一种智能无人机巡检装置及巡检方法
本发明属于高压输电无人机巡检,特别涉及一种智能无人机巡检装置及巡检方法。
背景技术:
1、无人机巡检技术主要是指工作人员通过对无人机进行远程操作,利用无人机中的传感设备来高效、高质地完成对电力工程中架空输电线路的自动巡检工作。与传统的人工巡检方式相比,该技术可以将巡检效率提升八至十倍,且具有成本低廉、安全高效、操作简单、机动灵活、视野良好、无须线路改造等应用优势。
2、但是,在相关巡检技术方案中,尤其是无人机巡检装置的智能化与多功能化方面,目前虽然取得了一定的进展,但是无人机功能较为单一,只能依靠摄像头进行普通的观察,对于突发故障的处理的功能仍然处于空白状态,排故工作依旧交给人工处理,这不仅影响排故的及时性,极容易增大安全隐患,扩大故障范围,而且增大了人工的工作量与检修成本,降低了输电线路的巡检效率;因此,需要设计一种智能无人机巡检装置及巡检方法来解决上述问题。
技术实现思路
1、本发明所要解决的技术问题是提供一种智能无人机巡检装置及巡检方法,该装置解决了现有技术功能单一,不能对突发故障进行处理,需要人工排故,不仅影响排故的及时性,极容易增大安全隐患,扩大故障范围,而且增大了人工的工作量与检修成本,降低了输电线路的巡检效率的问题,具有可在高空进行故障排查与处理,无需等待人工排故的特点。
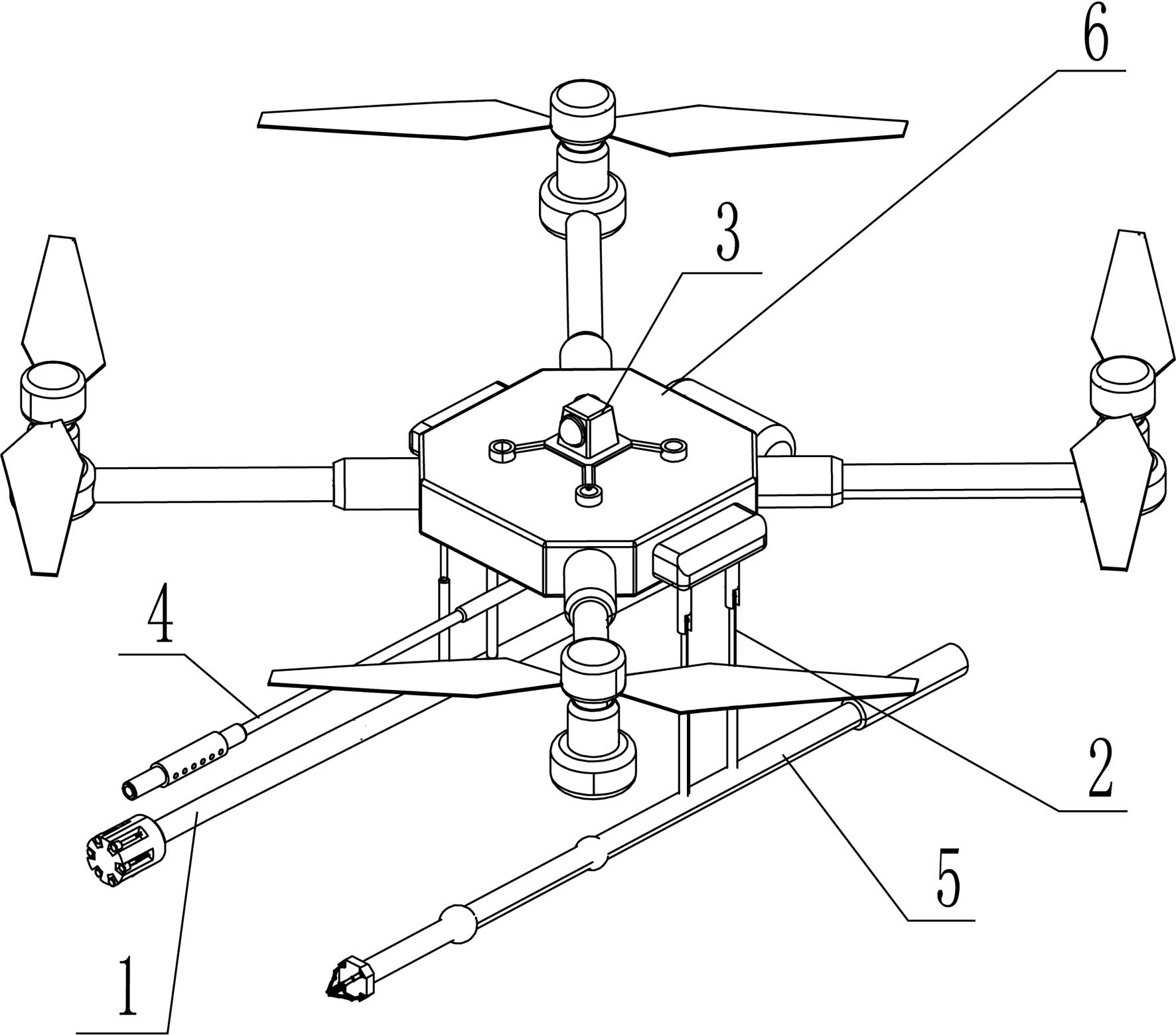
2、为解决上述技术问题,本发明所采用的技术方案是:一种智能无人机巡检装置,包括无人机本体;无人机本体顶部连接有摄像头模块,底部连接有火焰喷射器模块;无人机本体旋翼下方通过连接有支撑控制杆,支撑控制杆端部连接有万向操作杆模块以及机械臂模块;火焰喷射器模块包括端部的喷枪散热器和针孔摄像头,火焰喷射器模块尾端连接有底盘和圆柱形转动控制器,底盘尾端连接有导气管和储气缸;机械臂模块包括第一后臂关节和第一前臂关节,机械臂模块端部连接有旋转操作装置和夹爪,机械臂模块端部尾端连接有第一减震装置。
3、优选地,机械臂模块为套筒关节结构,套筒关节结构通过气缸进行伸缩;夹爪后端为刚性结构,前端为柔性结构。
4、进一步地,其具体结构为套筒式关节结构,其关节既可以在伺服电机的操纵下做三百六十度的高自由度旋转;同时也可以对前臂进行伸缩处理,关节内部有压力传送装置,通过夹紧前臂,向后收缩,由于后臂为高强度中空结构,前臂在关节传送装置的作用下,缩回至后臂的中空部位;其驱动方式为电气驱动式,由无人机主电源直接供电,采用直流供电的模式,其中,可以通过调节电源电压的方式控制伺服电机的转速,电压越小转速越低,电压为零时,停止转动,此时机械臂将停止工作,处于承重状态,变成无人机站架。因为电源方便,信号流传播迅速,所以响应速度较快,驱动力较大,信号检测、传动、处理方便,并可采用多种灵活的控制方案。在夹爪方面,夹爪的后端为刚性部分,用于承受被夹物体的重力,前端为柔性部分,便于控制夹持力度,能够保证尽量不损坏轻小薄弱的被夹物体,达到力度与定位的精准性。
5、进一步地,配有智能算法的高清摄像头,通过红外与超声波的综合探测,能精准定位故障目标;通过智能算法程序,对目标进行立体化呈现,并将图形传输至控制端,同时该智能算法能进行简单的故障排除分析,综合评估故障状况,并预测未来故障走势,同时提出相关建议,供操作员参考。
6、优选地,火焰喷射器模块为伸缩式转动单管结构;底盘与无人机本体底部连接;圆柱形转动装置与底盘下部连接。
7、进一步地,火焰喷射器模块主要通过高温长距喷枪有效清除输电线路的高空悬挂的有机异物,如风筝,布料,动物尸体;其具有喷射速度快,消耗燃料少,喷射精度高的特点;具体结构为可伸缩式转动单管结构,其中底盘位于无人机机身底部,用于固定喷火装置;底盘下方为一个圆柱形转动装置,其上部连接底盘,可进行360度旋转操作,但由于无人机自身结构的限制,只能在前方一百二十度范围内旋转,可对目标物进行横向扫射;其下部连接高温喷枪枪身,设有上下旋转装置,可上下旋转五度,对目标物进行纵向清理操作;高温喷枪枪身直接连接喷枪枪管,枪身前方有伸缩装置,可调节枪管自身的长度,以适应不同距离的目标;在枪管的最前端装有散热器,在散热器的上方装有针孔摄像头,用于精准定位喷火的目标点。
8、优选地,万向操作杆模块包括套筒式关节结构,套筒式关节结构通过第二前臂关节以及第二后臂关节连接;杆状结构前端连接有圆柱工作台,杆状结构后端连接有第二减震装置。
9、优选地,圆柱工作台与万向操作杆模块前端转动连接,通过电机驱动旋转;圆柱工作台表面连接有多种转动回收操作工具。
10、进一步地,万向操作杆模块主要能对输电线路中存在的复杂故障进行排故;其配备有功能强大的工具箱,可进行多项复杂操作;同时万向杆为该排故提供强大的机动灵活性,并在5g传输技术的加持下,做到零延时,高精度,高效率排故;其具体结构为套筒式关节结构,其关节既可以在伺服电机的操纵下做三百六十度的高自由度旋转;同时也可以对前臂进行伸缩处理,关节内部有压力传送装置,通过夹紧前臂,向后收缩,由于后臂为高强度中空结构,前臂在关节传送装置的作用下,缩回至后臂的中空部位;其驱动方式为电气驱动式,由无人机主电源直接供电 ,采用直流供电的模式,其中,可以通过调节电源电压的方式控制伺服电机的转速,电压越小转速越低,电压为零时,停止转动,此时机械臂将停止工作,处于承重状态;与机械臂不同的是,操作杆前端的圆柱形工作台可通过前臂的私服电机进行三百六十度旋转操作,确保工作台的工具被精准定位至排故点。
11、优选地,操作工具包括电工钳、小型活动扳手、平口螺丝刀、十字螺丝刀、电笔和电动镊子。
12、优选地,上述一种智能无人机巡检装置的巡检方法,包括以下步骤:
13、s1,摄像头模块通过红外与超声波的综合探测,精准定位故障目标;通过智能算法程序,对目标进行立体化呈现,并将图形传输至控制端,同时该智能算法能进行简单的故障排除分析,综合评估故障状况,并预测未来故障走势,同时提出相关建议,供操作员参考;摄像头模块采用深度图像tof三维立体成像法,通过运用tof高清相机中的下的脉冲发射器给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行时间来得到目标物距离;
14、s2,通过机械臂模块近距离抓取输电线路中所存在的异物,并将其置于安全区域,伸展时进行抓取与修理工作,缩回时充当无人机站架;通过圆柱形转动控制器转动火焰喷射器模块,对不同距离和角度的高空悬挂异物进行喷射焚烧;
15、s3,通过万向操作杆模块对输电线路中存在的复杂故障进行排故;电工钳,用于清理铁塔传感器上的断裂裸露线头;小型活动扳手用于固定铁塔装置的螺帽;平口螺丝刀用于装卸传感器设备;十字螺丝刀用于装卸传感器设备;电笔通过连接无人机内的微型传感器,可获取直观的电流电压信息;电动镊子用于夹取微型目标物。
16、本发明的有益效果为:
17、本装置通过加装智能高清摄像头、智能机械臂、智能长距喷火器、多功能万向操作杆,对无人机所具备的功能进行质的提升,使得无人机在电力巡检上发挥更大的优势,增强无人机的可靠性,挖掘无人机的装备潜能,充分体现了无人机的功能多样化、集成化、智能化的发展趋势;该无人机采用可变形式的设计理念,目的在于增加其部分部件的功能,使整个装置能适应不同的复杂巡检环境,执行更多艰巨的巡检任务,使其装备潜能达到最大化。同时,该装置也采用模块化设计,将无人机的平台和机载设备进行整体设计,使无人机不满足于单一巡检功能,将装备载荷模块化组合,可以达到同一平台无人机与具体的巡检要求相适应的效果,从而大大提高巡检效率。
- 还没有人留言评论。精彩留言会获得点赞!