一种无人机停机坪及无人机归中控制方法与流程
本发明涉及无人机停靠设备的,尤其涉及一种无人机停机坪及无人机归中控制方法。
背景技术:
1、无人机在进行远程工作时,需要经常返回无人机机库进行充电蓄能,从而提高无人机的持续远程作业能力。
2、目前,无人机在停靠过程中,存在无人机机翼撞在无人机机库外壳上的情况,会导致无人机受到损伤,不利于维护无人机的使用寿命。由于无人机采用自动化接触感应线圈充电,所以无人机在无人机机库上的停靠精度关系到无人机的充电能效,如果无人机停靠归中精度较差,则会导致充电线圈无法精确对接,导致无人机电池异常发热,并且造成能源浪费。
技术实现思路
1、鉴于上述现有无人机停机坪及无人机归中控制方法存在的问题,提出了本发明。
2、因此,本发明提供一种无人机停机坪及无人机归中控制方法,其目的在于:解决如何让无人机停靠在停靠平台的无人机充电位置,提高无人机入库精度的技术问题。
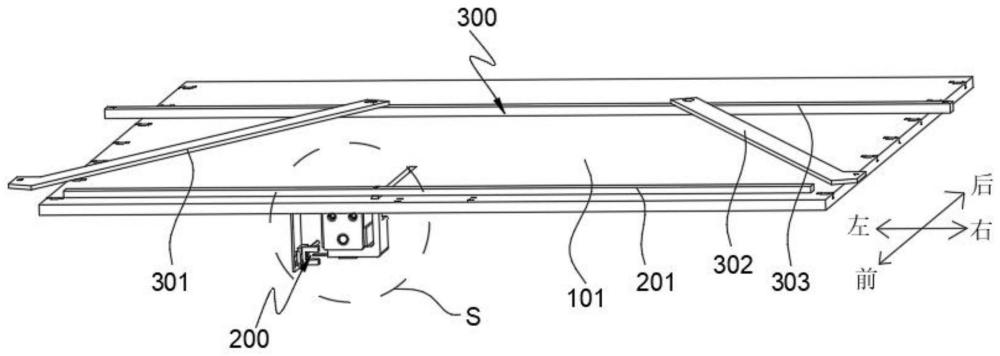
3、为解决上述技术问题,本发明提供如下技术方案:一种无人机停机坪,包括,停靠平台、推动部件驱动机构和限位机构,所述停靠平台上表面设有用于推动无人机移动的推动部件;所述推动部件驱动机构驱动所述推动部件在所述停靠平台上前后移动;所述推动部件驱动机构与所述停靠平台连接;所述限位机构位于所述停靠平台的上方,在所述停靠平台回收到无人机机库内的过程中,所述限位机构用于限制无人机相对所述停靠平台的移动位置,在所述停靠平台完全回收到无人机机库内后,无人机停在所述停靠平台的指定位置。
4、作为本发明所述无人机停机坪及无人机归中控制方法的一种优选方案,其中:所述推动部件设置为杆状结构。
5、作为本发明所述无人机停机坪及无人机归中控制方法的一种优选方案,其中:所述停靠平台左右方向上的长度为x,所述推动部件的长度为y,x-y≤0~30cm。
6、作为本发明所述无人机停机坪及无人机归中控制方法的一种优选方案,其中:所述限位机构设置有开口,所述开口朝向所述停靠平台的前端,所述开口的宽度由前端向后端逐渐变窄;所述限位机构与所述推动部件在纵向方向上错位。
7、作为本发明所述无人机停机坪及无人机归中控制方法的一种优选方案,其中:所述限位机构包括限位部件一、限位部件二和限位部件三,所述限位部件一的后端和所述限位部件二的后端分别与所述限位部件三连接,所述限位部件一的前端和所述限位部件二的前端分别位于所述停靠平台的左右两侧外。
8、.根据权利要求所述的无人机停机坪及无人机归中控制方法,其特征在于:所述限位部件一的后端与所述限位部件二的后端之间留有间距f,所述间距f与无人机脚架的间距e对应。
9、作为本发明所述无人机停机坪及无人机归中控制方法的一种优选方案,其中:所述限位部件三的左右两端位于所述停靠平台的左右两侧外,所述限位部件一的后端和所述限位部件二的后端分别与所述限位部件三的中部连接。
10、作为本发明所述无人机停机坪及无人机归中控制方法的一种优选方案,其中:所述停靠平台上开设有长条孔;所述推动部件驱动机构包括驱动装置和驱动件,所述驱动装置与所述停靠平台的下表面连接;所述驱动件的下端与所述驱动装置连接,所述驱动件的上端穿过所述长条孔后与所述推动部件连接,所述驱动装置通过所述驱动件带动所述推动部件前后移动。
11、作为本发明所述无人机停机坪及无人机归中控制方法的一种优选方案,其中:所述限位机构位于所述停靠平台的后半部,所述限位机构包括用于与无人机脚架抵接的两组支撑归中件,两组所述支撑归中件前端部之间设有间距n。
12、本发明还提供一种无人机归中控制方法,包括以下步骤:
13、步骤1:无人机机库根据无人机降落指令,将停靠平台移出;
14、步骤2:待无人机停靠在停靠平台后,推动部件从停靠平台的前端起始位置向后移动;推动部件将无人机推正后,再向前移动到预设位置后停止移动;与此同时,停靠平台移入无人机机库。
15、本发明的有益效果:本发明不仅可以将无人机归中,而且可以通过调节限位机构的角度或位置,从而调节无人机最终在停靠平台上的指定位置,便于配合充电位置,减少了因为无人机停靠位置产生偏差而发生的充电能源浪费;另外,本技术方案结构简单,使得本发明相对现有技术重量大幅度减轻,提升了停靠平台移入移出无人机机库的便捷性,有助于简化停靠平台与无人机机库之间的滑动连接结构,同时,有助于降低无人机机库的整体重量。
技术特征:
1.一种无人机停机坪,其特征在于:包括,
2.根据权利要求1所述的无人机停机坪,其特征在于:所述推动部件(201)设置为杆状结构。
3.根据权利要求2所述的无人机停机坪,其特征在于:所述停靠平台(101)左右方向上的长度为x,所述推动部件(201)的长度为y,x-y≤0~30cm。
4.根据权利要求1所述的无人机停机坪,其特征在于:所述限位机构(300)设置有开口,所述开口朝向所述停靠平台(101)的前端,所述开口的宽度由前端向后端逐渐变窄;所述限位机构(300)与所述推动部件(201)在纵向方向上错位。
5.根据权利要求4所述的无人机停机坪,其特征在于:所述限位机构(300)包括限位部件一(301)、限位部件二(302)和限位部件三(303),所述限位部件一(301)的后端和所述限位部件二(302)的后端分别与所述限位部件三(303)连接,所述限位部件一(301)的前端和所述限位部件二(302)的前端分别位于所述停靠平台(101)的左右两侧外。
6.根据权利要求5所述的无人机停机坪,其特征在于:所述限位部件一(301)的后端与所述限位部件二(302)的后端之间留有间距f,所述间距f与无人机脚架的间距e对应。
7.根据权利要求6所述的无人机停机坪,其特征在于:所述限位部件三(303)的左右两端位于所述停靠平台(101)的左右两侧外,所述限位部件一(301)的后端和所述限位部件二(302)的后端分别与所述限位部件三(303)的中部连接。
8.根据权利要求7所述的无人机停机坪,其特征在于:所述停靠平台(101)上开设有长条孔(102);所述推动部件驱动机构(200)包括驱动装置和驱动件(202),所述驱动装置与所述停靠平台(101)的下表面连接;所述驱动件(202)的下端与所述驱动装置连接,所述驱动件(202)的上端穿过所述长条孔(102)后与所述推动部件(201)连接,所述驱动装置通过所述驱动件(202)带动所述推动部件(201)前后移动。
9.根据权利要求8所述的无人机停机坪,其特征在于:所述限位机构(300)位于所述停靠平台(101)的后半部,所述限位机构(300)包括用于与无人机脚架抵接的两组支撑归中件(307),两组所述支撑归中件(307)前端部之间设有间距n。
10.一种基于权利要求1-9任一所述的无人机停机坪的无人机归中控制方法,其特征在于:包括,
技术总结
本发明属于无人机停靠设备技术领域,具体涉及一种无人机停机坪及无人机归中控制方法,包括停靠平台、推动部件驱动机构、限位机构,停靠平台上表面设有用于推动无人机移动的推动部件;推动部件驱动机构驱动推动部件在停靠平台上前后移动;推动部件驱动机构与停靠平台连接;在停靠平台回收到无人机机库内的过程中,限位机构用于限制无人机相对停靠平台的移动位置,在停靠平台完全回收到无人机机库内后,无人机停在停靠平台的指定位置;限位机构位于停靠平台的上方;本发明不仅可以将无人机归中,而且调节无人机到停靠平台的指定位置,便于无人机充电。
技术研发人员:陈绍南,吴剑豪,肖静,周柯,刘鹏,莫宇鸿,吴晓锐,冯河清,黄杰坤,彭宇翔,李林,高立克,王佳琳,龚文兰,吴宁,陈千懿,谢国汕,鹿可可,李宇程,李一铭,国家栋
受保护的技术使用者:广西电网有限责任公司电力科学研究院
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!