一种基于气压式力传感的广义力传感器
本发明涉及传感器设计领域,具体涉及一种基于气压式力传感的广义力传感器。
背景技术:
1、传统的旋翼无人机动力系统以电机转速为被控对象进行闭环控制,无法精确控制旋翼无人机的输出升力,现有商用拉力传感器只能测量垂向的升力,高动态负载下结构强度差,无法测量旋翼旋转时产生的高频扭矩;然而直接影响旋翼无人机飞行状态的是旋翼旋转时产生的沿轴向升力和绕轴向的扭矩,因此同时测量升力和扭矩并作为被控对象进行闭环控制能够提高动力系统的控制精度。
技术实现思路
1、本发明技术所解决的问题是:针对传统的旋翼无人机动力系统中升力测量的不足,设计了一种基于气压式力传感的广义力传感器同时测量旋翼产生的升力和扭矩,解决了传统动力反馈系统中无法测量扭矩的问题。
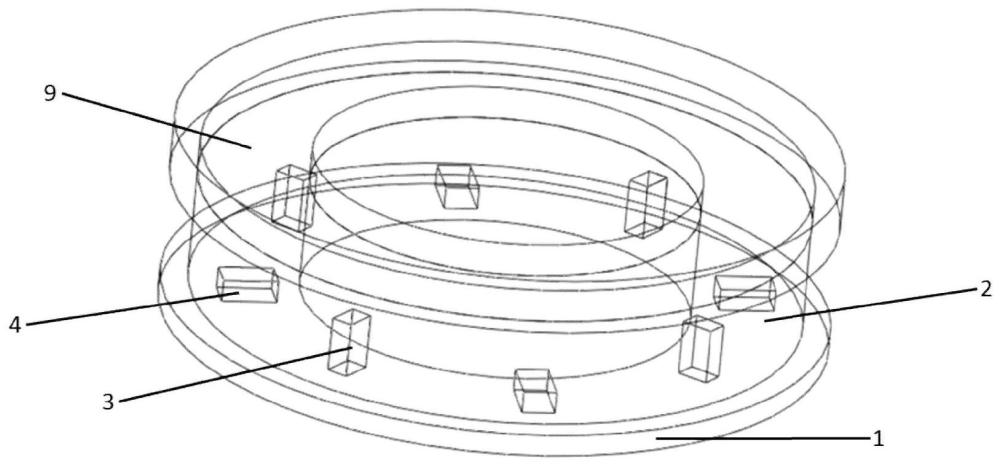
2、一种基于气压式力传感的广义力传感器,通过合理布局八个气压计的位置以达到能够测量升力和扭矩的效果,其中,四个气压计水平放置以测量沿轴向的升力;四个气压计竖直放置以测量绕轴向的扭矩。
3、本发明技术的解决方案为:一种基于气压式力传感的广义力传感器,包括自上而下依次设置的顶部承载板、力传感模块和pcb板;其中:
4、所述顶部承载板,用于承受所施加的力;
5、所述力传感模块,包括橡胶模块、以及设于橡胶模块内部的气压计,所述气压计通过橡胶模块的形变量获取所受力或力矩的大小;
6、所述pcb板,用于设置气压计以及与气压计连接的集成电路。
7、所述顶部承载板用于承受施加在广义力传感器上的力和力矩,并将力和力矩传递至力传感模块。
8、当所述力传感模块受到力或力矩时,橡胶模块产生形变,且橡胶的形变量与所受力或力矩的大小成正比;同时气压计将橡胶的形变量转换为电信号的变化,通过pcb板上的集成电路进行ad采样得到压力adc读数。
9、所述pcb板上设有2n个对称分布的气压计,n为整数且n≥2;2n个气压计以广义力传感器的轴心为中心均匀分布;
10、其中,n个气压计垂直设置,另外n个气压计水平设置;
11、垂直设置的气压计与水平设置的气压计依次交替设置、任意两个气压计之间的间距相等;
12、所述顶部承载板和pcb板平行设置。
13、所述橡胶模块采用聚氨酯橡胶在设有气压计的pcb板上进行浇筑;等待橡胶凝固后,根据橡胶模块的顶部形状,设计具有凹槽的顶部承载板并安装于橡胶模块的顶部,作为广义力传感器的受力面,使受力面所受力或力矩均匀传递至力传感模块;
14、所述橡胶模块在顶部承载板与pcb板之间形成筒状固体,筒壁内设置气压计。
15、所述气压计的开孔内设有压敏膜片。
16、所述集成电路包括ad转换器,用于将气压计输出的模拟信号转换为数字信号并输出。
17、一种基于气压式力传感的广义力传感器测量方法,包括以下步骤:
18、当顶部承载板承受所施加的力,力传感模块受到力或力矩,橡胶模块产生形变,气压计将橡胶的形变量转换为电信号的变化,通过pcb板上的集成电路进行ad采样得到压力adc读数。
19、所述气压计将橡胶的形变量转换为电信号的变化,通过pcb板上的集成电路进行ad采样得到压力adc读数,具体如下:
20、
21、f表示广义力传感器的力测量值,d2表示橡胶模块的外圆半径,d表示橡胶模块的内圆半径,kf表示每单位法向应力对应的气压计读数,通过标定获得;chi表示第i个水平放置气压计的读数;
22、
23、m表示广义力传感器的力矩测量值,km表示每单位切应力对应的气压计读数,通过标定获得;cvi表示第i个竖直放置气压计的读数。
24、与现有技术相比本发明的有益效果:
25、轻量化的结构设计大幅度降低传感器自身的重量,能够有效减小无人机的负载;圆环形橡胶模块的设计允许广义力传感器能够同时测量旋翼无人机产生的升力和扭矩,将该传感器应用到旋翼无人机升力反馈控制系统中能够有效提升系统的控制精度和鲁棒性。
技术特征:
1.一种基于气压式力传感的广义力传感器,其特征在于,包括自上而下依次设置的顶部承载板、力传感模块和pcb板;其中:
2.根据权利要求1所述的一种基于气压式力传感的广义力传感器,其特征在于,所述顶部承载板用于承受施加在广义力传感器上的力和力矩,并将力和力矩传递至力传感模块。
3.根据权利要求1所述的一种基于气压式力传感的广义力传感器,其特征在于,当所述力传感模块受到力或力矩时,橡胶模块产生形变,且橡胶的形变量与所受力或力矩的大小成正比;同时气压计将橡胶的形变量转换为电信号的变化,通过pcb板上的集成电路进行ad采样得到压力adc读数。
4.根据权利要求1所述的一种基于气压式力传感的广义力传感器,其特征在于,所述pcb板上设有2n个对称分布的气压计,n为整数且n≥2;2n个气压计以广义力传感器的轴心为中心均匀分布;
5.根据权利要求1所述的一种基于气压式力传感的广义力传感器,其特征在于,所述顶部承载板和pcb板平行设置。
6.根据权利要求1所述的一种基于气压式力传感的广义力传感器,其特征在于,所述橡胶模块采用聚氨酯橡胶在设有气压计的pcb板上进行浇筑;等待橡胶凝固后,根据橡胶模块的顶部形状,设计具有凹槽的顶部承载板并安装于橡胶模块的顶部,作为广义力传感器的受力面,使受力面所受力或力矩均匀传递至力传感模块;
7.根据权利要求1所述的一种基于气压式力传感的广义力传感器,其特征在于,所述气压计的开孔内设有压敏膜片。
8.根据权利要求1所述的一种基于气压式力传感的广义力传感器,其特征在于,所述集成电路包括ad转换器,用于将气压计输出的模拟信号转换为数字信号并输出。
9.一种基于气压式力传感的广义力传感器测量方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种基于气压式力传感的广义力传感器测量方法,其特征在于,所述气压计将橡胶的形变量转换为电信号的变化,通过pcb板上的集成电路进行ad采样得到压力adc读数,具体如下:
技术总结
本发明涉及传感器设计领域,具体涉及一种基于气压式力传感的广义力传感器,所述的广义力传感器包括顶部承载板、力传感模块和PCB板。其中,顶部承载板作为广义力传感器的受力面,将承受的力传递给力传感模块;力传感模块由聚氨酯橡胶模块和气压计组成,橡胶模块受力会产生形变,气压计将该形变量转换成所受力的大小;PCB板用于广义力传感器的电路设计以实现力的转换和读取。通过合理布局气压计的位置,广义力传感器能够测量施加在Z轴方向的力和绕Z轴的力矩。本发明能够同时测量旋翼无人机产生的升力和扭矩,将该传感器应用到旋翼无人机升力反馈控制系统中能够有效提升系统的控制精度和鲁棒性。
技术研发人员:何玉庆,常彦春,杨丽英,蒋涵,李思梁,黄朝雄
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!