一种潜伏式海空跨域无人机的制作方法
本技术涉及无人机,具体涉及一种潜伏式海空跨域无人机。
背景技术:
1、海空两用无人机在军事、农业、电力巡检、警用执法、地质勘探、环境监测、森林防火以及影视航拍等领域均具有重要作用,现有一种潜伏式海空跨域无人机,具备潜伏舱,可通过锚链漂浮在海面上并通过锚链防止被洋流掀翻,在得到指令后壳体打开并将无人机展开放出,在平时则在潜伏舱的内部漂流在海面上,从而进行长时间的潜伏。针对现有技术存在以下问题:
2、现有的潜伏式海空跨域无人机的潜伏舱大多需要从壳体的顶部向两侧开裂将潜伏舱完全打开后才能进行无人机的起飞和降落,由于海面上经常随风浪吹起海藻或海洋垃圾等,在潜伏舱完全打开时垃圾容易被卷到潜伏舱内,从而将潜伏舱的内部弄脏,当垃圾堆积过多时容易将无人机堵住,从而影响到无人机的正常起飞,且由于现有的潜伏式海空跨域无人机的潜伏舱大多为圆筒形,因此无人机在收回时不容易在降落后保持垂直,从而在下次起飞时容易偏斜甚至机翼被卷进海水中,从而容易使无人机损坏。
技术实现思路
1、本实用新型的主要目的在于提供一种潜伏式海空跨域无人机,可以有效解决上述背景中提出的问题。
2、为实现上述目的,本实用新型所采用的技术方案是:
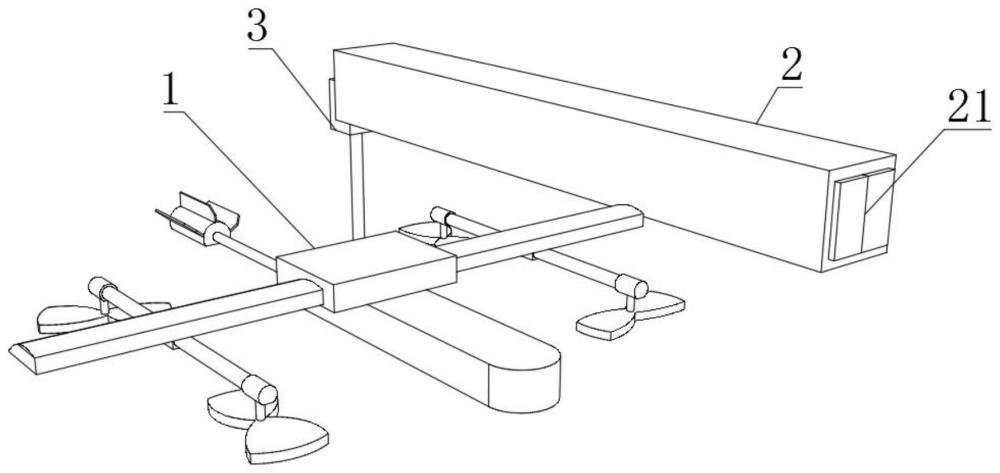
3、一种潜伏式海空跨域无人机,包括复合翼无人机和潜伏舱,所述复合翼无人机可自动展开和折叠,所述潜伏舱的外表面固定安装有太阳能电池板,可为内部元件和复合翼无人机供电,所述潜伏舱的尾部固定安装有锚链,所述潜伏舱的正面活动连接有舱门,所述潜伏舱的内部的底部固定安装有滑轨,所述滑轨的顶部活动连接有停机板,所述停机板的尺寸略大于复合翼无人机折叠后的尺寸,所述停机板的顶部设置有可供复合翼无人机停放固定的槽。
4、本实用新型技术方案的进一步改进在于:所述潜伏舱的内壁固定安装有电机二,所述电机二的输出轴固定连接有锥齿轮一,所述锥齿轮一的侧面啮合连接有锥齿轮二,所述锥齿轮二的轴心处固定连接有双向螺纹转轴,所述双向螺纹转轴的两端活动连接在潜伏舱的内壁。
5、采用上述技术方案,该方案中的电机二带动锥齿轮一转动,从而通过锥齿轮二带动双向螺纹转轴转动。
6、本实用新型技术方案的进一步改进在于:所述舱门的内侧固定连接有连接杆一,所述连接杆一的侧面固定连接有滑块一,所述滑块一的中间活动连接有滑杆,所述滑杆的两端固定连接在潜伏舱的内壁。
7、采用上述技术方案,该方案中的滑块一沿着滑杆滑动,从而防止舱门在移动时偏移。
8、本实用新型技术方案的进一步改进在于:所述滑块一的顶部固定连接有连接杆二,所述双向螺纹转轴的中间啮合连接有螺母二,所述螺母二的底部固定连接在连接杆二的顶部,所述双向螺纹转轴的两侧的结构相同。
9、采用上述技术方案,该方案中的双向螺纹转轴带动两侧的螺母二同时向两侧移动,从而带动连接杆二移动。
10、本实用新型技术方案的进一步改进在于:所述连接杆一的中间固定连接有转杆,所述转杆的侧面活动连接有连杆组,所述连杆组的最边缘的转杆固定连接在潜伏舱的侧壁。
11、采用上述技术方案,该方案中的连杆一通过转杆带动连杆组移动,从而通过连杆组带动舱门移动。
12、本实用新型技术方案的进一步改进在于:所述潜伏舱的内壁底部固定安装有电机一,所述电机一的输出轴固定连接有螺纹转轴,所述螺纹转轴的另一侧活动连接在潜伏舱的内壁,所述螺纹转轴的中间啮合连接有螺母一,所述螺母一的顶部固定连接有滑块二,所述滑块二固定连接在停机板的底部。
13、采用上述技术方案,该方案中的电机一带动螺纹转轴转动,从而通过螺母一和滑块二带动停机板移动。
14、由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
15、1、本实用新型提供一种潜伏式海空跨域无人机,通过舱门和电机二的共同配合,通过电机二带动锥齿轮一转动,通过锥齿轮二带动双向螺纹转轴转动,双向螺纹转轴带动两侧的螺母二同时向两侧移动,通过连接杆二带动滑块一沿着滑杆滑动,滑块一带动连接杆一移动,通过转杆带动连杆组移动,从而通过连杆组带动舱门移动,从而将舱门向两侧打开,使得潜伏舱无需完全打开即可使进行复合翼无人机的起飞和降落,从而防止海洋垃圾等被风浪卷进潜伏舱内,从而避免潜伏舱的内部堆积垃圾。
16、2、本实用新型提供一种潜伏式海空跨域无人机,通过停机板和电机一的共同配合,通过电机一带动螺纹转轴转动,从而通过螺母一和滑块二带动停机板横向移动,通过停机板起飞和降落复合翼无人机,从而使复合翼无人机的起飞和降落保持垂直。
技术特征:
1.一种潜伏式海空跨域无人机,包括复合翼无人机(1)和潜伏舱(2),其特征在于:所述复合翼无人机(1)可自动展开和折叠,所述潜伏舱(2)的外表面固定安装有太阳能电池板,可为内部元件和复合翼无人机(1)供电,所述潜伏舱(2)的尾部固定安装有锚链(3),所述潜伏舱(2)的正面活动连接有舱门(21),所述潜伏舱(2)的内部的底部固定安装有滑轨,所述滑轨的顶部活动连接有停机板(22),所述停机板(22)的尺寸略大于复合翼无人机(1)折叠后的尺寸,所述停机板(22)的顶部设置有可供复合翼无人机(1)停放固定的槽。
2.根据权利要求1所述的一种潜伏式海空跨域无人机,其特征在于:所述潜伏舱(2)的内壁固定安装有电机二(24),所述电机二(24)的输出轴固定连接有锥齿轮一(241),所述锥齿轮一(241)的侧面啮合连接有锥齿轮二(242),所述锥齿轮二(242)的轴心处固定连接有双向螺纹转轴(243),所述双向螺纹转轴(243)的两端活动连接在潜伏舱(2)的内壁。
3.根据权利要求2所述的一种潜伏式海空跨域无人机,其特征在于:所述舱门(21)的内侧固定连接有连接杆一(211),所述连接杆一(211)的侧面固定连接有滑块一(213),所述滑块一(213)的中间活动连接有滑杆(214),所述滑杆(214)的两端固定连接在潜伏舱(2)的内壁。
4.根据权利要求3所述的一种潜伏式海空跨域无人机,其特征在于:所述滑块一(213)的顶部固定连接有连接杆二(212),所述双向螺纹转轴(243)的中间啮合连接有螺母二(244),所述螺母二(244)的底部固定连接在连接杆二(212)的顶部,所述双向螺纹转轴(243)的两侧的结构相同。
5.根据权利要求3所述的一种潜伏式海空跨域无人机,其特征在于:所述连接杆一(211)的中间固定连接有转杆(2111),所述转杆(2111)的侧面活动连接有连杆组(2112),所述连杆组(2112)的最边缘的转杆固定连接在潜伏舱(2)的侧壁。
6.根据权利要求1所述的一种潜伏式海空跨域无人机,其特征在于:所述潜伏舱(2)的内壁底部固定安装有电机一(23),所述电机一(23)的输出轴固定连接有螺纹转轴(231),所述螺纹转轴(231)的另一侧活动连接在潜伏舱(2)的内壁,所述螺纹转轴(231)的中间啮合连接有螺母一(232),所述螺母一(232)的顶部固定连接有滑块二(233),所述滑块二(233)固定连接在停机板(22)的底部。
技术总结
本技术公开了一种潜伏式海空跨域无人机,涉及无人机技术领域,包括复合翼无人机和潜伏舱,所述复合翼无人机可自动展开和折叠,所述潜伏舱的外表面固定安装有太阳能电池板,可为内部元件和复合翼无人机供电,所述潜伏舱的尾部固定安装有锚链,所述潜伏舱的正面活动连接有舱门,所述潜伏舱的内部的底部固定安装有滑轨,所述滑轨的顶部活动连接有停机板,所述停机板的尺寸略大于复合翼无人机折叠后的尺寸,所述停机板的顶部设置有可供复合翼无人机停放固定的槽。本技术通过舱门和电机二的共同配合,使得潜伏舱无需完全打开即可使进行复合翼无人机的起飞和降落,从而防止海洋垃圾等被风浪卷进潜伏舱内,避免潜伏舱的内部堆积垃圾。
技术研发人员:仇梓峰,王雅涵,王永杰,白慧慧,张小龙,胡炎
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:20230707
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!