搭载投弹的无人机设备及无人机投弹系统的制作方法
1.本发明涉及无人机应用技术领域,特别是一种搭载投弹的无人机设备及无人机投弹系统。
背景技术:
2.随着我军实战化推进,手榴弹在实战中发挥较大作用,战时人为投掷距离有效同时命中精度较低,其中的安全问题值得引关注。为了解决这一问题,目前采用技术逐渐成熟的无人机进行投掷,利用无人机进行投掷爆震弹、烟雾弹、手雷等,不仅可以在恶劣条件下进行投弹,而且还可以减少执行任务人员伤亡,此外投掷更准确快速。但是现有的无人机投掷设备大多根据具体的投弹结构进行改进,结构复杂且应用范围较窄;现有相关设备在空中执行任务时,无法对周围环境态势进行全面的感知和分析,对投弹投掷状态和故障问题无法即时获知。
3.为此,本发明结合对手榴弹构造及其投掷安全问题的正确分析,提出一种急速无人机搭载投弹器进手榴弹投掷,有效解决人工投掷和现有无人机设备投掷的弊端。
技术实现要素:
4.为了解决上述问题,本发明提出一种搭载投弹的无人机设备,该设备应用广泛且充分解决投掷距离短和命中精度低、超视距打击的缺陷,同时也解决直瞄武器的短板,可隐蔽远程控制,在空中执行任务时,可大范围侦查获取良好的环境态势感知。
5.为实现上述目的,本发明所采用的技术方案是一种搭载投弹的无人机设备,包括无人机主体和设于所述无人机主体下端的投弹承载装置;所述无人机主体的底部设有框架结构的载荷快拆结构件,所述框架结构中部设有母插接头,所述投弹承载装置的顶部通过可拆卸连接方式与所述载荷快拆结构件相连接;
6.所述投弹承载装置底部设有一对平行设置的连接杆,所述连接杆底部依次排列有若干个独立设置的投弹壳,所述投弹壳的底部设有可朝向外侧转动打开的转动门,所述投弹壳内装载有投弹,所述投弹放置于所述转动门上;所述投弹壳上设有固定投弹保险握片的握片推拉装置;位于两个所述连接杆中部的所述投弹承载装置上设有投弹控制装置,所述投弹控制装置的顶部设有与所述母插接头相匹配的公插接头。
7.一个改进的技术方案,所述载荷快拆结构件包括两对侧的插接板,所述插接板中部设有插杆槽;所述投弹承载装置顶部设有平行的两条对接杆,所述对接杆中部设有对接孔,所述对接孔与插杆槽通过插销件连接,且在连接状态下,所述对接杆恰好设于所述插杆槽的外侧。
8.进一步的,所述插杆槽的直径小于所述对接孔的直径;所述插销件由同一中轴线的旋拧头、螺纹杆体和插接杆体一体成型,所述螺纹杆体与所述对接孔螺纹对接,所述插接杆体与插杆槽相配合。
9.一个改进的技术方案,所述握片推拉装置包括握片挂接件和握片拉杆组件;所述
握片挂接件呈之直条状的凹形框构造,所述凹形框内侧形态与所述投弹保险握片相匹配,所述凹形框内侧中部设有握挂所述投弹保险握片的卡块,所述握片挂接件设于投弹壳内一侧;所述握片拉杆组件包括第一转杆、第二转杆和固定转轴,所述固定转轴设于投弹壳外侧面;所述第一转杆一端固接于所述握片挂接件背面,另一端伸出所述投弹壳并与所述第二转杆的一端转动连接,所述第二转杆的另一端转动连接于所述固定转轴。
10.一个改进的技术方案,所述投弹壳的底部设有与所述转动门相匹配的缺口部,所述缺口部位置对应的投弹壳一侧壁外设有旋转电机,所述旋转电机通过旋转轴连接转动门,所述转动门在旋转电机驱动下朝向缺口部外沿转动打开,所述转动门对应缺口部内侧的投弹壳壁面上设有用于即时感应转动门状态的第一传感器;
11.所述投弹壳内侧顶部设有感应投弹是否投掷出去的第二传感装置;所述第一传感器和第二传感器均包括位置传感器和压力传感器。
12.一个改进的技术方案,所述连接杆两侧设有脚架,所述脚架的高度高于投弹壳的高度;每个所述连接杆上安装的投弹壳数量为2-5个。
13.一个改进的技术方案,所述无人机主体的前端均设有可见光和热成像的双光摄像头,所述无人机主体还设有与其无人机控制器相连接的北斗/gps导航模块和信号通信模块,所述无人机主体底部和/或侧面还设有与无人机控制器相连接的激光测距仪、瞄准器、雷达和光感传感器。
14.本发明第二方面公开了一种应用上述设备的无人机投弹系统,所述系统包括通信连接的无人机控制端和投弹承载端;
15.设于无人机控制端的:
16.跟踪锁定模块,配置为通过双光摄像头捕捉可疑目标,并用激光测距仪计算可疑目标信息的距离传递给无人机控制器,无人机控制器实时对可疑目标的追踪;
17.态势感知模块,配置雷达、光感传感器、双光摄像头获取地面环境和追踪状态下可疑目标的感知信息,进行时间配准和空间配准并融合,识别并确定可疑目标的特征,并与特定目标的特征进行特征匹配,预估可疑目标的移动轨迹;
18.通信模块,配置为与地面遥控终端相通信;
19.以及,设于投弹承载端的:
20.投弹投掷模块,配置在接收到无人机控制端的投掷指令时,控制投弹壳打开底部转动门,投弹向下掉落并在握片推拉装置的牵扯力下与投弹保险握片分离,实现投弹的投掷;
21.实时监控模块,配置为通过传感装置监控投弹处于未投掷还是投掷状态,并将状态信息实时上传至无人机控制器。
22.一个改进的技术方案中,所述无人机控制端还设有投掷方式设定模块,配置为通过北斗/gps导航模块分析可疑目标的位置来进行投弹投掷的方式;具体的,当可疑目标进入设定的追踪范围时,无人机控制端启动攻击,跟踪锁定模块控制无人机实施追踪,当可疑目标进入射程范围后用瞄准器瞄准并锁定可疑目标,并将操作信息传输至地面遥控终端,随后通过地面遥控终端对投弹控制模块下达投掷指令,进行投弹投掷。
23.本发明第二方面公开了一种无人机系统的投弹投掷方法,包括下述步骤:
24.s1、跟踪锁定:通过双光摄像头捕捉可疑目标,并用激光测距仪计算可疑目标信息
的距离传递给无人机控制器,无人机控制器实时对可疑目标的追踪;
25.s2、态势感知:通过雷达、光感传感器、双光摄像头获取地面环境和追踪状态下可疑目标的感知信息,进行时间配准和空间配准并融合,识别并确定可疑目标的特征,并与特定目标的特征进行特征匹配,预估可疑目标的移动轨迹;
26.s3、遥控指令:将可疑目标及地面环境的信息传输至地面遥控终端,地面遥控终端判断是否下达投掷指令,如是,则向投掷指令传送至无人机控制端;
27.s4、投弹投掷:投弹投掷模块接收到投掷指令,控制投弹壳打开底部转动门,投弹向下掉落并在握片推拉装置的牵扯力下与投弹保险握片分离,进行投弹的投掷;
28.s5、实时监控反馈:通过设置在投弹壳内的传感组件监控投弹是否投掷成功,并将对应信息实时上传至无人机控制端和地面遥控终端;其中,所述传感组件包括设于转动门内侧的第一传感器和设于投弹顶部的第二传感器;
29.s6、故障智能控制:无人机控制端通过第一传感器监测的实时信息判断故障是否出现在转动门开启失败;通过第二传感器监测的实时信息判断故障是否出现在投弹的保险握片解除失败;
30.s7、故障判断及处理:根据具体的故障信息执行自主修复操作,当判断为转动门开启失败时,则再次控制转动门转动开启,如操作失败则进行人工检查;当判断为投弹的保险握片解除失败时,则通过握片推拉装置对保险握片的拉开动作解除投弹的保险握片,如操作失败则进行人工检查。
31.相较于现有技术,本发明无人机设备通过投弹壳底部转动门和握片推拉装置控制投弹的投掷操作,其结构及实现方式简单,适用于多类型的投弹,克服了现有技术的使用局限性;通过无人机平台的结构转接件模块化对接,实现快拆载荷快速更换。
32.本发明设备及系统还具有全自主追踪、锁定目标后进行投掷功能,能实现下视切换精准投掷和周围环境的态势感知;为无人机挂载投弹装置有效解决地形环境的影响,可进行视距外的远程投掷打击,通过地面端手持终端发射无线电信号操控无人机和投弹机构的运行,并控制瞄准目标进行远程投掷。
33.此外,本发明设备及系统同时具多级安全保险装置,保证投掷前期人员与飞行平台的安全型,同时兼顾多种安全保险状态解保,同时具备多级安装状态反馈,可将投掷状态实时反馈到操作者,下势瞄准为可视化状态反馈。
附图说明
34.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简要介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,还可根据这些附图获得其他的附图。
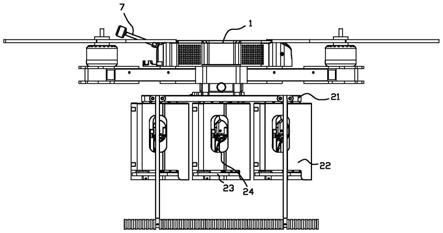
35.图1为本发明无人机设备的侧面视图;
36.图2为本发明无人机设备的俯视图;
37.图3为本发明无人机设备的正面视图;
38.图4为图3中部位a的局部放大图;
39.图5为本发明投弹承载装置与载荷快拆结构件连接部位的局部剖面示意图;
40.图6为本发明投弹承载装置的侧面剖视图;
41.图7为本发明投弹壳的结构示意图;
42.图8为本发明无人机投弹系统的结构示意图。
具体实施方式
43.为了使本技术的目的、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
44.图1-3所示,本发明一种搭载投弹的无人机设备包括无人机主体1和设于所述无人机主体1下端的投弹承载装置;所述无人机主体1的底部设有框架结构的载荷快拆结构件10,所述框架结构中部设有母插接头11,所述投弹承载装置的顶部通过可拆卸连接方式与所述载荷快拆结构件相连接。
45.所述投弹承载装置底部设有一对平行设置的连接杆21,所述连接杆21底部依次排列有若干个独立设置的投弹壳22,所述投弹壳22的底部设有可朝向外侧转动打开的转动门23,所述投弹壳22内装载有投弹24,所述投弹24放置于所述转动门23上;所述投弹壳22上设有固定投弹保险握片的握片推拉装置;位于两个所述连接杆21中部的所述投弹承载装置上设有投弹控制装置30,所述投弹控制装置30的顶部设有与所述母插接头11相匹配的公插接头。通过公插接头和母插接头的连接实现投弹控制装置和无人机控制装置的通信。投弹承载装置在投掷时,底部转动门开启,内部投弹下落并使握片推拉装置牵扯投弹保险握片,解除保险,实现投弹的投掷和爆炸,该结构简单有效,并由于投弹壳仅需针对投弹保险握片设置牵引结构,并不需要针对具体的投弹类型进行复杂的结构改进,同时可适用于大多数类型的投弹。
46.图4-5所示的投弹承载装置与载荷快拆结构件连接部位结构:所述载荷快拆结构件10包括两对侧的插接板13,所述插接板13中部设有插杆槽14;所述投弹承载装置顶部设有平行的两条对接杆25,所述对接杆25中部设有对接孔26,所述对接孔26与插杆槽14通过插销件27连接,且在连接状态下,所述对接杆25恰好设于所述插杆槽14的外侧。
47.所述插杆槽14的直径小于所述对接孔26的直径;所述插销件27由同一中轴线的旋拧头270、螺纹杆体271和插接杆体272一体成型,所述螺纹杆体271与所述对接孔26螺纹对接,所述插接杆体272与插杆槽14相配合。
48.安装时,直接将对接杆恰置于插杆槽的外侧后,插入插销件固定即可,通过该结构转接件模块化对接,实现快拆载荷快速更换。
49.图6-7所示的投弹承载装置中,所述握片推拉装置包括握片挂接件40和握片拉杆组件41;所述握片挂接件40呈之直条状的凹形框构造,所述凹形框内侧形态与所述投弹保险握片相匹配,所述凹形框内侧中部设有握挂所述投弹保险握片的卡块42,所述握片挂接件40设于投弹壳22内一侧;所述握片拉杆组件41包括第一转杆410、第二转杆411和固定转轴412,所述固定转轴412设于投弹壳22外侧面;所述第一转杆410一端固接于所述握片挂接件40背面,另一端伸出所述投弹壳22并与所述第二转杆411的一端转动连接,所述第二转杆411的另一端转动连接于所述固定转轴412。握片推拉装置用于固定投弹的保险握片,在投弹下坠时接口拉开保险握片,实现下一步的投弹引爆;设置的多转杆结构的握片拉杆组件则可通过转杆的拉动里,进一步保证保险握片的顺利解开。
50.所述投弹壳22的底部设有与所述转动门23相匹配的缺口部50,所述缺口部50位置对应的投弹壳22一侧壁外设有旋转电机51,所述旋转电机51通过旋转轴52连接转动门23,所述转动门23在旋转电机51驱动下朝向缺口部50外沿转动打开,所述转动门23对应缺口部50内侧的投弹壳22壁面上设有用于即时感应转动门23状态的第一传感器53。所述投弹壳22内侧顶部设有感应投弹是否投掷出去的第二传感装置54;所述第一传感器53和第二传感器54均包括位置传感器和压力传感器。通过第一传感器监测的实时信息可知在投掷时是否出现在转动门开启失败;通过第二传感器监测的实时信息可知在投掷时是否出现在投弹的保险握片解除失败;可将投掷状态实时反馈到操作者,并对应不同的故障进行针对性处理。
51.此外,所述连接杆21两侧设有脚架27,所述脚架27的高度高于投弹壳22的高度;每个所述连接杆21上安装的投弹壳22数量为2-5个。
52.本发明无人机设备的另一个示例中,所述无人机主体1的前端均设有可见光和热成像的双光摄像头6,所述无人机主体1还设有与其无人机控制器相连接的北斗/gps导航模块7和信号通信模块,所述无人机主体1底部和/或侧面还设有与无人机控制器相连接的激光测距仪、瞄准器、雷达和光感传感器。通过上述仪器传感器实现目标的跟踪锁定以及周围环境的态势感知,实现视距外打击精确打击;双光摄像头包括可见光和红外光,可根据光感传感器感知的光的类型判断是白天还是黑夜的信息来转换使用,以适用于夜间和白天的侦察需求;当双光摄像头捕捉到有可疑目标侵入时,捕捉人脸或服装等画面信息,用激光测距仪计算可疑目标的距离;北斗/gps导航模块分析当前可疑目标的位置,协助控制模块控制无人机实施追踪。
53.本发明第二方面给出的实施例为基于上述结构的无人机系统,图8所示,所述系统包括通信连接的无人机控制端和投弹承载端。
54.设于无人机控制端的模块包括:
55.跟踪锁定模块,配置为通过双光摄像头捕捉可疑目标,并用激光测距仪计算可疑目标信息的距离传递给无人机控制器,无人机控制器实时对可疑目标的追踪;
56.态势感知模块,配置雷达、光感传感器、双光摄像头获取地面环境和追踪状态下可疑目标的感知信息,进行时间配准和空间配准并融合,识别并确定可疑目标的特征,并与特定目标的特征进行特征匹配,预估可疑目标的移动轨迹;需要说明的是,本发明所述态势感知模块技术利用多种传感器获取环境下多目标态势数据,如包括场景三维点云、深度图像、彩色图像,首先进行时间配准和空间配准并融合,识别目标并确定目标框;然后提取目标框中目标的特征,并与特定目标的特征进行特征匹配,预估目标的移动轨迹;根据无人机的三维位置和姿态信息,预估目标的移动轨迹。
57.投掷方式设定模块,配置为通过北斗/gps导航模块分析可疑目标的位置来进行投弹投掷的方式;具体的,当可疑目标进入设定的追踪范围时,无人机控制端启动攻击,跟踪锁定模块控制无人机实施追踪,当可疑目标进入射程范围后用瞄准器瞄准并锁定可疑目标,并将操作信息传输至地面遥控终端,随后通过地面遥控终端对投弹控制模块下达投掷指令,进行投弹投掷;
58.通信模块,配置为与地面遥控终端相通信,所述地面遥控终端包括手持终端,终端显示器可将接受的信息数据进行可视化显示。
59.设于投弹承载端的模块包括:
60.投弹投掷模块,配置在接收到无人机控制端的投掷指令时,控制投弹壳打开底部转动门,投弹向下掉落并在握片推拉装置的牵扯力下与投弹保险握片分离,实现投弹的投掷。
61.实时监控模块,配置为通过传感装置监控投弹处于未投掷还是投掷状态,并将状态信息实时上传至无人机控制器。
62.无人机系统除了根据上述模块对应实现其模块功能的方法外,还扩展有多级安装状态反馈和投掷状态实时反馈方法。本发明第三方面给出的实施例为基于无人机系统的投弹投掷方法,具体的包括下述步骤:
63.s1、跟踪锁定:通过双光摄像头捕捉可疑目标,并用激光测距仪计算可疑目标信息的距离传递给无人机控制器,无人机控制器实时对可疑目标的追踪;
64.s2、态势感知:通过雷达、光感传感器、双光摄像头获取地面环境和追踪状态下可疑目标的感知信息,进行时间配准和空间配准并融合,识别并确定可疑目标的特征,并与特定目标的特征进行特征匹配,预估可疑目标的移动轨迹;
65.s3、遥控指令:将可疑目标及地面环境的信息传输至地面遥控终端,地面遥控终端判断是否下达投掷指令,如是,则向投掷指令传送至无人机控制端;
66.s4、投弹投掷:投弹投掷模块接收到投掷指令,控制投弹壳打开底部转动门,投弹向下掉落并在握片推拉装置的牵扯力下与投弹保险握片分离,进行投弹的投掷;
67.s5、实时监控反馈:通过设置在投弹壳内的传感组件监控投弹是否投掷成功,并将对应信息实时上传至无人机控制端和地面遥控终端;其中,所述传感组件包括设于转动门内侧的第一传感器和设于投弹顶部的第二传感器;
68.s6、故障智能控制:无人机控制端通过第一传感器监测的实时信息判断故障是否出现在转动门开启失败;通过第二传感器监测的实时信息判断故障是否出现在投弹的保险握片解除失败;
69.s7、故障判断及处理:根据具体的故障信息执行自主修复操作,当判断为转动门开启失败时,则再次控制转动门转动开启,如操作失败则进行人工检查;当判断为投弹的保险握片解除失败时,则通过握片推拉装置对保险握片的拉开动作解除投弹的保险握片,如操作失败则进行人工检查。
70.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、装置、物品或者方法不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、装置、物品或者方法所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、装置、物品或者方法中还存在另外的相同要素。
71.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上所述的一个存储介质如rom/ram、磁碟、光盘中,包括若干程序用以使得一台终端设备可以是手机,计算机,服务器,或者网络设备等执行本发明各个实施例所述的方法。
72.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1