一种两段翼仿鸟扑翼飞行器的制作方法
本技术涉及扑翼飞行,特别是涉及一种两段翼仿鸟扑翼飞行器。
背景技术:
1、扑翼式飞行器是一种模仿鸟类和昆虫飞行、基于仿生学原理设计制造的新型飞行器。相比于旋翼、固定翼飞行器,扑翼机器人具有易操控、可靠性高、隐蔽性强、噪声小等优点,在军用和民用领域有更广阔的应用前景。目前针对大型飞鸟的仿生扑翼飞行器主要采用两段翼构型。相比于单段翼,两段翼的扑翼能有更好的气动布局以及扑动性能,飞行稳定性以及飞行效率更佳,也更接近自然界的鸟类扑动特性。
2、大型仿鸟扑翼飞行器大多采用单自由度扑动的方式,产生的升力和推力较小。多自由度的扑翼飞行器能实现扑动、扭转、折叠等飞行方式,相较单自由度扑翼飞行器在机动性、气动效率上有巨大优势。但现有的多自由度的扑翼飞行器在姿态控制能力及结构灵活性上相对不足。专利cn 205931253u提供了一种仿生扑翼飞行器,涉及一种两段翼的扑翼机构,通过翅膀外端的舵机带动翅膀俯仰及扭转运动,然而仅凭翅膀俯仰,对扑翼飞行器机身的俯仰角影响较小,不利于控制飞行姿态。
技术实现思路
1、本实用新型要解决的技术问题是:现有的扑翼飞行器在姿态控制能力及结构灵活性上相对不足。
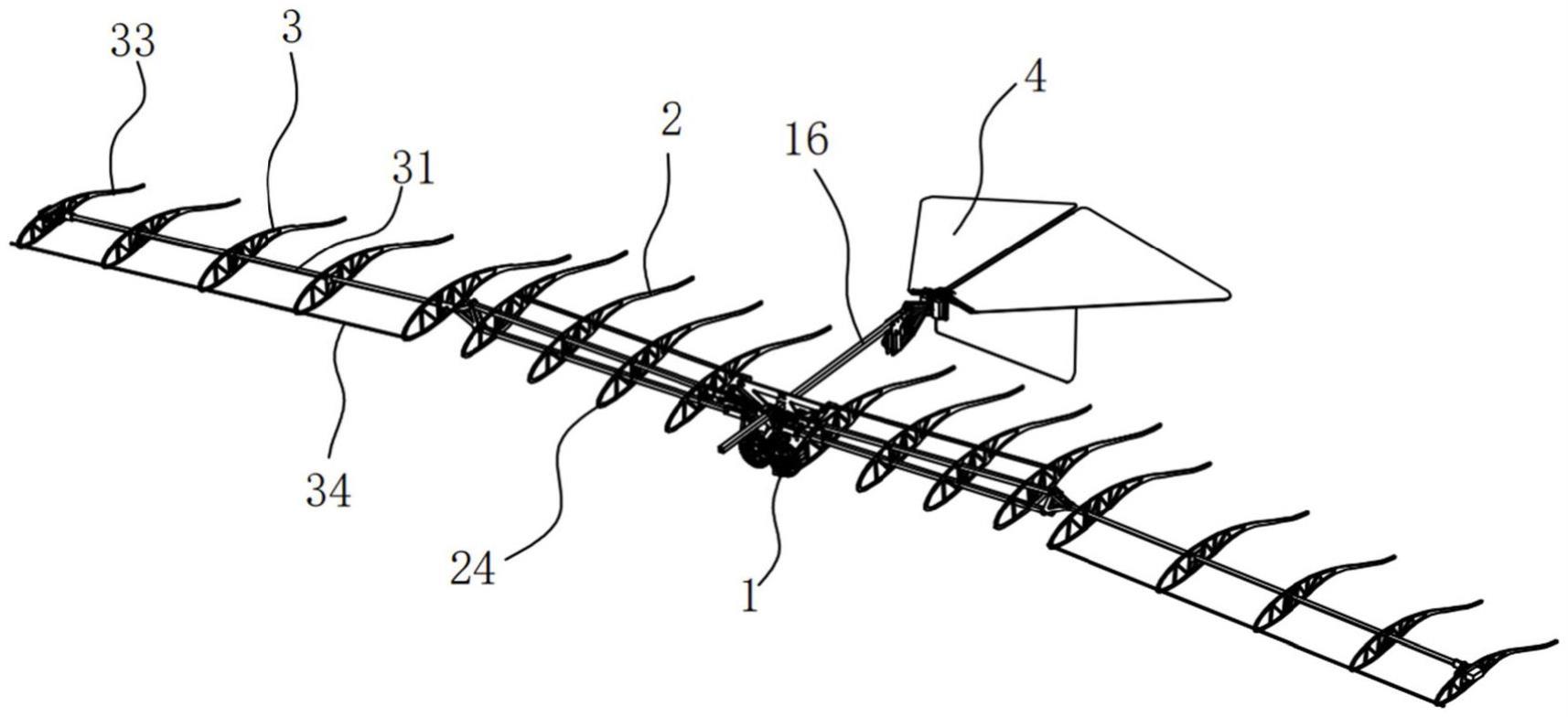
2、为了解决上述技术问题,本实用新型提供了一种两段翼仿鸟扑翼飞行器,其包括机身、一对内翼、一对外翼以及尾翼;所述机身设有驱动机构,所述机身尾部设有尾舵机;两个所述内翼关于所述机身相对称,所述内翼包括曲柄连杆机构和四连杆机构,所述曲柄连杆机构和所述四连杆机构铰接于所述机身,所述四连杆机构与所述曲柄连杆机构相连,所述驱动机构驱动所述曲柄连杆机构旋转,所述四连杆机构随所述曲柄连杆机构旋转而做往复摇摆运动;两个所述外翼关于所述机身相对称,所述外翼包括外杆、外舵机和多个外翼肋,所述外杆的一端与所述四连杆机构相固定,所述外杆的另一端与外舵机相连,所述外杆穿过所述外翼肋,所述外舵机驱动所述外翼肋相对所述外杆扭转;所述尾翼与所述尾舵机相连,所述尾舵机驱动所述尾翼上下摆动。
3、进一步地,所述尾翼包括尾杆、安装座、一对旋转舵机和一对舵面,所述尾杆的一端与所述尾舵机相连,所述尾杆的另一端与所述安装座相连,所述旋转舵机安装于所述安装座,所述舵机与所述舵面一一对应,所述舵机驱动所述舵面旋转。
4、进一步地,所述机身设有限位件,所述限位件设有弧形的镂空孔,所述尾杆设有限位柱,所述限位柱穿过所述镂空孔,所述尾舵机与所述限位柱相连且驱动所述限位柱沿镂空孔滑动。
5、进一步地,所述尾翼还包括垂尾,所述垂尾位于两个舵面之间,所述垂尾的板面垂直于水平面。
6、进一步地,所述舵面的旋转轴与所述尾杆同向,所述旋转舵机驱动所述舵面朝所述垂尾的板面来回翻转。
7、进一步地,所述外翼肋沿所述外杆的长度方向分布,且所述外翼肋的体积朝所述外舵机的方向逐个缩小。
8、进一步地,所述外翼肋沿所述外杆的长度方向分布,相邻两个外翼肋的间距朝所述外舵机的方向逐个缩小。
9、进一步地,所述外翼还包括传动杆,所述传动杆串联多个所述外翼肋,且所述传动杆的长度方向与所述外杆的长度方向平行。
10、进一步地,所述内翼包括固定杆和多个内翼肋,所述内翼肋沿所述四连杆机构的长度方向间隔分布,所述固定杆穿过多个所述内翼肋,且所述固定杆的长度方向与所述四连杆机构的长度方向平行。
11、进一步地,所述机身包括支架和主杆,所述主杆穿过所述支架,所述主杆沿前后方向延伸,所述尾舵机安装于主杆的尾端,所述驱动机构安装于所述支架。
12、本实用新型实施例一种两段翼仿鸟扑翼飞行器与现有技术相比,其有益效果在于:增加可以俯仰运动的尾翼,配合外翼进行俯仰,更能有效地控制飞行器姿态,提高飞行器的灵活性,适应多变的实际环境,且尾翼可以变化构型、改变俯仰、控制偏航。
技术特征:
1.一种两段翼仿鸟扑翼飞行器,其特征在于,包括:
2.根据权利要求1所述的两段翼仿鸟扑翼飞行器,其特征在于:所述尾翼包括尾杆、安装座、一对旋转舵机和一对舵面,所述尾杆的一端与所述尾舵机相连,所述尾杆的另一端与所述安装座相连,所述旋转舵机安装于所述安装座,所述舵机与所述舵面一一对应,所述舵机驱动所述舵面旋转。
3.根据权利要求2所述的两段翼仿鸟扑翼飞行器,其特征在于:所述机身设有限位件,所述限位件设有弧形的镂空孔,所述尾杆设有限位柱,所述限位柱穿过所述镂空孔,所述尾舵机与所述限位柱相连且驱动所述限位柱沿镂空孔滑动。
4.根据权利要求2所述的两段翼仿鸟扑翼飞行器,其特征在于:所述尾翼还包括垂尾,所述垂尾位于两个舵面之间,所述垂尾的板面垂直于水平面。
5.根据权利要求4所述的两段翼仿鸟扑翼飞行器,其特征在于:所述舵面的旋转轴与所述尾杆同向,所述旋转舵机驱动所述舵面朝所述垂尾的板面来回翻转。
6.根据权利要求1所述的两段翼仿鸟扑翼飞行器,其特征在于:所述外翼肋沿所述外杆的长度方向分布,且所述外翼肋的体积朝所述外舵机的方向逐个缩小。
7.根据权利要求1所述的两段翼仿鸟扑翼飞行器,其特征在于:所述外翼肋沿所述外杆的长度方向分布,相邻两个外翼肋的间距朝所述外舵机的方向逐个缩小。
8.根据权利要求1所述的两段翼仿鸟扑翼飞行器,其特征在于:所述外翼还包括传动杆,所述传动杆串联多个所述外翼肋,且所述传动杆的长度方向与所述外杆的长度方向平行。
9.根据权利要求1所述的两段翼仿鸟扑翼飞行器,其特征在于:所述内翼包括固定杆和多个内翼肋,所述内翼肋沿所述四连杆机构的长度方向间隔分布,所述固定杆穿过多个所述内翼肋,且所述固定杆的长度方向与所述四连杆机构的长度方向平行。
10.根据权利要求1所述的两段翼仿鸟扑翼飞行器,其特征在于:所述机身包括支架和主杆,所述主杆穿过所述支架,所述主杆沿前后方向延伸,所述尾舵机安装于主杆的尾端,所述驱动机构安装于所述支架。
技术总结
本技术涉及扑翼飞行技术领域,公开了一种两段翼仿鸟扑翼飞行器,其包括机身、一对内翼、一对外翼以及尾翼;所述机身设有驱动机构,机身尾部设有尾舵机;两个内翼关于所述机身相对称,内翼包括曲柄连杆机构和四连杆机构,曲柄连杆机构和四连杆机构铰接于所述机身,四连杆机构与所述曲柄连杆机构相连,驱动机构驱动曲柄连杆机构旋转,四连杆机构随曲柄连杆机构旋转而做往复摇摆运动;两个外翼关于所述机身相对称,外翼包括外杆、外舵机和多个外翼肋,外杆的一端与四连杆机构相固定,外杆的另一端与外舵机相连,外杆穿过外翼肋,外舵机驱动外翼肋相对外杆扭转;尾翼与尾舵机相连,尾舵机驱动所述尾翼上下摆动,飞行器更具有灵活性。
技术研发人员:李康宝,邓昕晨,陈欣,张通,杨小牛
受保护的技术使用者:广东粤港澳大湾区黄埔材料研究院
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!