一种高精度电力输送线路无人机巡检装置的制作方法
本发明属于电力输送线路巡检,具体涉及一种高精度电力输送线路无人机巡检装置。
背景技术:
1、线路巡检是有效保证电力输送线路及其设备安全的一项基础工作。通过巡视检查能掌握线路运行状况及周围环境的变化,及时发现设备缺陷和危及线路安全的隐患,提出具体检修意见,以便及时消除缺陷、预防事故发生或将事故限制在最小范围内,从而保证输电线路安全和稳定运行。
2、传统电力输送线路巡检普遍采用人工巡检的方式,并通过巡检人员现场手工纸质记录线路缺陷,然后再人工进行统计,该工作方式存在以下明显缺点:一是部分施工地点危险性高,巡检难度大,例如野外高压输电线路需要定期进行物理特性检查,一般两个杆塔之间的线路长度在200~500m,巡检范围数千米长;二是人工作业存在效率低、不确定性等问题;三是人工巡检需要大量的人力物力,且存在巡检盲区。
3、因此,本发明提供了一种高精度电力输送线路无人机巡检装置,采用无人机巡检,相较于人工巡检均有更高的精度,并且能够应用于人工无法巡检的线路和危险线路,避免了线路巡检的盲区,为线路运维管理提供了有力的辅助工具,推动了输电线路运维的智能化进程
技术实现思路
1、本发明要解决的技术问题是:提供一种高精度电力输送线路无人机巡检装置,以至少解决上述部分技术问题。
2、为实现上述目的,本发明采用的技术方案如下:
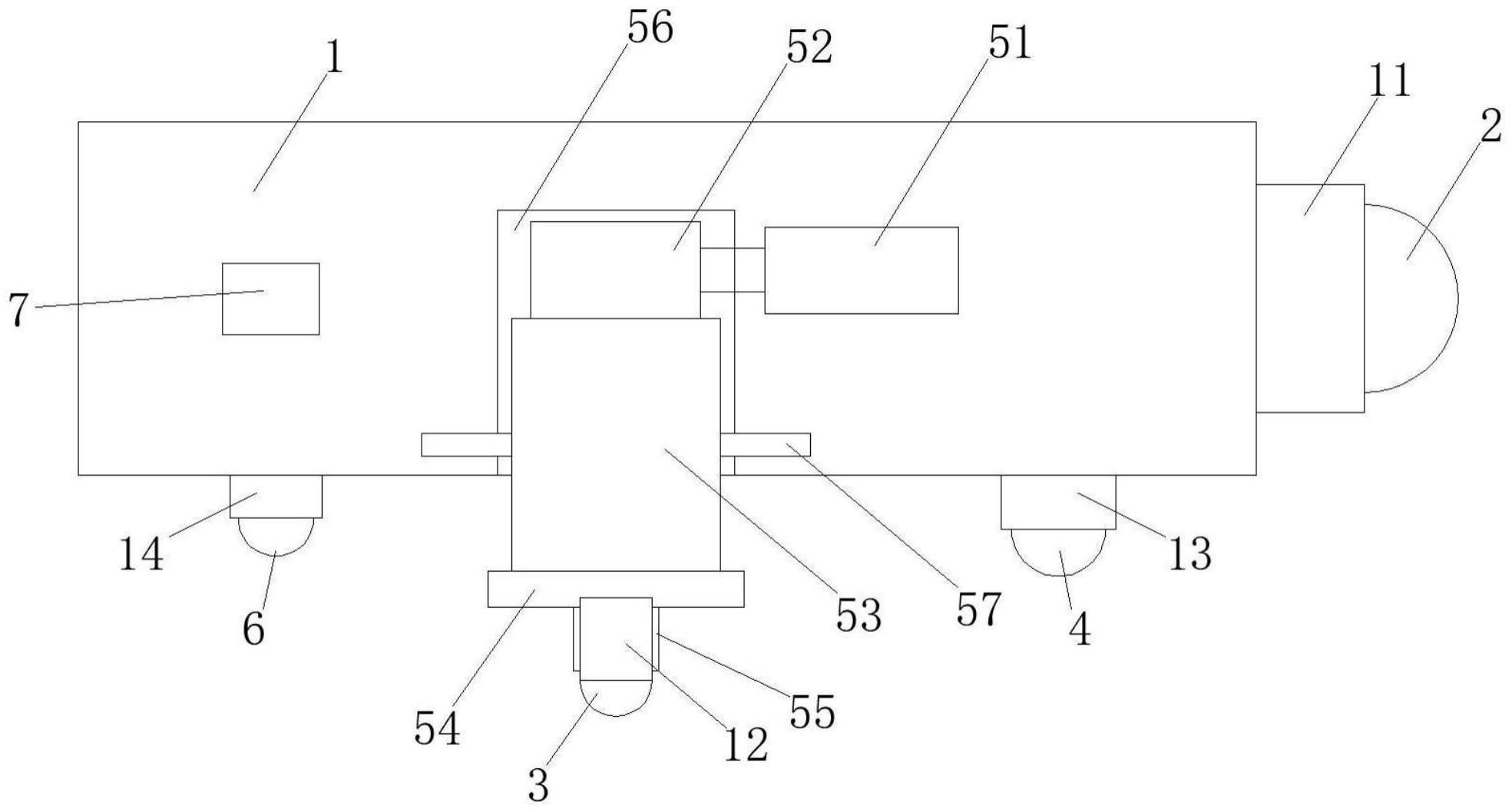
3、一种高精度电力输送线路无人机巡检装置包括无人机,分别设于无人机上的毫米波雷达传感器、激光测距仪、360度全景相机和微处理器,以及设于无人机上并与激光测距仪相连接驱动激光测距仪转动的角度调节机构,所述微处理器分别与毫米波雷达传感器、激光测距仪、360度全景相机和角度调节机构相连接。
4、进一步地,所述无人机上设有第一凸块,毫米波雷达传感器安装于第一凸块前端。
5、进一步地,所述无人机上设有第二凸块,激光测距仪安装于第二凸块上,角度调节机构位于无人机与第二凸块之间。
6、进一步地,所述角度调节机构包括设于无人机底部的第一伺服电机、与第一伺服电机驱动轴相连接的第一啮合齿轮、与第一啮合齿轮相啮合的第二啮合齿轮、设于第二啮合齿轮上的安装板、以及设于安装板上的第二伺服电机,第二凸块安装于第二伺服电机驱动轴上,微处理器分别与第一伺服电机和第二伺服电机相连接。
7、进一步地,所述第二伺服电机驱动轴转动方向与第二啮合齿轮转动方向相互垂直。
8、进一步地,所述无人机底部开设有嵌装槽,第一啮合齿轮和第二啮合齿轮依次嵌装于嵌装槽内并啮合相连,嵌装槽上部设有转轴,第二啮合齿轮固定于转轴上。
9、进一步地,所述第二啮合齿轮部分外露于嵌装槽,安装板位于第二啮合齿轮的外露部分。
10、进一步地,所述无人机上设有第三凸块,360度全景相机安装于第三凸块上。
11、进一步地,所述无人机上设有第四凸块,第四凸块上安装有陀螺仪,陀螺仪与微处理器相连接。
12、进一步地,所述无人机无线连接至地面巡航站。
13、与现有技术相比,本发明具有以下有益效果:
14、本发明结构简单、设计科学合理,使用方便,采用无人机对电力输送线路进行巡检,无人机上匹配有毫米波雷达传感器、激光测距仪和360度全景相机。毫米波雷达传感器用于广泛全面对障碍物进行巡检定位,当发现有障碍物时,调整激光测距仪对障碍物进行精准定位,同时测定障碍物大小,再近距离采用360度全景相机对障碍物进行视频拍摄,进而形成集声、像、位的障碍物全信息,再将所述信息传输至地面巡航站,地面巡航站统一安排排障作业。本发明还根据陀螺仪提供的方位信息控制角度调节机构运行,进而使激光测距仪对准障碍物,从而提高巡检的精度与准确性。
技术特征:
1.一种高精度电力输送线路无人机巡检装置,其特征在于,包括无人机(1),分别设于无人机(1)上的毫米波雷达传感器(2)、激光测距仪(3)、360度全景相机(4)和微处理器(7),以及设于无人机(1)上并与激光测距仪(3)相连接驱动激光测距仪(3)转动的角度调节机构,所述微处理器(7)分别与毫米波雷达传感器(2)、激光测距仪(3)、360度全景相机(4)和角度调节机构相连接。
2.根据权利要求1所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述无人机(1)上设有第一凸块(11),毫米波雷达传感器(2)安装于第一凸块(11)前端。
3.根据权利要求1所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述无人机(1)上设有第二凸块(12),激光测距仪(3)安装于第二凸块(12)上,角度调节机构位于无人机(1)与第二凸块(12)之间。
4.根据权利要求3所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述角度调节机构包括设于无人机(1)底部的第一伺服电机(51)、与第一伺服电机(51)驱动轴相连接的第一啮合齿轮(52)、与第一啮合齿轮(52)相啮合的第二啮合齿轮(53)、设于第二啮合齿轮(53)上的安装板(54)、以及设于安装板(54)上的第二伺服电机(55),第二凸块(12)安装于第二伺服电机(55)驱动轴上,微处理器(7)分别与第一伺服电机(51)和第二伺服电机(55)相连接。
5.根据权利要求4所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述第二伺服电机(55)驱动轴转动方向与第二啮合齿轮(53)转动方向相互垂直。
6.根据权利要求4所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述无人机(1)底部开设有嵌装槽(56),第一啮合齿轮(52)和第二啮合齿轮(53)依次嵌装于嵌装槽(56)内并啮合相连,嵌装槽(56)上部设有转轴(57),第二啮合齿轮(53)固定于转轴(57)上。
7.根据权利要求6所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述第二啮合齿轮(53)部分外露于嵌装槽(56),安装板(54)位于第二啮合齿轮(53)的外露部分。
8.根据权利要求1所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述无人机(1)上设有第三凸块(13),360度全景相机(4)安装于第三凸块(13)上。
9.根据权利要求1所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述无人机(1)上设有第四凸块(14),第四凸块(14)上安装有陀螺仪(6),陀螺仪(6)与微处理器(7)相连接。
10.根据权利要求1所述的一种高精度电力输送线路无人机巡检装置,其特征在于,所述无人机(1)无线连接至地面巡航站。
技术总结
本发明公开了一种高精度电力输送线路无人机巡检装置,属于电力输送线路巡检技术领域,所述装置包括无人机,分别设于无人机上的毫米波雷达传感器、激光测距仪、360度全景相机和微处理器,以及设于无人机上并与激光测距仪相连接驱动激光测距仪转动的角度调节机构,所述微处理器分别与毫米波雷达传感器、激光测距仪、360度全景相机和角度调节机构相连接。本发明通过巡检定位、精准定位、障碍物大小测定、近距离视频采集,形成集声、像、位的障碍物全信息,提高巡检的精度与准确性,并且便于地面巡航站统一安排排障作业。
技术研发人员:李铭,林强,方亮,吴芳,罗海军,龙兴明
受保护的技术使用者:成都亿成科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!