用于堆高机的控制系统以及控制方法与流程
1.本发明是有关于一种用于堆高机的控制系统以及控制方法,尤其是一种具有过载保护机制的控制系统以及控制方法。
背景技术:
2.为提高堆高机的使用安全性,在获知货物的重量的前提下,堆高机的使用者能够依据货物的重量以决定是否操作堆高机以对货物进行装卸或搬运作业。然而,在无法获知货物的重量(如,堆高机为无人堆高机)的前提下,若贸然地进行装卸或搬运作业,如果遇到超载可能会发生无法预知的危险,如车体车头端翘起及翻覆等状况。因此,如何建立堆高机(如,无人堆高机)的过载保护机制以提高堆高机的使用安全性,是本领域技术人员努力研究的课题之一。
[0003]“背景技术”段落只是用来帮助了解本
技术实现要素:
,因此在“背景技术”段落所揭露的内容可能包含一些没有构成所属技术领域中的技术人员所知道的已知技术。在“背景技术”段落所揭露的内容,不代表该内容或者本发明一个或多个实施例所要解决的问题,在本发明申请前已被所属技术领域中的技术人员所知晓或认知。
发明内容
[0004]
本发明提供一种能够提高堆高机的使用安全性的控制系统以及控制方法。
[0005]
本发明的其他目的和优点可以从本发明所揭露的技术特征中得到进一步的了解。
[0006]
为达上述之一或部分或全部目的或是其他目的,本发明的一实施例提出一种用于堆高机的控制系统,控制系统包括举升机构、驱动装置、感测装置以及控制装置。驱动装置耦接于举升机构。驱动装置用于驱动举升机构。感测装置耦接于举升机构。感测装置用于感测举升机构的位移量。控制装置耦接于感测装置。控制装置依据位移量获得举升机构的位移速度,并依据位移速度判断举升机构是否过载。当控制装置判断发生过载时,控制装置控制驱动装置停止驱动举升机构。
[0007]
为达上述之一或部分或全部目的或是其他目的,本发明的一实施例提出一种用于堆高机的控制方法。控制方法包括:透过驱动装置驱动举升机构;透过感测装置感测举升机构的位移量;透过控制装置依据位移量获得举升机构的位移速度,并透过控制装置依据位移速度判断举升机构是否过载;以及当控制装置判断过载发生时,控制驱动装置停止驱动举升机构。
[0008]
基于上述,本发明的实施例至少具有以下其中一个优点或功效。本发明的控制系统以及控制方法能够依据举升机构的位移量获得举升机构的位移速度,并依据位移速度判断举升机构是否过载。当控制装置判断过载发生时,本发明的控制系统以及控制方法停止驱动举升机构。如此一来,堆高机的使用安全性能够被提高。
[0009]
为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图作详细说明如下。
附图说明
[0010]
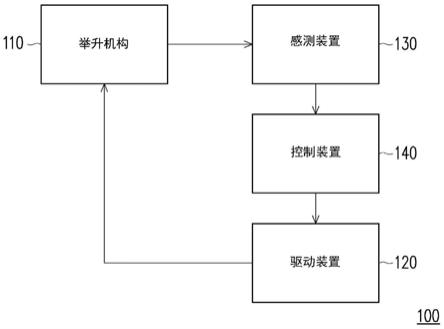
图1是依据本发明一实施例所绘示的控制系统的示意图。
[0011]
图2是依据本发明第一实施例所绘示的控制方法流程图。
[0012]
图3是依据本发明第二实施例所绘示的控制方法流程图。
[0013]
图4是依据本发明第三实施例所绘示的控制方法流程图。
[0014]
图5是依据本发明一实施例所绘示的过载的第一级别判定示意图。
[0015]
图6是依据本发明一实施例所绘示的过载的第二级别判定示意图。
[0016]
图7是依据本发明一实施例所绘示的过载的第三级别判定示意图。
具体实施方式
[0017]
有关本发明之前述及其他技术内容、特点与功效,在以下配合参考附图之一较佳实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本发明。
[0018]
请参考图1,图1是依据本发明一实施例所绘示的控制系统的示意图。在本实施例中,控制系统100可适用于任意形式的堆高机或无人堆高机。控制系统100包括举升机构110、驱动装置120、感测装置130以及控制装置140。举升机构110可例如是货叉、吊具或平台。驱动装置120耦接于举升机构110。驱动装置120驱动举升机构110。驱动装置120可例如是借由油压方式、汽压方式或机械传动方式驱动举升机构110向上移动或向下移动的装置。感测装置130耦接于举升机构110。感测装置130感测举升机构110的位移量。举例来说,感测装置130可例如是拉线式位移感测器或光学式距离感测器。
[0019]
在本实施例中,控制装置140耦接于感测装置130。控制装置140会接收感测装置130的举升机构110的位移量的信号。控制装置140依据位移量获得/计算出举升机构110的位移速度,并依据位移速度判断举升机构110是否过载。举例来说,举升机构110在举升的过程中,控制装置140能够依据举升机构110的位移量的变化即时地运算出举升机构110的位移速度。在本实施例中,当控制装置140判断出发生过载时,控制装置140会控制驱动装置120停止驱动举升机构110。在另一方面,当控制装置140判断没有发生过载时,控制装置140会控制驱动装置120继续驱动举升机构110。控制装置140可例如是中央处理单元(central processing unit,cpu),或是其他可编程之一般用途或特殊用途的微处理器(microprocessor)、数字信号处理器(digital signal processor,dsp)、可编程控制器、特殊应用集成电路(application specific integrated circuits,asic)、可编程逻辑装置(programmable logic device,pld)或其他类似装置或这些装置的组合,其可载入并执行电脑程序。
[0020]
接下来说明本发明的控制方法。请同时参考图1以及图2,图2是依据本发明第一实施例所绘示的控制方法流程图。在本实施例中,控制方法可适用于控制系统100。在步骤s110中,控制系统100透过驱动装置120驱动举升机构110。在步骤s120中,感测装置130感测被驱动的举升机构110的位移量。在步骤s130中,控制装置140会接收举升机构110的位移量的信号,并依据位移量获得/计算出举升机构110的位移速度。控制装置140还依据位移速度判断举升机构110是否过载。在步骤s140中,当控制装置140判断出过载发生时,控制装置140会控制驱动装置120停止驱动举升机构110。步骤s110~s140的实施细节可以在图1的实
施例中获致足够的教示,因此恕不在此重述。
[0021]
在此值得一提的是,控制系统100以及控制方法能够依据举升机构110的位移量获得举升机构110的位移速度,并依据位移速度判断举升机构110是否过载。当控制装置140判断过载发生时,举升机构110被停止驱动。也应注意的是,控制系统100以及控制方法是考量到堆高机的实际举升状况来判断是否过载。如此一来,堆高机的使用安全性能够被大幅提高。
[0022]
举例来说明控制方法的实施细节。请同时参考图1以及图3,图3是依据本发明第二实施例所绘示的控制方法流程图。第二实施例中的控制方法可适用于控制系统100。在本实施例中,步骤s210~s230相似于图2的步骤s110~s130。在步骤s240中,控制装置140会依据位移速度判断堆高机是否发生过载。举例来说,当位移速度小于预设速度(例如是0.1米/秒)时,控制装置140会判断堆高机发生过载。另举例来说,当位移速度大于预设速度时,控制装置140会判断堆高机没有发生过载。
[0023]
在本实施例中,当控制装置140在步骤s240中判断发生过载时,控制装置140会在步骤s250中判定出过载的级别,并在步骤s260中控制驱动装置120以停止驱动举升机构110。在本实施例中,控制装置在步骤s250中会反应于位移速度的变化判定出过载的级别。所述的级别例如包括第一级别(如危害级荷重异常)、第二级别(如中级荷重异常)以及第三级别(如轻级荷重异常)。第一级别的危险程度大于第二级别的危险程度,而第二级别的危险程度大于第三级别的危险程度。在发生过载的情况下,控制装置140例如会提供对应于过载的级别的控制信号,借以使控制系统100或堆高机能依据控制信号产生对应于过载的级别的警示信息,例如是发出警告声响或闪灯等。
[0024]
在另一方面,当控制装置140在步骤s240中判断没有发生过载时,表示举升机构110是以大于预设速度的位移速度移动中。控制装置140会在步骤s270中判断举升机构110是否到达目标高度。目标高度例如是举升机构110将货物运送到指定位置所要到达的设定高度。如果举升机构110还没有到达目标高度,控制方法会回到s220以感测举升机构110的位移量。如果举升机构110到达目标高度,控制装置140会在步骤s260中控制驱动装置120以停止驱动举升机构110。
[0025]
进一步举例来说明,请同时参考图1以及图4,图4是依据本发明第三实施例所绘示的控制方法流程图。在本实施例中,步骤s310~s330相似于图2的步骤s110~s 130。在步骤s340中,控制装置140会判断举升机构110的位移速度是否小于预设速度。预设速度例如是0.1米/秒(本发明并不局限于此)。当控制装置140在步骤s340中判断出位移速度小于预设速度时,控制装置140会对位移速度低于预设速度的维持时间进行计时。在步骤s350中,控制装置140会判断位移速度低于预设速度的维持时间是否到达预设时间。当控制装置140在步骤s350中判断出位移速度低于预设速度的维持时间到达预设时间(如,0.1秒)时,控制装置140会在步骤s360中判定出过载的级别,并在步骤s370中控制驱动装置120以停止驱动举升机构110。
[0026]
当控制装置140在步骤s350中判断出位移速度低于预设速度的维持时间被中断而无法到达预设时间时,控制装置140会在步骤s380中判断举升机构110是否到达目标高度。如果举升机构110还没有到达目标高度,控制方法会回到s320以感测举升机构110的位移量。如果举升机构110到达目标高度,控制装置140会在步骤s370中控制驱动装置120以停止
驱动举升机构110。
[0027]
请回到步骤s340,当控制装置140在步骤s340中判断位移速度大于或等于预设速度时,会在步骤s380中判断举升机构110是否上升到目标高度。也就是说,在符合(1)位移速度大于或等于预设速度以及(2)位移速度低于预设速度的维持时间短于预设时间等条件的其中一者的情况下,控制装置140会判断没有堆高机发生过载。如果举升机构110还没有到达目标高度,控制方法会回到s320以感测举升机构110的位移量。如果举升机构110到达目标高度,控制装置140会在步骤s370中控制驱动装置120以停止驱动举升机构110。
[0028]
接下来举例来说明关于图3中的步骤s250的级别判定。请同时参考图1以及图5,图5是依据本发明一实施例所绘示的过载的第一级别判定示意图。在初期,举升机构110上升时的位移速度sp1会大于预设速度dsp,因此堆高机的运作是正常的。然而,举升机构110到达高度h1时不再上升,进而无法到达目标高度h2。上述的情况例如是举升机构110在高度h1开始乘载到过重的货物,或者是举升机构110的移动方向被其他物件(如,货架)阻挡,使得驱动装置120无法负荷而使举升机构110无法再上升。也就是说,位移速度sp1等于0。控制装置140会对位移速度sp1(即,等于0)低于预设速度dsp(例如是0.1米/秒)的维持时间进行计时。当位移速度sp1等于0并且维持时间到达预设时间t1(如,0.1秒)时,控制装置140会判定出过载的级别为第一级别。在一些情况下,当位移速度sp1接近0并且维持时间到达预设时间t1时,控制装置140也会判定出过载的级别为第一级别。在一些实施例中,预设速度dsp以及预设时间t1可基于实际的使用需求而被调整。在一些实施例中,预设速度dsp以及预设时间t1可基于实际的使用需求而被调整,并不以本实施例为限。
[0029]
请同时参考图1以及图6,图6是依据本发明一实施例所绘示的过载的第二级别判定示意图。在初期,举升机构110上升时的位移速度sp1会大于预设速度dsp,因此堆高机的运作是正常的。然而,举升机构110到达高度h1时,举升机构110开始上下起伏而使位移量等于0,进而无法到达目标高度h2。上述的情况例如是举升机构110在高度h1开始乘载到较重的货物,或者是举升机构110的移动方向被其他物件(如,货架)阻挡,使得驱动装置120无法负荷而使举升机构110发生上下震荡。控制装置140会对位移速度sp1低于预设速度dsp(例如是0.1米/秒)的维持时间进行计时。举升机构110的位移速度sp1会在0米/秒附近的速度呈现上下起伏,并且维持时间到达预设时间t1时,控制装置140也会判定出过载的级别为第二级别。
[0030]
图5所示的第一级别的危险程度会被判断大于图6所示的第二级别的危险程度。
[0031]
请同时参考图1以及图7,图7是依据本发明一实施例所绘示的过载的第三级别判定示意图。当举升机构110到达高度h1时,举升机构110的位移速度sp1大于0米/秒并且小于预设速度dsp。上述的情况例如是举升机构110在高度h1开始乘载到略重的货物,使得举升机构110的位移速度sp1下降并维持大于0米/秒并且小于预设速度dsp的速度区间。控制装置140会对位移速度sp1低于预设速度dsp的维持时间进行计时。当位移速度sp1大于0并且小于预设速度dsp,并且维持时间到达预设时间t1时,所述控制装置140判定出过载的级别为第三级别。
[0032]
图6所示例出的第二级别的危险程度会被判断大于图7所示的第三级别的危险程度。应能理解的是,图5所示的第一级别的危险程度会被判断为大于第三级别的危险程度。
[0033]
综上所述,本发明的实施例至少具有以下其中一个优点或功效。本发明的控制系
统以及控制方法能够依据举升机构的位移量获得举升机构的位移速度,并依据位移速度判断举升机构是否过载。当控制装置判断过载发生时,本发明的控制系统以及控制方法停止驱动举升机构。本发明的控制系统以及控制方法是考量到堆高机的实际举升状况来判断是否过载。如此一来,堆高机的使用安全性能够被大幅提高。
[0034]
惟以上所述者,仅为本发明之较佳实施例而已,当不能以此限定本发明实施之范围,即凡依本发明权利要求书及发明内容所作之简单的等效变化与修改,皆仍属本发明专利涵盖之范围内。另外本发明的任一实施例或权利要求不须达成本发明所揭露之全部目的或优点或特点。此外,摘要和发明名称仅是用来辅助专利文件检索,并非用来限制本发明之权利范围。此外,本说明书或权利要求书中提及的“第一”、“第二”等用语仅用以命名元件(element)的名称或区别不同实施例或范围,而并非用来限制元件数量上的上限或下限。
[0035]
附图标记说明:
[0036]
100:控制系统
[0037]
110:举升机构
[0038]
120:驱动装置
[0039]
130:感测装置
[0040]
140:控制装置
[0041]
s110~s140:步骤
[0042]
s210~s270:步骤
[0043]
s310~s380:步骤
[0044]
h1:高度
[0045]
h2:目标高度
[0046]
sp1:位移速度
[0047]
dsp:预设速度
[0048]
t1:预设时间。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1