一种变拓扑结构的三轴气浮转台自适应调平方法与流程
本发明属于航空航天,特别是涉及一种变拓扑结构的三轴气浮转台自适应调平方法。
背景技术:
1、三轴气浮转台通过气浮球轴承实现近似无摩擦的系统来模拟太空失重环境,一方面可以有效地减少数字模型带来的误差影响,另一方面通过搭建与卫星系统相同的信号链路,既可以直观地反映系统设计和软件算法中存在的问题,又可以充分验证sada、天线等的挠性部件对卫星的影响,还可以验证推进组件、控制力矩陀螺等新研部组件的功能和性能。
2、三轴气浮转台需要通过调平衡装置将质心调节到旋转中心以消除重力带来的干扰力矩,因此自动调平衡技术是当前研究的热点。
3、有研究人员提出基于复摆模型的自动调平衡方法,也有研究人员利用辨识和滤波算法对转台质心、转动惯量、干扰力矩进行估计和补偿,从而对转台参数进行精确辨识和补偿。两种方法都是动态采集、计算质心调整量,静态调整质量滑块,调整后不再对转台施加作用,无法解决随姿态变化产生的其它干扰力矩的影响。
4、针对以上问题有研究人员采用基于转台实时状态闭环反馈控制调平衡方法,算法不基于模型参数,容易实现,但容易引入测量噪声,算法精度差;同时有研究人员提出基于飞轮角动量测量的干扰力矩评估和调平方法,用飞轮的角动量积累评估对应轴向的干扰力矩大小,从而得到滑块的调整量,但该方法将三轴解耦计算,在多姿态角度下的调平性能不佳。
技术实现思路
1、本发明目的是为了克服现有技术中的不足之处,提出了一种变拓扑结构的三轴气浮转台自适应调平方法。所述变拓扑结构的三轴气浮转台自适应调平方法,第一步利用实时状态闭环反馈控制进行转台xy轴向粗调平,此阶段要求调平滑台具有更高的响应速度和更大的有效行程;第二步采用自适应动态三轴精调平控制进行实时动态微补偿,此阶段要求调平滑台具有更高的补偿精度。
2、本发明是通过以下技术方案实现的,本发明提出一种变拓扑结构的三轴气浮转台自适应调平方法,所述方法包括以下步骤:
3、步骤一,搭建三轴气浮转台变拓扑结构电气网络;
4、步骤二,基于实时状态闭环反馈控制进行转台xy轴向粗调平;
5、步骤三,采用自适应动态三轴精调平控制进行实时动态微补偿。
6、进一步地,在步骤一中,在三轴气浮转台台面上布局转台角度/角速度测量机构、中心控制计算机、三套电机驱动机构和飞轮驱动器;在xy轴向布置两台皮带型调平滑台,在xyz轴向布置三台丝杠型调平滑台,以及在xyz三个轴向各布置一台反作用飞轮。
7、进一步地,在步骤一中,在电机驱动和调平滑台之间增加组合mos管选通开关,通过中心控制计算机输出的组合mos管选通电平控制步进电机和驱动组合连接。
8、进一步地,所述步骤二具体为:
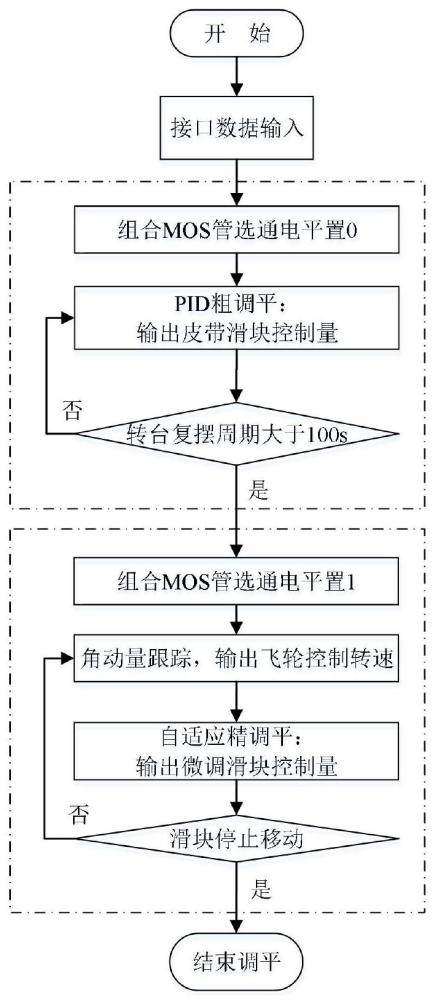
9、步骤二一,通过将组合mos管选通电平置0,使电机驱动与皮带型滑台连接;
10、步骤二二,采集当前三轴气浮转台的角度和角速度信息,并将角速度信息进行差分得到转台旋转角加速度,设置转台期望角度、角速度、角加速度为零,通过中心控制计算机中的pid控制器计算皮带型调平滑台上滑块需要移动的距离,判断转台复摆运行周期,当复摆周期大于100s则进入步骤三,否则循环执行步骤二。
11、进一步地,所述步骤三具体为:
12、步骤三一,通过将组合mos管选通电平置1,使电机驱动与丝杠型调平滑台连接;
13、步骤三二,设定一个期望的角动量跟踪轨迹hd,保证转台持续的机动,为此设计前馈加反馈角动量跟踪控制率;
14、步骤三三,设定转台自适应调节率,从而得到滑台的自适应控制率。
15、进一步地,所述前馈加反馈角动量跟踪控制率如公式(1)所示:
16、
17、式中,k为飞轮反馈控制器参数,h为转台当前角动量,w为转台角速度测量值。
18、进一步地,所述转台自适应调节率如公式(2)所示:
19、
20、其中,m表示转台质量,表示重力加速度在转台坐标系下分量的叉乘矩阵。
21、进一步地,所述滑台的自适应控制率如公式(3)所示:
22、
23、其中,δd=[δdxδdyδdz]t,m1、m2、m3为丝杠滑台上滑块质量,m为转台质量,g为重力加速度常数,γ是自使用控制器参数,为对称正定矩阵。
24、本发明提出一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述一种变拓扑结构的三轴气浮转台自适应调平方法的步骤。
25、本发明提出一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现所述一种变拓扑结构的三轴气浮转台自适应调平方法的步骤。
26、本发明的有益效果:
27、本发明提出的一种变拓扑结构的三轴气浮转台自适应调平方法,即可以实现转台快速、高精度自动调平衡,又可以通过减少转台的硬件配置,节约成本、降低台面空间占用率。
技术特征:
1.一种变拓扑结构的三轴气浮转台自适应调平方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,在步骤一中,在三轴气浮转台台面上布局转台角度/角速度测量机构、中心控制计算机、三套电机驱动机构和飞轮驱动器;在xy轴向布置两台皮带型调平滑台,在xyz轴向布置三台丝杠型调平滑台,以及在xyz三个轴向各布置一台反作用飞轮。
3.根据权利要求2所述的方法,其特征在于,在步骤一中,在电机驱动和调平滑台之间增加组合mos管选通开关,通过中心控制计算机输出的组合mos管选通电平控制步进电机和驱动组合连接。
4.根据权利要求3所述的方法,其特征在于,所述步骤二具体为:
5.根据权利要求4所述的方法,其特征在于,所述步骤三具体为:
6.根据权利要求5所述的方法,其特征在于,所述前馈加反馈角动量跟踪控制率如公式(1)所示:
7.根据权利要求5所述的方法,其特征在于,所述转台自适应调节率如公式(2)所示:
8.根据权利要求5所述的方法,其特征在于,所述滑台的自适应控制率如公式(3)所示:
9.一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1-8任一项所述方法的步骤。
10.一种计算机可读存储介质,用于存储计算机指令,其特征在于,所述计算机指令被处理器执行时实现权利要求1-8任一项所述方法的步骤。
技术总结
本发明提出一种变拓扑结构的三轴气浮转台自适应调平方法。所述变拓扑结构的三轴气浮转台自适应调平方法,第一步利用实时状态闭环反馈控制进行转台XY轴向粗调平,此阶段要求调平滑台具有更高的响应速度和更大的有效行程;第二步采用自适应动态三轴精调平控制进行实时动态微补偿,此阶段要求调平滑台具有更高的补偿精度。本发明提出的一种变拓扑结构的三轴气浮转台自适应调平方法,即可以实现转台快速、高精度自动调平衡,又可以通过减少转台的硬件配置,节约成本、降低台面空间占用率。
技术研发人员:陈志刚,牟洪元,张羽霄,范林东,陈祥文,戴路,张雷
受保护的技术使用者:长光卫星技术股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!