一种基于相对轨道根数的绕飞编队应急撤离制导方法与流程
本发明属于航天器制导控制设计领域,涉及一种基于相对轨道根数的绕飞编队应急撤离制导方法。
背景技术:
1、航天器长时间绕飞编队是完成对地干涉成像、高精度重力场测量等任务的前提条件,由于导航敏感器、执行机构等单机可能会出现故障,或者由于编队构型维持速度脉冲执行误差较大,使得可能出现碰撞风险,此时需要进行应急撤离。工程上对于涉及到航天器相对运动的撤离主要采用三种方式:1.设计好固定大小的撤离速度脉冲,效果依赖人工设计经验,需要花费大量时间和精力,结合飞行工况仿真进行试凑,一旦编队构型有变化,则需要重新进行设计;2.地面根据实际飞行情况计算好后通过指令上行发送撤离速度脉冲,需要提前合理安排时间,确保地面站可见性,无法处理碰撞规避等突发状况;3.采用cw制导,需要指定固定的转移时间、终端相对位置和相对速度,通过cw方程计算并施加两次脉冲,而与第1种方式类似,转移时间、终端相对位置和相对速度同样需要试凑,缺少对不同编队构型的适应性。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出一种基于相对轨道根数的绕飞编队应急撤离制导方法。
2、本发明解决技术的方案是:
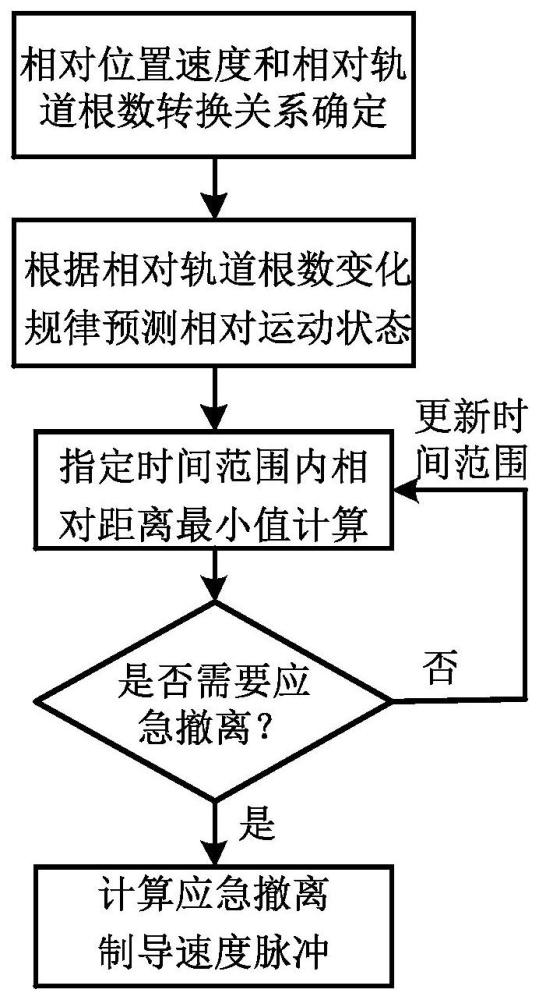
3、一种基于相对轨道根数的绕飞编队应急撤离制导方法,该方法的步骤包括:
4、(1)根据主航天器轨道坐标系和从航天器轨道坐标系的定义,确定从航天器和主航天器相对位置速度以及相对轨道根数的转换关系;
5、(2)根据相对位置速度和相对轨道根数的转换关系,结合相对轨道根数变化规律预测任意时刻从航天器和主航天器相对运动状态;
6、(3)根据预测的相对运动状态,计算指定时间范围内从航天器和主航天器相对距离最小值;
7、(4)根据相对距离最小值,判断是否需要应急撤离,若需要,则计算应急撤离制导速度脉冲,若不需要,则更新时间范围并返回步骤(3)。
8、优选的,所述步骤(1)中,确定从航天器和主航天器相对位置速度、相对轨道根数的转换关系的方法为:
9、主航天器轨道坐标系定义如下:原点oo为主航天器质心,oozo轴指向地球的质心;ooyo轴垂直于oozo轴,指向轨道角速度的负方向;ooxo轴与oozo、ooyo轴构成右手坐标系;
10、从航天器轨道坐标系定义如下:原点od为从航天器质心,odzd轴指向地球的质心;odyd轴垂直于odzd轴,指向轨道角速度的负方向;odxd轴与odzd、odyd轴构成右手坐标系;
11、设在编队飞行过程中,从航天器施加轨控速度脉冲,主航天器始终处于自由运动状态;设当前时刻为t,从航天器相对主航天器的相对轨道根数分别为相对半长轴δa(t)、相对偏心率矢量x向分量δex(t)、相对偏心率矢量y向分量δey(t)、相对倾角矢量x向分量δix(t)、相对倾角矢量y向分量δiy(t)、相对经度δλ(t),则在编队飞行过程中,主航天器轨道坐标系下从航天器相对主航天器的三轴位置(x(t),y(t),z(t))和速度表示为:
12、
13、其中,a(t)为主航天器的轨道半长轴,u(t)为主航天器的平轨道幅角,n(t)为主航天器的轨道角速度。
14、优选的,δa(t)=ad(t)-a(t),δix(t)=id(t)-i(t),δiy(t)=(ωd(t)-ω(t))sini(t),δλ(t)=ud(t)-u(t)+(ωd(t)-ω(t))cosi(t),ex(t)=e(t)cosω(t),ey(t)=e(t)sinω(t),其中,ad(t)和a(t)分别为从航天器和主航天器的轨道半长轴,id(t)和i(t)分别为从航天器和主航天器的轨道倾角,ωd(t)和ω(t)分别为从航天器和主航天器的轨道升交点赤经,ud(t)和u(t)分别为从航天器和主航天器的平轨道幅角,ed(t)和e(t)分别为从航天器和主航天器的轨道偏心率,ωd(t)和ω(t)分别为从航天器和主航天器的轨道近地点幅角。
15、优选的,ud(t)=ωd(t)+md(t),u(t)=ω(t)+m(t),md(t)和m(t)分别为从航天器和主航天器的平近点角,ωd(t)和ω(t)分别为从航天器和主航天器的轨道近地点幅角。
16、优选的,所述步骤(2)中预测相对运动状态的具体方法为:
17、考虑地球引力摄动影响,t时刻相对轨道根数变化满足如下规律:
18、
19、其中,γ(t)表示变化速率相关项,i(t)为主航天器的轨道倾角;
20、待预测时刻为tpred,则tpred时刻从航天器相对主航天器的相对轨道根数δa(tpred)、δex(tpred)、δey(tpred)、δix(tpred)、δiy(tpred)、δλ(tpred)满足
21、
22、其中,δa(tpred)为tpred时刻的相对半长轴,δex(tpred)为tpred时刻的相对偏心率矢量x向分量,δey(tpred)为tpred时刻的相对偏心率矢量y向分量,δix(tpred)为tpred时刻的相对倾角矢量x向分量,δiy(tpred)为tpred时刻的相对倾角矢量y向分量,δλ(tpred)为tpred时刻的相对经度;δa(t)为t时刻的相对半长轴,δex(t)为t时刻的相对偏心率矢量x向分量,δey(t)为t时刻的相对偏心率矢量y向分量,δix(t)为t时刻的相对倾角矢量x向分量,δiy(t)为t时刻的相对倾角矢量y向分量,δλ(t)为t时刻的相对经度;
23、根据tpred时刻的相对轨道根数和步骤(1)得到的相对位置速度和相对轨道根数转换关系,得到tpred时刻主航天器轨道坐标系下从航天器相对主航天器的三轴位置x(tpred)、y(tpred)、z(tpred)和速度x(tpred)、y(tpred)、z(tpred),表示为
24、
25、其中,u(t)为t时刻的主航天器的平轨道幅角。
26、优选的,j2为引力摄动系数,re为地球平均赤道半径;e(t)为主航天器的轨道偏心率。
27、优选的,所述步骤(3)中,设指定时间范围为[tleft,tright],则计算[tleft,tright]范围内的相对距离最小值流程如下:
28、1)设定搜索步长n+1为设定的搜索点数目;
29、2)对k=0,1,2,...,n,依次取tpred=tleft+kδt,计算tpred时刻主航天器轨道坐标系下从航天器相对主航天器的三轴位置x(tpred)、y(tpred)、z(tpred)和速度计算tpre时刻从航天器与主航天器的相对距离
30、
31、3)取n+1个d(tpred)中的最小值,记为dmin,dmin即为[tleft,tright]范围内的相对距离最小值。
32、优选的,所述步骤(4)的实现方法如下:
33、1)若预测的相对距离过近,即dmin<dlim,其中dlim为设定的从航天器和主航天器之间允许的最小相对距离,或者从航天器诊断出单机出现故障,则需进行应急撤离;
34、从航天器判断当前时刻主航天器轨道坐标系下从航天器相对主航天器的位置z(t)是否满足|z(t)|>zlim,其中zlim为设定的z向最小相对距离,若不满足,则从航天器继续飞行,若满足,则计算从航天器应急撤离制导速度脉冲;
35、2)若预测的相对距离大于阈值,即dmin>dlim,或者没有故障情况发生,则不需要进行应急撤离,更新时间范围并返回步骤(3),重新计算指定时间范围内的相对距离最小值。
36、优选的,所述步骤1)中,当前时刻t从航天器施加的应急撤离制导速度脉冲δv(t)满足:
37、
38、其中,δvx(t)、δvy(t)和δvz(t)为δv(t)在从航天器轨道坐标系下的三轴分量,a(t)为主航天器的轨道半长轴,n(t)为主航天器的轨道角速度,ud(t)为从航天器的平轨道幅角,δex(t)为从航天器相对主航天器的相对偏心率矢量x向分量、δey(t)为从航天器相对主航天器的相对偏心率矢量y向分量;ud(t)为当前时刻从航天器的轨道平幅角。
39、优选的,ud(t)=ωd(t)+md(t),ωd(t)和md(t)分别为当前时刻从航天器的轨道近地点幅角和平近点角。
40、本发明与现有技术相比的有益效果是:
41、(1)本发明所提根据相对轨道根数变化规律预测相对状态方法以已知的相对轨道根数取值和轨道动力学特性为出发点,避免直接通过数值积分预测绝对轨道根数相减方式带来的较大计算误差;
42、(2)本发明直接根据轨道运动特性,获取相对运动位置速度和相对轨道根数之间的关系,解析预测相对运动进行并直接在线计算出应急撤离速度脉冲,便于星上灵活处理碰撞规避等突发状况。
43、(3)本发明所提应急撤离制导脉冲方法不受编队构型限制,且只需要单次脉冲即可保证撤离效果,设计思路灵活,便于工程实现。
- 还没有人留言评论。精彩留言会获得点赞!