混合动力航空器的能源回收方法及相关装置与流程
本技术涉及航空器,尤其涉及一种混合动力航空器的能源回收方法及相关装置。
背景技术:
1、随着人类对保护环境的意识不断提高,及能源危机越来越严重,发展新能源飞机是一个必然趋势,其中,电是清洁能源是首选方案。目前电池的能量密度相对较低,而航空器的载荷对重量要求十分严苛,就现状而言要想增加续航里程就必须增加电池的重量与体积,这是飞机无法接受的。能源如何在油与电之间找到一个平衡点,这就诞生了油电混合动力系统。但是,目前混合动力航空器仅有能量控制策略的权衡研究,并没有能源回收的实现方案。
技术实现思路
1、本技术提供一种混合动力航空器的能源回收方法及相关装置,以解决现有航空器技术中没有能源回收的实现方案的技术问题。
2、第一方面,提供一种混合动力航空器的能源回收方法,所述能源回收方法包括:
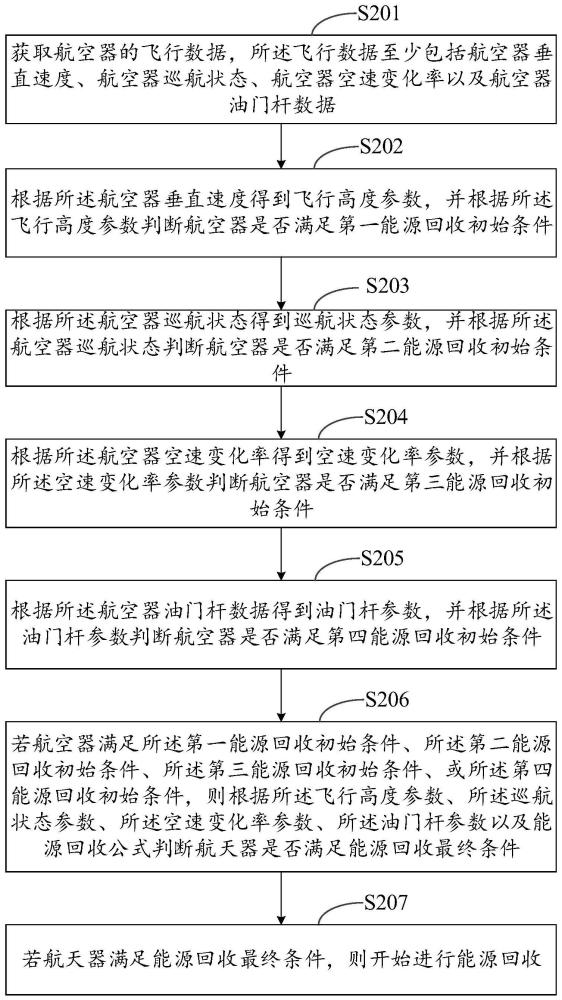
3、获取航空器的飞行数据,所述飞行数据至少包括航空器垂直速度、航空器巡航状态、航空器空速变化率以及航空器油门杆数据;
4、根据所述航空器垂直速度得到飞行高度参数,并根据所述飞行高度参数判断航空器是否满足第一能源回收初始条件;
5、根据所述航空器巡航状态得到巡航状态参数,并根据所述航空器巡航状态判断航空器是否满足第二能源回收初始条件;
6、根据所述航空器空速变化率得到空速变化率参数,并根据所述空速变化率参数判断航空器是否满足第三能源回收初始条件;
7、根据所述航空器油门杆数据得到油门杆参数,并根据所述油门杆参数判断航空器是否满足第四能源回收初始条件;
8、若航空器满足所述第一能源回收初始条件、所述第二能源回收初始条件、所述第三能源回收初始条件、或所述第四能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件;
9、若航空器满足能源回收最终条件,则开始进行能源回收。
10、结合第一方面,在一种可能的实现方式中,所述根据所述航空器垂直速度得到飞行高度参数,并根据所述飞行高度参数判断航空器是否满足第一能源回收初始条件的步骤,包括:根据所述航空器垂直速度进行航空器飞行高度的判断,并得到飞行高度参数;对航空器进行飞行阶段判断,并得到飞行阶段参数,所述飞行阶段至少包括下降阶段、进近阶段、着陆阶段中的一个;基于所述飞行高度参数、所述飞行阶段参数,执行所述若航空器满足所述第一能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤。
11、结合第一方面,在一种可能的实现方式中,所述根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤,包括:根据所述飞行高度参数、所述飞行阶段参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件。
12、结合第一方面,在一种可能的实现方式中,所述根据所述航空器空速变化率得到空速变化率参数,并根据所述空速变化率参数判断航空器是否满足第三能源回收初始条件的步骤,包括:根据所述航空器空速变化率进行航空器飞行速度的判断,并得到空速变化率参数;对航空器进行空速变化时长判断,并得到空速变化时长参数;基于所述空速变化率参数、所述空速变化时长参数,执行所述若航空器满足第三能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤。
13、结合第一方面,在一种可能的实现方式中,所述根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤,包括:根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述空速变化时长参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件。
14、结合第一方面,在一种可能的实现方式中,所述根据所述航空器油门杆数据得到油门杆参数,并根据所述油门杆参数判断航空器是否满足第四能源回收初始条件的步骤,包括:根据所述航空器油门杆数据进行航空器油门杆变化率的判断,并得到油门杆参数;对航空器进行油门杆位置判断,并得到油门杆位置参数;基于所述油门杆参数、所述油门杆位置参数,执行所述若航空器满足所述第四能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤。
15、结合第一方面,在一种可能的实现方式中,所述根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤,包括:根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数、所述油门杆位置参数以及能源回收公式判断航空器是否满足能源回收最终条件。
16、第二方面,提供一种混合动力航空器的能源回收装置,所述能源回收装置包括:
17、数据获取模块,用于获取航空器的飞行数据,所述飞行数据至少包括航空器垂直速度、航空器巡航状态、航空器空速变化率以及航空器油门杆数据;
18、第一判断模块,用于根据所述航空器垂直速度得到飞行高度参数,并根据所述飞行高度参数判断航空器是否满足第一能源回收初始条件;
19、第二判断模块,用于根据所述航空器巡航状态得到巡航状态参数,并根据所述航空器巡航状态判断航空器是否满足第二能源回收初始条件;
20、第三判断模块,用于根据所述航空器空速变化率得到空速变化率参数,并根据所述空速变化率参数判断航空器是否满足第三能源回收初始条件;
21、第四判断模块,用于根据所述航空器油门杆数据得到油门杆参数,并根据所述油门杆参数判断航空器是否满足第四能源回收初始条件;
22、第五判断模块,用于若航空器满足所述第一能源回收初始条件、所述第二能源回收初始条件、所述第三能源回收初始条件、或所述第四能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件;
23、能源回收模块,用于若航空器满足能源回收最终条件,则开始进行能源回收。
24、结合第二方面,在一种可能的实现方式中,所述第一判断模块具体用于:根据所述航空器垂直速度进行航空器飞行高度的判断,并得到飞行高度参数;对航空器进行飞行阶段判断,并得到飞行阶段参数,所述飞行阶段至少包括下降阶段、进近阶段、着陆阶段中的一个;基于所述飞行高度参数、所述飞行阶段参数,执行所述若航空器满足所述第一能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤。
25、结合第二方面,在一种可能的实现方式中,所述第五判断模块具体用于:根据所述飞行高度参数、所述飞行阶段参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件。
26、结合第二方面,在一种可能的实现方式中,所述第三判断模块具体用于:根据所述航空器空速变化率进行航空器飞行速度的判断,并得到空速变化率参数;对航空器进行空速变化时长判断,并得到空速变化时长参数;基于所述空速变化率参数、所述空速变化时长参数,执行所述若航空器满足第三能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤。
27、结合第二方面,在一种可能的实现方式中,所述第五判断模块具体还用于:根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述空速变化时长参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件。
28、结合第二方面,在一种可能的实现方式中,所述第四判断模块具体用于:根据所述航空器油门杆数据进行航空器油门杆变化率的判断,并得到油门杆参数;对航空器进行油门杆位置判断,并得到油门杆位置参数;基于所述油门杆参数、所述油门杆位置参数,执行所述若航空器满足所述第四能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件的步骤。
29、结合第二方面,在一种可能的实现方式中,所述第五判断模块具体还用于:根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数、所述油门杆位置参数以及能源回收公式判断航空器是否满足能源回收最终条件。
30、第三方面,提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如第一方面所述的混合动力航空器的能源回收方法。
31、第四方面,提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如第一方面所述的混合动力航空器的能源回收方法。
32、本技术可以实现如下有益效果:一种混合动力航空器的能源回收方法,包括:获取航空器的飞行数据,所述飞行数据至少包括航空器垂直速度、航空器巡航状态、航空器空速变化率以及航空器油门杆数据;根据所述航空器垂直速度得到飞行高度参数,并根据所述飞行高度参数判断航空器是否满足第一能源回收初始条件;根据所述航空器巡航状态得到巡航状态参数,并根据所述航空器巡航状态判断航空器是否满足第二能源回收初始条件;根据所述航空器空速变化率得到空速变化率参数,并根据所述空速变化率参数判断航空器是否满足第三能源回收初始条件;根据所述航空器油门杆数据得到油门杆参数,并根据所述油门杆参数判断航空器是否满足第四能源回收初始条件;若航空器满足所述第一能源回收初始条件、所述第二能源回收初始条件、所述第三能源回收初始条件、或所述第四能源回收初始条件,则根据所述飞行高度参数、所述巡航状态参数、所述空速变化率参数、所述油门杆参数以及能源回收公式判断航空器是否满足能源回收最终条件;若航空器满足能源回收最终条件,则开始进行能源回收。本技术通过获取航空器垂直速度、航空器巡航状态、航空器空速变化率以及航空器油门杆数据,能够全面获取到航空器各种状态下的数据,提升能源回收的全面性;通过第一能源回收初始条件、第二能源回收初始条件、第三能源回收初始条件、第四能源回收初始条件以及能源回收最终条件,不仅能够对各种数据对应的航空器状态进行是否满足能量回收的判断,还能够对航空器整体状态进行判断,提升能源回收的准确性与全面性。
- 还没有人留言评论。精彩留言会获得点赞!