一种球形地空多模态旋翼无人机
本发明涉及无人机,特别是涉及一种球形地空多模态旋翼无人机。
背景技术:
1、旋翼无人机是一种通过旋转螺旋桨产生升力的无人机。这种设计使得它们能够垂直起降,无需长跑道,适用于狭小或不便的空间,且具有良好的机动性和操控性,能够在狭窄的空间中执行高度灵活的飞行动作。目前,旋翼无人机在多个领域得到广泛应用。
2、但是传统的旋翼无人机还存在一些问题,比如大多数旋翼无人机只有飞行这一个模态,受制于电池容量与高转速的电机,续航时间相对有限,通常在几分钟到几小时之间;同时大多数旋翼无人机造型单一,不便携带,并且体积较大,不易进入管道、废墟等场景执行任务。
3、已有的专利文献中公开有地空两栖无人机,例如,授权公告号为cn 116729659a的中国专利公开了一种地空两栖球形无人机,该方案中的无人机使用单轴旋翼,通过两个舵机控制气动力的方向进行飞行。在空中,其稳定性与机动性相较于常规布局四旋翼无人机较差;在地面,其通过舵机的转动改变质心位置实现球体的滚动,滚动速度较低。
4、因此,如何能够改善两栖无人机的飞行性能和行走性能,使其更好的适应复杂的应用环境,是本领域所面临的技术问题。
技术实现思路
1、本发明的目的是提供一种球形地空多模态旋翼无人机,以解决上述现有技术存在的问题,利用机体和机臂的铰接,能够在球形结构和多旋翼结构之间进行变换,可以在地面利用球形结构进行滚动,在空中利用多旋翼结构进行飞行,从而实现两栖无人机的功能的基础上,进一步提高了飞行性能和行走性能。
2、为实现上述目的,本发明提供了如下方案:
3、本发明提供一种球形地空多模态旋翼无人机,包括中空的球形本体以及设置在所述球形本体内的滚动驱动结构;
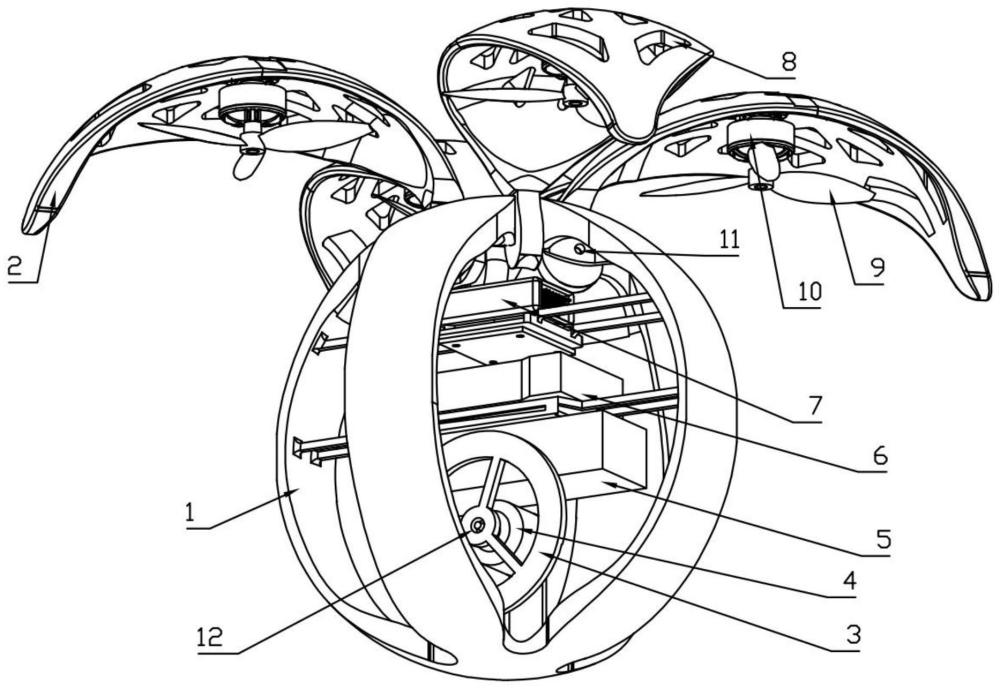
4、所述球形本体包括机体和机臂,所述机体上开设有窗口,所述机臂铰接在所述窗口处,所述机臂与所述窗口的铰接位置远离所述球形本体的重心,所述机臂内侧设置有螺旋桨;
5、所述机臂覆盖所述窗口后使得所述机体与所述机臂形成球形结构,所述滚动驱动结构用于驱动所述球形结构进行滚动;
6、所述机臂展开后形成多旋翼结构,所述螺旋桨提供所述机臂展开的动力,所述螺旋桨提供所述多旋翼结构飞行的动力。
7、优选地,所述机臂为弧面结构,所述弧面结构为球面的一部分,所述弧面结构的中部设置有用于安装螺旋桨的第一安装孔,所述第一安装孔的周围设置有镂空孔。
8、优选地,所述弧面结构的长度介于四分之一圆弧和二分之一圆弧之间。
9、优选地,所述机臂与所述机体之间设置有磁吸结构,所述螺旋桨产生的推力能够克服所述磁吸结构产生的磁力使得所述机臂展开。
10、优选地,所述机体内部远离所述铰接位置的一端设置有第二安装孔,所述滚动驱动结构包括惯性轮,所述惯性轮安装在所述第二安装孔,所述机体在地面静止状态时所述惯性轮的转动平面位于竖向。
11、优选地,所述机体内部设置有电池,所述电池位于所述惯性轮的一侧,所述电池靠近所述机体的底端。
12、优选地,所述机体内部设置有飞行控制器,所述飞行控制器位于所述电池的上方。
13、优选地,所述螺旋桨连接有第一电机,所述惯性轮连接有第二电机,所述第一电机与所述飞行控制器电性连接。
14、优选地,所述机体内部设置有信号接收器,所述信号接收器位于所述飞行控制器的上方。
15、优选地,所述电池、所述飞行控制器和所述信号接收器采用长度方向同向的设置方式,在所述机体的中部形成整体竖向设置的设备区,所述惯性轮的转动平面平行于所述设备区所在竖向平面,所述设备区的两侧形成容纳所述螺旋桨的运动空间。
16、本发明相对于现有技术取得了以下技术效果:
17、本发明利用机体和机臂的铰接,未展开机臂时整体为球形结构,展开机臂后形成多旋翼结构,通过对螺旋桨的控制能够在球形结构和多旋翼结构之间进行变换,通过对滚动驱动结构的控制能够提供地面滚动的动力;可以在地面利用球形结构进行滚动,提高地面行走的性能,在空中利用多旋翼结构进行飞行,提高在空中飞行的能力和稳定性;从而在实现两栖无人机的功能的基础上,进一步提高了飞行性能和行走性能。
18、本发明所包含的其他技术方案还能实现如下技术效果:
19、本发明通过一套动力系统控制滚动与飞行两种运动模态。当机臂与机体处于闭合状态时,此时呈球形结构,第二电机驱动惯性轮转动,惯性轮对机体的反作用力偶驱动整个机体实现在地面的滚动运动,相较于舵机驱动,惯性轮驱动效率高,且可以获得较大的滚动速度,相较于螺旋桨驱动,惯性轮驱动结构简单,不需要复杂的机械结构实现旋翼系统的转向,且惯性轮驱动的动力学模型更为简单,对控制系统的设计带来较大便利;当四个机臂在旋翼气动力作用下张开时,呈常规四旋翼无人机布局,实现飞行运动。
20、本发明无人机工作时,若地面条件允许,可以先通过滚动到达作业地点附近,再开始飞行,移动相同距离的情况下,尤其是针对一类具有向下坡度的地面运动时,其滚动耗电量远小于飞行,通过滚动与飞行两种运动的结合,可以大大延长无人机续航时间;此外,由于球形机体的设计与可以主动滚动的功能,可以在管道、废墟等传统无人机不便进入的环境下执行任务。
技术特征:
1.一种球形地空多模态旋翼无人机,其特征在于:包括中空的球形本体以及设置在所述球形本体内的滚动驱动结构;
2.根据权利要求1所述的球形地空多模态旋翼无人机,其特征在于:所述机臂为弧面结构,所述弧面结构为球面的一部分,所述弧面结构的中部设置有用于安装螺旋桨的第一安装孔,所述第一安装孔的周围设置有镂空孔。
3.根据权利要求2所述的球形地空多模态旋翼无人机,其特征在于:所述弧面结构的长度介于四分之一圆弧和二分之一圆弧之间。
4.根据权利要求1所述的球形地空多模态旋翼无人机,其特征在于:所述机臂与所述机体之间设置有磁吸结构,所述螺旋桨产生的推力能够克服所述磁吸结构产生的磁力使得所述机臂展开。
5.根据权利要求1-4任一项所述的球形地空多模态旋翼无人机,其特征在于:所述机体内部远离所述铰接位置的一端设置有第二安装孔,所述滚动驱动结构包括惯性轮,所述惯性轮安装在所述第二安装孔,所述机体在地面静止状态时所述惯性轮的转动平面位于竖向。
6.根据权利要求5所述的球形地空多模态旋翼无人机,其特征在于:所述机体内部设置有电池,所述电池位于所述惯性轮的一侧,所述电池靠近所述机体的底端。
7.根据权利要求6所述的球形地空多模态旋翼无人机,其特征在于:所述机体内部设置有飞行控制器,所述飞行控制器位于所述电池的上方。
8.根据权利要求7所述的球形地空多模态旋翼无人机,其特征在于:所述螺旋桨连接有第一电机,所述惯性轮连接有第二电机,所述第一电机与所述飞行控制器电性连接。
9.根据权利要求7所述的球形地空多模态旋翼无人机,其特征在于:所述机体内部设置有信号接收器,所述信号接收器位于所述飞行控制器的上方。
10.根据权利要求9所述的球形地空多模态旋翼无人机,其特征在于:所述电池、所述飞行控制器和所述信号接收器采用长度方向同向的设置方式,在所述机体的中部形成整体竖向设置的设备区,所述惯性轮的转动平面平行于所述设备区所在竖向平面,所述设备区的两侧形成容纳所述螺旋桨的运动空间。
技术总结
本发明公开一种球形地空多模态旋翼无人机,属于无人机技术领域,包括中空的球形本体以及设置在球形本体内的滚动驱动结构;球形本体包括机体和机臂,机体上开设有窗口,机臂铰接在窗口处,机臂与窗口的铰接位置远离球形本体的重心,机臂内侧设置有螺旋桨;机臂覆盖窗口后使得机体与机臂形成球形结构,滚动驱动结构用于驱动球形结构进行滚动;机臂展开后形成多旋翼结构,螺旋桨提供机臂展开的动力,螺旋桨提供多旋翼结构飞行的动力。本发明利用机体和机臂的铰接,能够在球形结构和多旋翼结构之间进行变换,可以在地面利用球形结构进行滚动,在空中利用多旋翼结构进行飞行,从而实现两栖无人机的功能的基础上,进一步提高了飞行性能和行走性能。
技术研发人员:张家应,李潇,孙宇阳,黄可,王子昂,宋馨怡,覃思杨
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!