一种载荷微型手抛折叠四旋翼无人机的制作方法
1.本实用新型属于无人机技术领域,具体涉及一种载荷微型手抛折叠四旋翼无人机。
背景技术:
2.随着科学技术的飞速发展,无人机在生活中的应用逐渐普遍开来。其中,四旋翼无人机在生活中的应用较为普遍,四旋翼无人机是通过高清摄像机实时传回第一手航拍视频资料用的无人机,但是由于现有生活中的四旋翼无人机设计结构过于简单,荷载能力普遍不高,有的甚至没有荷载能力,不能很好的进行物资传递,而且现有的四旋翼无人机机体普遍较重,在飞行期间不能很好的自由控制无人机的飞行,四旋翼无人机的起飞方式以地面遥控直升式为主,突破起飞模式,增大载荷,小体积,轻量化是我们现在要解决的问题,因此对于现有四旋翼无人机的改进,设计一种新型载荷微型手抛折叠四旋翼无人机以改变上述技术缺陷,提高整体四旋翼无人机的实用性,显得尤为重要。
技术实现要素:
3.针对上述现有技术中存在的问题,本实用新型的目的在于提供一种载荷微型手抛折叠四旋翼无人机,实现壳体和悬臂和折叠,在储存时能够对悬臂进行保护,避免其受到挤压而发生损坏,展开时能够保证无人机飞行的稳定性。
4.为了实现上述实用新型目的,本实用新型提供的一个技术方案如下:
5.一种载荷微型手抛折叠四旋翼无人机,包括壳体、设置于所述壳体上端的顶盖、和设置于所述壳体下端的底座;在所述壳体的外侧壁且沿竖直方向开设有内嵌槽,所述内嵌槽沿圆周方向设置有多个;所述内嵌槽靠近所述顶盖的一端转动设置有悬臂,所述悬臂可转动打开至水平或转动闭合于所述内嵌槽内;所述悬臂中部设置有无刷电机,所述无刷电机的输出轴上连接有桨叶,所述无刷电机和所述桨叶可嵌合进入或穿出所述内嵌槽。
6.优选的,所述顶盖靠近内嵌槽的一端设置有展开轴,所述悬臂转动连接于所述展开轴上,所述展开轴上设置有控制所述悬臂自动打开的弹性件;所述底座上设置有对所述悬臂进行锁定的锁定组件,所述悬臂嵌合于所述内嵌槽内时,所述锁定组件对所述悬臂进行锁定。
7.优选的,所述弹性件为弹性扭簧,所述锁定组件取消对所述悬臂的锁定时,所述弹性扭簧带动所述悬臂转动至水平。
8.优选的,所述顶盖上且位于所述内嵌槽的上端设置有倾斜的上限位端面;所述悬臂的上端呈圆弧状,所述悬臂的外侧面且靠近所述上限位端面的位置设置有下限位端面,所述悬臂转动至水平时,所述下限位端面和所述上限位端面平行,且相互贴合。
9.优选的,所述底座和所述壳体可拆卸固定连接;所述底座靠近所述壳体的一侧开设有安装腔;
10.所述锁定组件包括固定于所述壳体下端的电磁铁,所述电磁铁上设置有可沿竖直
方向移动的顶针,所述顶针位于所述安装腔内;所述安装腔内设置有压舌,所述压舌与所述顶针连接;所述安装腔的底部开设有环形槽;所述环形槽内设置有复位弹簧,所述复位弹簧抵接所述压舌,所述复位弹簧处于压缩状态;所述电磁铁通电时控制所述顶针带动所述压舌向下移动;所述电磁铁失电时,所述复位弹簧控制所述压舌恢复原位;所述压舌和所述悬臂下端之间设置相互扣合的锁扣结构;所述压舌恢复原位后,所述锁扣结构对所述悬臂限位,所述压舌向下移动时,所述锁扣结构取消对所述悬臂限位。
11.优选的,所述锁扣结构包括设置于悬臂下端的第一锁钩、和设置于所述压舌上侧面的第二锁钩,所述第一锁钩和第二锁钩可相互扣合;所述压舌包括与顶针连接的本体、以及与所述本体连接且与每一组悬臂一一对应的压板;所述每一块压板上分别设置第二锁钩。
12.优选的,所述壳体下端可拆卸安装有固定座,所述电磁铁安装于所述固定座上。
13.优选的,所述桨叶包括沿所述无刷电机输出轴对称设置的第一叶片和第二叶片;所述第一叶片和第二叶片与所述内嵌槽长度方向平行时可嵌合于所述内嵌槽内。
14.优选的,所述无刷电机和所述桨叶位于所述悬臂相对靠近所述内嵌槽的一侧面。
15.优选的,所述顶盖、壳体和所述底座的结合体呈“椭球体”结构。
16.本实用新型提供的一种载荷微型手抛折叠四旋翼无人机,通过开设于壳体上的内嵌槽、和可转动的悬臂,四旋翼无人机的悬臂在展开时,顶盖能够起到展开限位承力的作用,使得四组悬臂在展开时能够保持在同一水平面,保障了四旋翼无人机飞行时的稳定性,通过顶盖、壳体的结合体为椭球体结构设计,在储藏时,无刷电机和桨叶都收进了椭球体里,占用空间少,方便运输、储存和携带,且壳体能够对飞机的桨叶和无刷电机起到保护的作用,在存放期间,桨叶和无刷电机不会由于受到挤压而发生损坏,保障四旋翼无人机在使用期间能够正常使用,与现有的四旋翼无人机相比较,本实用新型通过设计能够提高四旋翼无人机的整体便捷性、安全性以及实用性。
附图说明
17.图1为本实用新型的一种载荷微型手抛折叠四旋翼无人机的结构示意图;
18.图2为图1的a-a向剖视图;
19.图3为图2中a结构的局部放大图;
20.图4为图2中b结构的局部放大图;
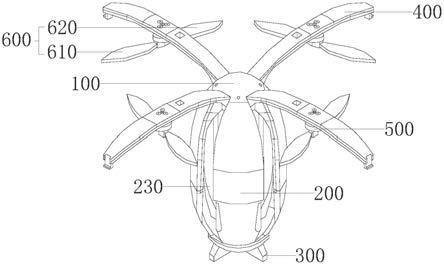
21.图5为本实用新型一种载荷微型手抛折叠四旋翼无人机展开时的状态示意图;
22.图6为本实用新型的一种载荷微型手抛折叠四旋翼无人机的俯视图。
23.图中附图标记:
24.100、顶盖;110、展开轴;120、上限位端面;
25.200、壳体;210、上壳体;220、下壳体;230、内嵌槽;240、固定座;
26.300、底座;310、安装腔;320、环形槽;
27.400、悬臂;410、下限位端面;
28.500、无刷电机;
29.600、桨叶;610、第一叶片;620、第二叶片;
30.700、锁定组件;710、电磁铁;711、顶针;720、压舌;730、复位弹簧;740、锁扣结构;
741、第一锁钩;742、第二锁钩。
具体实施方式
31.为了使本实用新型的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本实用新型做进一步说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.实施例
33.本实用新型提供了一种载荷微型手抛折叠四旋翼无人机,参见图1-图6,包括顶盖100、壳体200和底座300,壳体200包括上壳体210和下壳体220,上壳体210和下壳体220可拆卸固定连接。顶盖100、上壳体210和下壳体220的结合体为椭球体结构设计,下壳体220的底部设置有底座300。
34.壳体200的外侧壁且沿竖直方向开设有内嵌槽230,内嵌槽230沿壳体200的圆周方向等角度设置有若干个,在每一个内嵌槽230内设置有悬臂400,且悬臂400于靠近顶盖100的一端转动连接,悬臂400可转动打开至水平或转动闭合于内嵌槽230内。具体的,悬臂400设置有四组,悬臂400中部设置有无刷电机500,无刷电机500的输出轴上连接有桨叶600,无刷电机500和桨叶600可嵌合进入或穿出内嵌槽230。在壳体200内侧设置有电源和控制单元。
35.顶盖100靠近内嵌槽230的一端设置有展开轴110,悬臂400转动连接于展开轴110上,展开轴110上设置有控制悬臂400自动打开的弹性件;底座300上设置有对悬臂400进行锁定的锁定组件700,悬臂400嵌合于内嵌槽230内时,锁定组件700对悬臂400进行锁定。当需要飞行时,锁定组件700取消对悬臂400的锁定,弹性件控制悬臂400转动至水平状态,进行飞行。
36.具体的,弹性件为弹性扭簧,锁定组件700取消对悬臂400的锁定时,弹性扭簧带动悬臂400转动至水平。顶盖100上且位于内嵌槽230的上端设置有倾斜的上限位端面120;悬臂400的上端呈圆弧状,悬臂400的外侧面且靠近上限位端面120的位置设置有下限位端面410,悬臂400转动至水平时,下限位端面410和上限位端面120平行,且相互贴合。通过设置的上限位端面120和下限位端面410,当悬臂400转动至水平时,能够对悬臂400进行支撑,使其保持同一水平状态。保障了四旋翼无人机飞行时的稳定性,整体实用性较高,内嵌槽230的内部结构大小与悬臂400的外部结构大小相对应设置。
37.底座300和壳体200可拆卸固定连接;底座300靠近壳体200的一侧开设有安装腔310。
38.锁定组件700包括固定于壳体200下端的电磁铁710,电磁铁710上设置有可沿竖直方向移动的顶针711,顶针711位于安装腔310内;壳体200下端可拆卸安装有固定座240,电磁铁710安装于固定座240上。电磁铁710为推拉式电磁铁710,得电时可带动顶针711移动。
39.安装腔310内设置有压舌720,压舌720与顶针711连接;安装腔310的底部开设有环形槽320;环形槽320内设置有复位弹簧730,复位弹簧730抵接压舌720,复位弹簧730处于压缩状态;电磁铁710通电时控制顶针711带动压舌720向下移动;电磁铁710失电时,复位弹簧730控制压舌720恢复原位;压舌720和悬臂400下端之间设置相互扣合的锁扣结构740;压舌
720恢复原位后,锁扣结构740对悬臂400限位,压舌720向下移动时,锁扣结构740取消对悬臂400限位。
40.具体的,锁扣结构740包括设置于悬臂400下端的第一锁钩741、和设置于压舌720上侧面的第二锁钩742,第一锁钩741和第二锁钩742可相互扣合;压舌720包括与顶针711连接的本体、以及与本体连接且与每一组悬臂400一一对应的压板;每一块压板上分别设置第二锁钩742。在本实施例中悬臂400设置有四组,压板同样设置四组,每一组第一锁钩741和第二锁钩742一一对应,实现对四组悬臂400的锁定。
41.进一步的,桨叶600包括沿无刷电机500输出轴对称设置的第一叶片610和第二叶片620;第一叶片610和第二叶片620与内嵌槽230长度方向平行时可嵌合于所述内嵌槽230内。无刷电机500和桨叶600位于所述悬臂400相对靠近内嵌槽230的一侧面,且第一叶片610和第二叶片620的宽度小于内嵌槽230的宽度。
42.在储藏时,无刷电机500和桨叶600都收进了内嵌槽230内部,占用空间少,方便运输、储存和携带,且上壳体210和下壳体220能够对桨叶600和无刷电机500起到保护的作用。在存放期间,桨叶600和无刷电机500不会由于受到挤压而发生损坏,保障四旋翼无人机在使用期间能够正常使用,整体便捷性、安全性以及实用性较高。
43.本实用新型工作流程:在使用载荷微型手抛折叠四旋翼无人机时,首先将无人机拿在手上,竖直放置,然后上电启动,当电磁铁710得电后,电磁铁710会吸合,控制顶针711向下移动,带动压舌720向下带动。此时锁扣结构740取消对悬臂400的限位。悬臂400在弹性扭簧的作用下展开,直至若干悬臂400保持在同一平面。然后无刷电机500会带动桨叶600进行运作,无人机即可完成飞行,当对无人机回收时,对电磁铁710进行断电处理,此时电磁铁710没有磁性,顶针711失去动力,压舌720在复位弹簧730的作用下恢复至初始状态,此时可将无人机的悬臂400折叠回内嵌槽230的内部,此时压舌720会对悬臂400在此进行锁定。整个使用流程简单便捷,通过顶盖100的设计,四旋翼无人机的悬臂400在展开时,顶盖100能够起到展开限位承力的作用,使得四组悬臂400在展开时能够保持在同一水平面,保障了四旋翼无人机飞行时的稳定性,通过顶盖100、上壳体210和下壳体220的设计,顶盖100、上壳体210和下壳体220的结合体为椭球体结构设计,在储藏时,无刷电机500和桨叶600都收进了椭球体里,占用空间少,方便运输、储存和携带,且上壳体210和下壳体220能够对飞机的桨叶600和无刷电机500起到保护的作用,在存放期间,桨叶600和无刷电机500不会由于受到挤压而发生损坏,保障四旋翼无人机在使用期间能够正常使用,与现有的四旋翼无人机相比较,本实用新型通过设计能够提高四旋翼无人机的整体便捷性、安全性以及实用性。
44.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
45.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接、可以是机械连接,也可以是电连接、可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术
语在本实用新型中的具体含义。在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
46.以上所述实施例仅表达了本实用新型的实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1