一种无人机测绘数据采集装置的制作方法
1.本发明涉及无人机领域,更具体地说,本发明涉及一种无人机测绘数据采集装置。
背景技术:
2.经济的快速发展促使了人们对于工程测绘质量提出了更高的要求,推动着相关技术的改革和创新,无人机遥感测绘在此背景之下应运而生。作为一种新型测试技术,无人机遥感测绘有着其他手段所无法比拟的优势,涉及了多个层面的内容,对于提高测绘工作的精度和效率都有表现出了很明显的优势,研究无人机遥感测绘技术在工程测绘中的应用的相关问题,对于促进无人机遥感测绘技术更快更好地发展有十分重要的现实意义。
3.目前,现有的无人机在测绘使用时,其主要存在:稳定性不高且缓冲效果不好,无法对采集数据进行一体化处理,导致使用效果不佳,故基于上述问题,为此我们设计这样一种无人机测绘数据采集装置,来解决上述问题。
4.在所述背景技术部分公开的上述信息仅用于加强对本公开的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
5.为了克服现有技术的上述缺陷,本发明的实施例提供一种无人机测绘数据采集装置,本发明所要解决的技术问题是:稳定性不高且缓冲效果不好,无法对采集数据进行一体化处理,导致使用效果不佳。
6.为实现上述目的,本发明提供如下技术方案:一种无人机测绘数据采集装置,包括设在无人机上的采集组件、数据处理单元与支撑缓冲机构,所述无人机的侧面依次设有四组飞行组件,所述采集组件包括采集摄像头、转动模块一、转动模块二与安装支杆,所述支撑缓冲机构分为支撑组件、底支架、减震缓冲组件;所述支撑组件包括四个支撑杆与四个连杆,所述底支架包括两个固定座与两个固定杆,所述减震缓冲组件包括四个套环、两个固定块以及四个压缩弹簧;所述数据处理单元包括plc控制模块、参数设定模块、处理分析芯片、分类储存模块、数据库、信号转换模块、定时模块与联网芯片。
7.在一个优选地实施方式中,所述转动模块一设在无人机的内部,所述安装支杆通过轴承转动安装在无人机的前侧底端,同时转动模块一的主轴与安装支杆对接,所述采集摄像头通过转轴转动设在安装支杆的端口内侧,所述转动模块二固定设在安装支杆的一侧,同时主轴与采集摄像头对接。
8.在一个优选地实施方式中,所述采集摄像头内设有摄像模块、频率设定模块与图像缩放拍摄模块,所述摄像模块与频率设定模块、图像缩放拍摄模块信号连接。
9.在一个优选地实施方式中,所述参数设定模块、处理分析芯片、分类储存模块、数据库、信号转换模块、定时模块与联网芯片均与plc控制模块信号连接。
10.在一个优选地实施方式中,所述联网芯片包括无线数据传输模块、gps定位模块与
预警模块。
11.在一个优选地实施方式中,所述采集摄像头分别与信号转换模块、定时模块信号连接,所述定时模块、处理分析芯片与参数设定模块信号连接。
12.在一个优选地实施方式中,四个所述支撑杆分别倾斜固定安装在无人机的底端四角处,同时四个连杆分别通过转轴转动安装在支撑杆内壁面端口内,两个所述固定座的内侧相对面均竖向开设有限位滑槽,同时四个支撑杆的另一端分别两两滑动安装在限位滑槽中。
13.在一个优选地实施方式中,两个所述固定块分别固定安装在固定杆的中部,四个所述套环分别两两活动套在两个固定杆上且位于固定块的两侧,四个所述压缩弹簧分别两两套在固定杆上,同时两端分别与套环、固定块固定连接,四个所述连杆的另一端分别通过转轴与套环的顶端转动连接。
14.本发明的技术效果和优点:1、本发明通过设置数据处理单元,那么在设定的时间参数内,利用摄像模块控制采集摄像头对所在范围进行拍摄,此时频率设定模块与图像缩放拍摄模块分别控制拍摄频率与图像比例的缩放,转动模块一、转动模块二用于采集摄像头的转向,便于更好的拍摄测绘数据;而摄像模块将拍摄的数据经信号转换模块转换后传给plc控制模块,那么plc控制模块控制处理分析芯片对图片的清晰度、拍摄角度及是否存在火灾等情况进行预处理,则根据参数的设定,处理分析芯片控制删除摄像模块将拍摄的数据内容,当发现存在火灾情况,则反馈信号给plc控制模块,则plc控制模块控制联网芯片中的预警模块进行预警,并将gps定位模块显示的位置等数据利用无线数据传输模块传输给地面控制室,以此来提高工作效率及事故发生后处理效率;2、本发明当处理分析芯片预处理完毕之后,plc控制模块控制分类储存模块储存于数据库,此时可利用无线数据传输模块实时传输给地面控制室也可下载数据;实施过程中:利用设置的支撑缓冲机构,即支撑组件、底支架,在落地时对无人机进行稳定支撑,并且在减震缓冲组件,即四个套环、两个固定块以及四个压缩弹簧的作用下,进行减震缓冲,防止震动造成无人机及数据处理单元内部精密元件发生损坏,达到提高使用寿命的特点,采用上述设计后,具有稳定性高且缓冲效果好的特点,能够做到对采集数据进行一体化处理,使用效果更佳。
附图说明
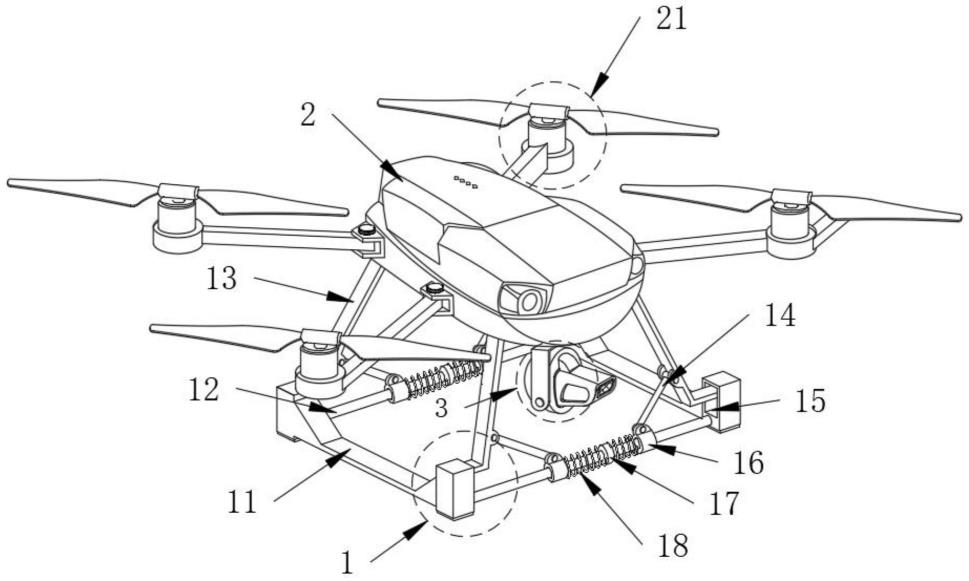
15.图1为本发明整体结构示意图。
16.图2为本发明图1中局部放大连接结构示意图。
17.图3为本发明系统原理总框图。
18.图4为本发明定时模块、信号转换模块、采集摄像头连接原理框图。
19.图5为本发明参数设定模块、定时模块、处理分析芯片连接原理框图。
20.附图标记为:1、支撑缓冲机构;11、固定座;12、固定杆;13、支撑杆;14、连杆;15、限位滑槽;16、套环;17、固定块;18、压缩弹簧;2、无人机;21、飞行组件;3、采集组件;31、采集摄像头;311、摄像模块;312、频率设定模块;313、图像缩放拍摄模块;32、转动模块一;33、转动模块二;34、安装支杆;4、数据处理单元;41、plc控制模块;42、参数设定模块;43、处理分
析芯片;44、分类储存模块;45、数据库;46、信号转换模块;47、定时模块;48、联网芯片;481、无线数据传输模块;482、gps定位模块;483、预警模块。
具体实施方式
21.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些示例实施方式使得本公开的描述将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。附图仅为本公开的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
22.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多示例实施方式中。在下面的描述中,提供许多具体细节从而给出对本公开的示例实施方式的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而省略所述特定细节中的一个或更多,或者可以采用其它的方法、组元、步骤等。在其它情况下,不详细示出或描述公知结构、方法、实现或者操作以避免喧宾夺主而使得本公开的各方面变得模糊。
实施例
23.结合附图1-5所示,实施方式具体为:本发明提供了一种无人机测绘数据采集装置,包括设在无人机2上的采集组件3、数据处理单元4与支撑缓冲机构1,无人机2的侧面依次设有四组飞行组件21,采集组件3包括采集摄像头31、转动模块一32、转动模块二33与安装支杆34,支撑缓冲机构1分为支撑组件、底支架、减震缓冲组件,支撑组件包括四个支撑杆13与四个连杆14,底支架包括两个固定座11与两个固定杆12,减震缓冲组件包括四个套环16、两个固定块17以及四个压缩弹簧18;数据处理单元4包括plc控制模块41、参数设定模块42、处理分析芯片43、分类储存模块44、数据库45、信号转换模块46、定时模块47与联网芯片48,操作人员在地面操作控制器控制无人机2的飞行,即利用飞行组件21带动无人机2的本体及采集组件3、支撑缓冲机构1飞起,那么在设定的时间参数内,摄像模块311控制采集摄像头31对所在范围进行拍摄,然后摄像模块311将拍摄的数据经信号转换模块46转换后传给plc控制模块41,那么plc控制模块41控制处理分析芯片43对图片的清晰度、拍摄角度及是否存在火灾等情况进行预处理,则根据参数的设定,处理分析芯片43控制删除摄像模块311将拍摄的数据内容,当发现存在火灾情况,则反馈信号给plc控制模块41,则plc控制模块41控制联网芯片48中的预警模块483进行预警,并将gps定位模块482显示的位置等数据利用无线数据传输模块481传输给地面控制室,以此来提高工作效率及事故发生后处理效率,当处理分析芯片43预处理完毕之后,plc控制模块41控制分类储存模块44储存于数据库45,此时可利用无线数据传输模块481实时传输给地面控制室也可下载数据。
24.转动模块一32设在无人机2的内部,安装支杆34通过轴承转动安装在无人机2的前侧底端,同时转动模块一32的主轴与安装支杆34对接,采集摄像头31通过转轴转动设在安装支杆34的端口内侧,转动模块二33固定设在安装支杆34的一侧,同时主轴与采集摄像头31对接;采集摄像头31内设有摄像模块311、频率设定模块312与图像缩放拍摄模块313,摄像模块311与频率设定模块312、图像缩放拍摄模块313信号连接,此时频率设定模块312与
图像缩放拍摄模块313分别控制拍摄频率与图像比例的缩放,转动模块一32、转动模块二33用于采集摄像头31的转向,便于更好的拍摄测绘数据;参数设定模块42、处理分析芯片43、分类储存模块44、数据库45、信号转换模块46、定时模块47与联网芯片48均与plc控制模块41信号连接;联网芯片48包括无线数据传输模块481、gps定位模块482与预警模块483;采集摄像头31分别与信号转换模块46、定时模块47信号连接,定时模块47、处理分析芯片43与参数设定模块42信号连接,此时的处理分析芯片43包括对图片的清晰度、拍摄角度及是否存在火灾等情况进行预处理;四个支撑杆13分别倾斜固定安装在无人机2的底端四角处,同时四个连杆14分别通过转轴转动安装在支撑杆13内壁面端口内,两个固定座11的内侧相对面均竖向开设有限位滑槽15,同时四个支撑杆13的另一端分别两两滑动安装在限位滑槽15中;两个固定块17分别固定安装在固定杆12的中部,四个套环16分别两两活动套在两个固定杆12上且位于固定块17的两侧,四个压缩弹簧18分别两两套在固定杆12上,同时两端分别与套环16、固定块17固定连接,四个连杆14的另一端分别通过转轴与套环16的顶端转动连接,实施过程中:利用设置的支撑缓冲机构1,即支撑组件、底支架,在落地时对无人机2进行稳定支撑,并且在减震缓冲组件,即四个套环16、两个固定块17以及四个压缩弹簧18的作用下,进行减震缓冲,防止震动造成无人机2及数据处理单元4内部精密元件发生损坏,达到提高使用寿命的特点。
25.工作原理组装时:先将支撑缓冲机构1,即支撑组件:四个支撑杆13与四个连杆14,底支架:两个固定座11与两个固定杆12,减震缓冲组件:四个套环16、两个固定块17以及四个压缩弹簧18分别安装在无人机2底端,实现对无人机2的支撑与减震缓冲;然后将采集组件3,即采集摄像头31、转动模块一32、转动模块二33与安装支杆34安装在无人机2上,实现测绘数据的采集,再将数据处理单元4组装在无人机2上,然后将无人机2、数据处理单元4、采集组件3信号连接调试好,并设定好各类参数,完成整体的组装;实施时:操作人员在地面操作控制器控制无人机2的飞行,即利用飞行组件21带动无人机2的本体及采集组件3、支撑缓冲机构1飞起,那么在设定的时间参数内,摄像模块311控制采集摄像头31对所在范围进行拍摄,此时频率设定模块312与图像缩放拍摄模块313分别控制拍摄频率与图像比例的缩放,转动模块一32、转动模块二33用于采集摄像头31的转向,便于更好的拍摄测绘数据;然后摄像模块311将拍摄的数据经信号转换模块46转换后传给plc控制模块41,那么plc控制模块41控制处理分析芯片43对图片的清晰度、拍摄角度及是否存在火灾等情况进行预处理,则根据参数的设定,处理分析芯片43控制删除摄像模块311将拍摄的数据内容,当发现存在火灾情况,则反馈信号给plc控制模块41,则plc控制模块41控制联网芯片48中的预警模块483进行预警,并将gps定位模块482显示的位置等数据利用无线数据传输模块481传输给地面控制室,以此来提高工作效率及事故发生后处理效率;当处理分析芯片43预处理完毕之后,plc控制模块41控制分类储存模块44储存于数据库45,此时可利用无线数据传输模块481实时传输给地面控制室也可下载数据;实施过程中:利用设置的支撑缓冲机构1,即支撑组件、底支架,在落地时对无人机2进行稳定支撑,并且在减震缓冲组件,即四个套环16、两个固定块17以及四个压缩弹簧18的作用下,进行减震缓冲,防止震动造成无人机2及数据处理单元4内部精密元件发生损坏,达到提高使用寿
命的特点。
26.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1