一种可变构型的螺旋桨系统及其调节方法与流程
本发明属于飞行器,尤其涉及一种可变构型的螺旋桨系统及其调节方法。
背景技术:
1、随着作战环境的演变,兼具直升机垂直起降和固定翼高性能巡航的垂直起降飞行器(vtol)受到了越来越多重视,已经成为近些年新概念飞行器的研发热点。这就要求螺旋桨兼顾垂直起降阶段大推力低速度特性以及平飞巡航阶段小推力高速巡航的特性。但目前现有的垂直起降飞行器普遍存在垂直起降阶段效率低、消耗能量巨大的问题,无法适应实际的飞行需要。
2、现有通用的做法包括改变螺旋桨的桨叶桨距、电机转速等方案,可以一定程度满足拉力调节范围大的难题,但对于系统效率的考虑相对较少。部分研究将重点瞄准了改变螺旋桨的直径,实现不同状态下最优的系统效率。而目前,涉及螺旋桨变直径的专利和文章相对较少。西北工业大学的《cn 105620728a一种能够变桨径桨距的螺旋桨》提出的变桨径方法,相当于将内段桨叶平移外置,桨叶实度增加较小,桨盘载荷变化较小,因而对效率的提升较小。南京航空航天大学的《cn 216332753 u一种可变直径旋翼》提出的变桨径方法,采用单螺杆进行调节,一方面不利于桨叶的移动稳定性,而且不具备系统复制,仅可实现一段调节。
技术实现思路
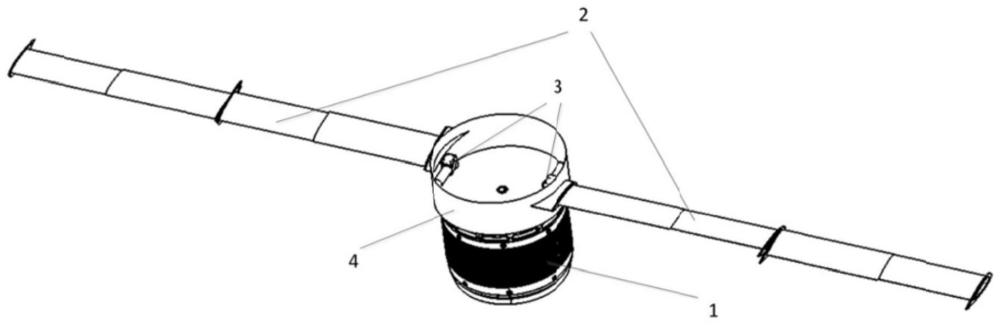
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种可变构型的螺旋桨系统及其调节方法,可在转动过程中动态调节桨叶直径,并可预先分段调节桨叶的桨距,且结构具备快速拓展性,解决垂直起降无人机推力需求变化大、能耗高的问题,满足飞行平台在垂直起降、悬停、平飞巡航阶段的推力和效率需求,应用前景广阔。所述系统包括电机(1)、螺旋桨(2)、舵机(3)和安装盘(4);
2、所述电机(1)与安装盘(4)固连,电机(1)转动时安装盘(4)跟随转动;
3、所述螺旋桨(2)与安装盘(4)固连;
4、所述舵机(3)与安装盘(4)固连,实现电机(1)转动时螺旋桨(2)的转动。
5、所述螺旋桨(2)为单片螺旋桨,包括两节相同结构的桨叶,沿螺旋桨径向向外依次记作第一节桨叶(5)和第二节桨叶(6);
6、所述第一节桨叶(5)包括内段桨叶(51)、外段桨叶(52)和驱动系统(53)。
7、所述内段桨叶(51)为固定桨叶,包括输入轴(511)、固定叶面(512)和根部翼刀(513),其中,所述固定叶面(512)固连在根部翼刀(513)沿展向向外的平面;
8、所述输入轴(511)的根部固有输入轴齿轮(5111)和输入轴轴承(5112),输入轴轴承(5112)外圈内嵌到根部翼刀(513)中,实现输入轴(511)与根部翼刀(513)相对转动。
9、所述外段桨叶(52)为可动桨叶,包括根肋(521)、输出轴(522)、可动叶面(523)和稍部翼刀(524);其中,所述可动叶面(523)分别与稍部翼刀(524)沿展向向内的平面、根肋(521)沿展向向外的平面固连,形成封闭盒段;
10、所述输出轴(522)的稍部固有输出轴轴承(5241),所述输出轴轴承(5241)外圈内嵌到稍部翼刀(524)中;
11、所述输出轴(522)通过输出轴轴承(5241)能够实现相对转动,从而实现输出轴(522)与稍部翼刀(524)相对转动的同时轴向相对静止。
12、所述驱动系统(53)包括螺杆(531)和螺母连接块(532);所述螺杆(531)根部固有螺杆齿轮(5311)和螺杆轴承(5312),轴承外圈内嵌到根部翼刀(513)中,实现螺杆(531)与根部翼刀(513)相对转动;所述螺母连接块(532)螺接在螺杆(531)之上,当螺杆(531)转动时,螺母连接块(532)能够沿螺杆(531)轴向直线运动。
13、所述内段桨叶(51)、外段桨叶(52)通过驱动系统(53)连接。
14、所述外段桨叶(52)的根肋(521)与驱动系统(53)的螺母连接块(532)固连,外段桨叶(52)在驱动系统(53)的作用下实现沿螺杆(531)轴向运动;
15、所述驱动系统(53)的螺杆齿轮(5311)和内段桨叶(51)的输入轴齿轮(5111)之间啮合,驱动输入轴齿轮(5111)带动螺杆齿轮(5311)转动,实现扭矩的传递;其中,螺杆齿轮5311的直径较大,输入轴齿轮5111的直径较小;
16、所述内段桨叶(51)在展长、弦长和厚度尺寸方面均较外段桨叶(52)偏大,内段桨叶(51)在设计上内部空间能够满足外段桨叶(52)嵌入;
17、通过驱动系统(53)实现外段桨叶(52)的径向移动,完成外段桨叶(52)在内段桨叶(51)内部嵌入和推出,从而达成单节桨叶的直径调节;
18、所述内段桨叶(51)的输入轴(511)和外段桨叶(52)的输出轴(522)采用内外花键连接,实现驱动扭矩的传递;
19、所述输出轴(522)直径与输入轴(511)相比较小,能够收缩嵌入输入轴(511)内部或者从内部伸出,与桨叶直径收缩、伸长同步。
20、所述舵机(3)与第一节桨叶(5)的输入轴(511)采用螺钉或销钉固连,实现舵机(4)的扭矩传递;
21、所述第一节桨叶(5)的稍部翼刀(524)前缘中部开有1个通孔,第二节桨叶(6)的根部翼刀(613)前缘开有一批间隔角度的通孔;
22、所述第一节桨叶(5)的稍部翼刀(524)和第二节桨叶(6)的根部翼刀(613)相贴合;
23、旋转第二节桨叶(6),当第一节桨叶稍部翼刀(524)的孔与第二节桨叶根部翼刀(613)的孔重合时,以销钉或者螺钉螺母通过2个通孔将2片桨叶固连,实现力的传递;同时,第一节桨叶(5)的输出轴(522)与第二节桨叶(6)的输入轴(611)采用内嵌法兰连接,实现驱动扭矩的传递。
24、本发明还提供了一种可变构型的螺旋桨系统的调节方法,包括:当无人机处在垂直起降、悬停状态时,无人机系统发出增加螺旋桨直径指令,舵机(3)输出扭矩驱动输入轴(511)转动,通过输入轴齿轮(5111)、螺杆齿轮(5311)的啮合带动螺杆(531)转动,实现螺母连接块(532)和其固连的外段桨叶(52)沿轴向向外运动,完成外段桨叶(52)在内段桨叶(51)内部伸出,从而实现第一节桨叶(5)的直径增加;
25、所述内段桨叶(51)的输入轴(511)和外段桨叶的输出轴(522)采用内外花键配合连接,同时,第一节桨叶(5)的输出轴(522)与第二节桨叶(6)的输入轴(611)采用内嵌法兰连接,实现将舵机(3)的输出扭矩传递到第二节桨叶(6);采用同样的原理实现第二节桨叶(6)的直径增加;
26、当无人机处在平飞巡航状态时,无人机系统发出减小螺旋桨直径指令,舵机(3)输出反向扭矩驱动输入轴(511)反向转动;采用同样的原理实现第一节桨叶(5)和第二节桨叶(6)的直径减小;
27、当第二节桨叶(6)仅保证其根部翼刀(613)不变,但内段桨叶(61)和外段桨叶(62)弦长变小,即能够实现第一节桨叶(5)和第二节桨叶(6)的弦长分段变化,逐节扩展即能够实现螺旋桨(2)沿展向弦长分段调节;
28、该可变构型的螺旋桨系统可根据需要设计为各节长度不同,通过同步改变内段桨叶61和外段桨叶62的长度,可实现第一节桨叶5和第二节桨叶6的长度分段不同,为保持每一节伸缩比例协调一致,每一节驱动系统螺纹的螺距也不同(例如,53驱动系统中螺杆531和螺母连接块532的螺距),每节的长度越长对应螺距越大。通过旋转第二节桨叶(6),在需要的角度以销钉或者螺钉螺母通过2个通孔将2片桨叶固连,因而稍部翼刀(524)和根部翼刀(613)之间能够实现相对角度的分段调节,逐节扩展即能够实现螺旋桨的桨距分段调节。
29、有益效果:本发明的一种可变构型的螺旋桨系统,可预先分段调节螺旋桨的桨距,并可在转动过程中动态调节螺旋桨直径、弦长,满足飞行平台在垂直起降、悬停、平飞巡航阶段的推力和效率需求。该结构具备快速拓展性,显著提升调节效果。可以更好地应用于垂直起降无人机等各种新型飞行器,应用前景广阔。
- 还没有人留言评论。精彩留言会获得点赞!