一种无人机机巢换电池用机械臂的制作方法
本技术涉及机械臂,具体而言,涉及一种无人机机巢换电池用机械臂。
背景技术:
1、无人机自动化管理在电力系统领域属于业界技术前沿,涵盖无人机、人工智能、机器人、自动化、信息通信等技术,是一种多学科交叉融合的高新技术,近年来,无人机自动化管理已成为输电线路的重要自动化管理手段,自动化管理效益和质量较传统人工自动化管理有显著提高,现有的无人机供电方式多采用电池供电,无人机在使用一段时间后需要更换电池。
2、现有专利(公告号:cn213861926u),一种无人机用可实现快速更换电池的机械臂,涉及到机械臂技术领域,包括机架,所述机架的顶部内壁上转动连接有上转盘,所述机架的底部内设有传动室,所述传动室的顶部内壁上开设有第一转孔,所述第一转孔内转动连接有下转盘,所述传动室底部内壁上固定连接有旋转电机,所述旋转电机的输出轴驱动连接有第一传动轴,所述第一传动轴的顶端固定连接在所述下转盘的底部。本实用新型中,该无人机用换电机械臂可实现对机械臂总成位置的三维调节,便于使机械臂总成到达指定位置并完成相应动作,相比人工操作,不仅节省了人力,降低了工作强度,还提高了换电工作的安全性与准确性。
3、但是,上述技术存在以下不足:
4、该装置通过机械臂总成对电池进行夹持输送,但在对电池进行夹持的过程中,不便于根据电池外壳的材料调节夹持的力度,若夹持力度过大的话,容易对电池外壳造成损伤,影响电池的正常使用,若夹持力度不足的话,电池的稳定性便会较差,影响装置的使用效果。
5、因此我们对此做出改进,提出一种无人机机巢换电池用机械臂。
技术实现思路
1、本实用新型的目的在于:针对目前存在的该装置通过机械臂总成对电池进行夹持输送,但在对电池进行夹持的过程中,不便于根据电池外壳的材料调节夹持的力度,若夹持力度过大的话,容易对电池外壳造成损伤,影响电池的正常使用,若夹持力度不足的话,电池的稳定性便会较差,影响装置的使用效果。
2、为了实现上述实用新型目的,本实用新型提供了以下技术方案:
3、无人机机巢换电池用机械臂,以改善上述问题。
4、本实用新型具体是这样的:
5、包括机架,还包括:所述机架上方安装有驱动调节装置,所述驱动调节装置输出端安装有滑架,所述滑架顶端安装有承载板,所述承载板顶端安装有安装架,所述安装架侧壁安装有输出端转动贯穿安装架的驱动电机,所述驱动电机外壁对称套接有夹爪,所述夹爪侧壁安装有保护架,所述保护架侧壁安装有缓冲保护部件,所述夹爪远离保护架的一侧安装有保护盒,所述保护盒内壁安装有受力调节部件。
6、作为本实用新型优选的技术方案,所述缓冲保护部件包括通过连杆滑动贯穿于夹爪侧壁的保护架、套接于连杆外壁且连接于保护架与夹爪之间的弹性件、固定连接于保护架远离夹爪一侧的橡胶防滑垫。
7、作为本实用新型优选的技术方案,所述受力调节部件包括开设在夹爪靠近保护架一侧的安装槽、滑动连接在于安装槽内壁的安装板、固定连接于安装板靠近保护架一侧的挤压按钮、固定连接于保护架靠近夹爪一侧且与挤压按钮相配合的挤压杆,所述挤压按钮与驱动电机信号连接。
8、作为本实用新型优选的技术方案,所述受力调节部件还包括螺旋贯穿夹爪侧壁且与安装板固定连接的螺纹杆、套接于螺纹杆外壁且转动连接于夹爪侧壁的内螺纹套、固定连接于内螺纹套外壁的外齿轮、转动连接于夹爪侧壁且与外齿轮相啮合的大调节齿轮、转动连接于夹爪侧壁且与大调节齿轮相对称的小调节齿轮,所述小调节齿轮与外齿轮相啮合。
9、作为本实用新型优选的技术方案,所述大调节齿轮和小调节齿轮侧壁均固定连接有转动贯穿保护盒侧壁的把手杆,所述把手杆内壁安装有支撑板,所述支撑板侧壁连接有固定螺栓,所述夹爪顶端开设有与安装槽相连通的限位槽,所述限位槽内壁滑动连接有与安装板固定连接的指针,所述夹爪顶端安装有与指针相配合的刻度尺,所述承载板底端固定安装有电动伸缩杆,所述承载板顶端安装有与电动伸缩杆输出端固定连接的支撑架。
10、与现有技术相比,本实用新型的有益效果:
11、在本实用新型的方案中:
12、通过设置的挤压按钮配合挤压杆,能够根据电池外壳的材质,调节夹爪的夹持报警力度,在通过夹爪配合保护架对电池进行夹持时,有效的缓冲夹爪的冲击力,且当夹爪对电池外壳夹持稳定时,通过挤压杆按压挤压按钮,从而自动控制驱动电机停止运行,使电池外壳被夹持的力度,处于一个合适的区间,从而避免出现电池外壳夹持受损或夹持力度不足的情况,提高装置的使用效果。
技术特征:
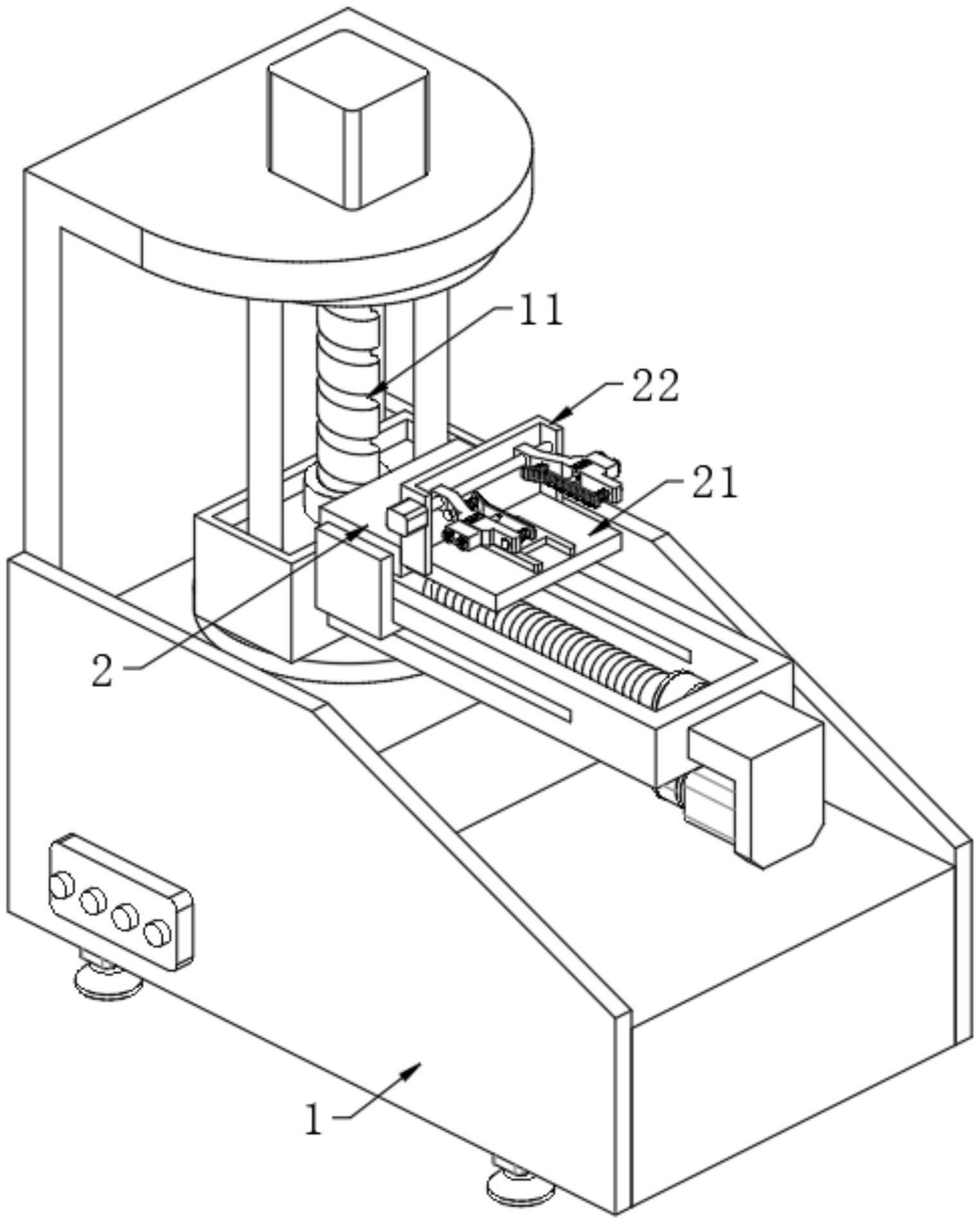
1.一种无人机机巢换电池用机械臂,包括机架(1),其特征在于,还包括:所述机架(1)上方安装有驱动调节装置(11),所述驱动调节装置(11)输出端安装有滑架(2),所述滑架(2)顶端安装有承载板(21),所述承载板(21)顶端安装有安装架(22),所述安装架(22)侧壁安装有输出端转动贯穿安装架(22)的驱动电机(25),所述驱动电机(25)外壁对称套接有夹爪(3),所述夹爪(3)侧壁安装有保护架(36),所述保护架(36)侧壁安装有缓冲保护部件,所述夹爪(3)远离保护架(36)的一侧安装有保护盒(31),所述保护盒(31)内壁安装有受力调节部件。
2.根据权利要求1所述的一种无人机机巢换电池用机械臂,其特征在于,所述缓冲保护部件包括通过连杆滑动贯穿于夹爪(3)侧壁的保护架(36)、套接于连杆外壁且连接于保护架(36)与夹爪(3)之间的弹性件(37)、固定连接于保护架(36)远离夹爪(3)一侧的橡胶防滑垫(35)。
3.根据权利要求2所述的一种无人机机巢换电池用机械臂,其特征在于,所述受力调节部件包括开设在夹爪(3)靠近保护架(36)一侧的安装槽(33)、滑动连接在于安装槽(33)内壁的安装板(45)、固定连接于安装板(45)靠近保护架(36)一侧的挤压按钮(49)、固定连接于保护架(36)靠近夹爪(3)一侧且与挤压按钮(49)相配合的挤压杆(38),所述挤压按钮(49)与驱动电机(25)信号连接。
4.根据权利要求3所述的一种无人机机巢换电池用机械臂,其特征在于,所述受力调节部件还包括螺旋贯穿夹爪(3)侧壁且与安装板(45)固定连接的螺纹杆(43)、套接于螺纹杆(43)外壁且转动连接于夹爪(3)侧壁的内螺纹套、固定连接于内螺纹套外壁的外齿轮(44)、转动连接于夹爪(3)侧壁且与外齿轮(44)相啮合的大调节齿轮(41)、转动连接于夹爪(3)侧壁且与大调节齿轮(41)相对称的小调节齿轮(42),所述小调节齿轮(42)与外齿轮(44)相啮合。
5.根据权利要求4所述的一种无人机机巢换电池用机械臂,其特征在于,所述大调节齿轮(41)和小调节齿轮(42)侧壁均固定连接有转动贯穿保护盒(31)侧壁的把手杆(4),所述把手杆(4)内壁安装有支撑板(47),所述支撑板(47)侧壁连接有固定螺栓(48),所述夹爪(3)顶端开设有与安装槽(33)相连通的限位槽(32),所述限位槽(32)内壁滑动连接有与安装板(45)固定连接的指针(46),所述夹爪(3)顶端安装有与指针(46)相配合的刻度尺(34),所述承载板(21)底端固定安装有电动伸缩杆(23),所述承载板(21)顶端安装有与电动伸缩杆(23)输出端固定连接的支撑架(24)。
技术总结
本技术公开了一种无人机机巢换电池用机械臂,属于机械臂技术领域,本技术提供了一种无人机机巢换电池用机械臂,包括机架,还包括:机架上方安装有驱动调节装置,驱动调节装置输出端安装有滑架,滑架顶端安装有承载板,承载板顶端安装有安装架,安装架侧壁安装有输出端转动贯穿安装架的驱动电机,驱动电机外壁对称套接有夹爪,夹爪侧壁安装有保护架,保护架侧壁安装有缓冲保护部件,夹爪远离保护架的一侧安装有保护盒,保护盒内壁安装有受力调节部件,本技术可以根据电池外壳的材质构成,调节夹爪的夹持力度报警区间,在夹爪的夹持力度达到设定区间时自动停止夹持,提高电池的夹持效果。
技术研发人员:罗海林
受保护的技术使用者:四川路飞扬科技有限责任公司
技术研发日:20230202
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!