一种皮带机智能管理系统的管理方法与流程
[0001]
本发明涉及皮带机输送,尤其是涉及一种皮带机智能管理系统的管理方法。
背景技术:
[0002]
皮带机是散货运输中的一种常见机械,传统的皮带机管理,主要是通过人工利用一些辅助工具进行巡检,故障处理等工作,近年来虽然出现了一些皮带机自动巡检机器人等装置,实现了皮带机的巡检工作,但是对于传统人工巡检时的故障处置工作,并没有实现替代。皮带机现场出现的一些常见故障,例如跑偏,地面积料,料斗堵塞等,仍然需要人工去修复处置。
[0003]
现有技术中的皮带机只能管理系统如cn201510023774.0公开了一种一种矿用皮带运输机巡检机器人控制系统和控制方法,该控制系统由plc控制箱和巡检机器人装置构成,plc控制箱包括:西门子s7-200cn系列plc、轴编码器、pc显示器、防爆开关、停车开关、过卷限位开关;巡检机器人装置包括:机器人本体、音频传感器、烟雾传感器、红外温度传感器一、红外温度传感器二、摄像机一、摄像机二、摄像机三。plc控制箱通过系统控制软件实现对皮带机巡检机器人的控制,该控制系统可实时采集皮带运输机运行中的各种数据信息,及时发现皮带运输机工作过程中产生的问题,发现故障时及时报警处理,为皮带运输机安全生产提供了保障。
[0004]
上述技术方案中存在以下缺陷,由于皮带机在使用过程中的状况千变万化,上述管理系统中对于异常工况的判断首先基于监测到故障信号后由控制系统中设定的模型进行紧急处理,其无法实现自我升级功能,该控制无法依靠自身进行不断更新升级,此外上述系统中拍摄皮机异常状态的摄像机始终处于开启状态,由于机器人一直移动,其电能储备有限,无法达到节能效果。
技术实现要素:
[0005]
本发明的目的在于克服现有技术中存在的缺陷,提供一种皮带机智能管理系统的管理方法,智能化程度高,能够实现自我升级更新,而且拍摄皮带机异常画面的摄像机仅当出现异常时打开,节能效果好。
[0006]
1、为实现上述技术效果,本发明的技术方案为:一种皮带机智能管理系统的管理方法,该皮带机智能管理系统包括监测组件、分析决策组件以及智能处理组件;所述监测组件包括智能巡检小车、固定设置于皮带机上方用于拍摄皮带机承载面画面的第一可见光相机、固定设置于所述皮带机侧方用于拍摄皮带机回程面画面的第二可见光相机、固定设置于皮带机的料斗上方用于拍摄料斗内积矿状态的第三可见光相机、设置于所述皮带机驱动部位用于监测皮带机的驱动部位表面温度的第一红外相机,所述巡检小车包括长度方向沿着皮带机输送方向延伸的巡检轨道、沿着所述巡检轨道滑动的小车本体、驱动所述小车本体移动的驱动机构,所述小车本体的底部转动设置有与所述巡检轨道相配合的移动滚轮,所述小车本体内设置有监控仓以及电池仓,所述监控仓内设置有用于扫描
皮带机地面的积矿高度的激光雷达、用于获取皮带机托混的温度数据的第二红外相机、用于拍摄皮带机异常状态下地面积矿画面的第四可见光相机,所述电池仓内设置有对所述激光雷达、所述第二红外相机以及所述第四可见光相机进行供电的供电电池;所述分析决策组件包括服务器、与所述服务器相连接的皮带机自身控制系统plc、安装于所述服务器内的modbus服务器、与所述皮带机自身控制系统plc进行组态的modbus组态硬件,所述第一可见光相机、所述第二可见光相机、所述第三可见光相机、所述激光雷达、所述第一红外相机、所述第二红外相机、所述第四可见光相机均与所述服务器相电气连接;所述智能处理组件包括用于对皮带机的输送皮带进行纠偏的纠偏机构、用于对皮带机的料斗内进行积矿处理的积矿处理机构、用于清理皮带机地面上积矿的刮板机;该管理方法包括:所述激光雷达探测到地面积矿高度,通过所述4g通讯模块,经过万网传输至服务器,服务器接收到地面积矿高度数值高于预设值时发出控制信号至刮板机的驱动装置启动刮板机进行地面积矿清理;所述第一可见光相机拍摄的图像通过网络传输至所述服务器,服务器对该图像的分析决策步骤如下:所述服务器利用事先训练好的皮带机料面异物识别模型,对所述图像进行在线识别,若识别料面异物的置信度大于设定阈值时,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机;所述服务器通过对所述图像进行灰度处理后得到第一图像,从第一图像中截取两个托辊架之间的图像得到第二图像,通过第二图像到皮带边缘的像素值,从而计算出皮带当前的跑偏位置,当皮带跑偏位置超过预设值后,所述服务器发出指令,所述指令通过网络传输至纠偏机构,进行皮带机的实时调偏;所述服务器通过对所述图像进行边缘直线度识别,可以判断出皮带是否出现缺口,撕边等异常状态,当异常状态超过设定阈值时,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机;所述第二可见光相机,拍摄的图像通过网络传输至所述服务器,所述服务器通过事先训练号的识别模型识别出回程面上有较多落矿时,判断出皮带发生纵向撕裂,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机;所述第三可见光相机,拍摄的图像通过网络传输至所述服务器,所述服务器通过事先训练号的识别模型识别后进行如下处理:所述服务器识别图像结果为料斗积矿时,传输控制指令至积矿处理机构进行料斗积矿清理;所述服务器识别图像结果为料斗堵塞时,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机;所述第一红外相机,实时获取的皮带机驱动电机,电机输出轴,减速箱,联轴器,皮带机
表面的温度数据通过网络传输至所述服务器,当温度数据超过预设值时,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机。
[0007]
进一步改进的是,所述服务器与所述第一可见光相机、所述第二可见光相机、所述第三可见光相机、所述激光雷达、所述第一红外相机、所述第二红外相机、所述第四可见光相机通过4g通讯模块相连接。
[0008]
进一步改进的是,所述第二红外相机为分辨率为32*32的红外相机。
[0009]
进一步改进的是,所述供电电池为可拆卸充电电池。
[0010]
进一步改进的是,所述驱动机构包括驱动轮、驱动所述驱动轮转动的驱动电机、绕设于所述驱动轮上的牵引绳、转动设置于所述小车本体顶部的两个拉绳轮,所述牵引绳分别绕过两个所述拉绳轮。
[0011]
进一步改进的是,所述驱动机构还包括位置编码器。
[0012]
进一步改进的是,所述积矿处理机构包括设置于皮带机的料斗内的滴水喷头、与所述滴水喷头相连通的滴水管道、与所述滴水管道相连通的水源、设置于所述滴水管道上的电磁阀,所述服务器与所述电磁阀相电气连接。
[0013]
进一步改进的是,所述纠偏机构包括转动设置于皮带机的机架上的安装架、对称且固定设置于所述安装架两端的托辊架、分别转动设置于相应侧的所述托辊架上的皮带支撑托辊、驱动所述安装架转动的驱动机构,所述安装架的转动轴心线沿着铅锤方向延伸,所述皮带支撑托辊的转动轴心线倾斜于水平面,所述驱动机构包括与所述皮带机的机架相转动连接的电动推杆、与所述安装架相固定连接的摆臂,所述电动推杆的活塞杆与所述摆臂相转动连接。
[0014]
进一步改进的是,所述安装架与所述皮带机的机架之间设置有支撑导向机构,所述支撑导向机构包括固定设置于所述托辊架底部的导轨支撑板、转动设置于所述皮带机的机架上且与所述导轨支撑板相配合的导向滚轮,所述导轨支撑板呈圆弧形,且其圆心与所述安装架的转动轴心相重合。
[0015]
进一步改进的是,所述刮板机包括设置于矿料输送架下方的回收槽、设置于所述回收槽内的刮料板,所述回收槽的长度方向沿着所述矿料输送架的输送方向延伸,所述回收槽的出料端与皮带机的料斗相连通,所述刮料板与所述回收槽之间设置有驱动所述刮料板将回收槽内落料由其一端刮向其出料端的驱动机构,所述驱动机构包括转动设置于所述回收槽两端的第一轮轴以及第二轮轴、驱动所述第一轮轴转动的动力装置、固定设置于所述第一轮轴上的第一转轮、固定设置于所述第二轮轴上的第二转轮、绕设于所述第一转轮与所述第二转轮上的柔性输送件,所述刮料板固定设置于所述柔性输送件上。
[0016]
本发明的优点和有益效果在于:通过设置了modbus服务器以及modbus组态硬件,当服务器对监测的图像进行处理识别后,判断皮带出现异常状态,当异常状态超过设定阀值时,服务器向modbus服务器的寄存器内持续写入异常竖直,皮带自身控制铣孔plc通过modbus组态硬件实时扫描modbus服务,读取异常数值后控制皮带机进行停机或者智能处理组件进行智能化处理,其具备了modbus服务器的寄存器数据池,从而能够实现数据池的不断更新从而实现自我不断学习以及升级,另外对于用于拍摄皮带机异常状态下地面积矿画面的第四可见光相机,其仅仅激光雷达扫描到地面积矿高度或第二红外相机获取的皮带机
托辊温度超过设定的阈值时,第四可见光相机打开拍摄地面积矿的图片,然后通过4g通讯模块进行数据上传,大大节省能耗。
附图说明
[0017]
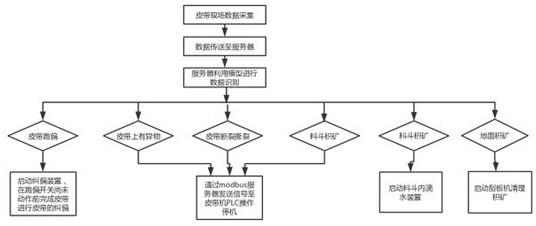
图1是皮带机智能管理流程图;图2是智能处理组件示意图;图3是刮板机示意图;图4是纠偏机构示意图;图5是巡检小车示意图;图6是小车本体示意图;图7小车运行流程图;图8是服务器将第一可见光相机传输的图像进行灰度处理后的图片;图9是对图8的图片进行截图的图片。
[0018]
图中:1、皮带机的机架;2、料斗;3、刮板机;4、刮料板;5、小车本体;6、移动滚轮;7、巡检轨道;8、拉绳轮;9、安装架;10、托辊架;11、皮带支撑托辊;12、电动推杆;13、滴水喷头。
具体实施方式
[0019]
下面结合附图和实施例,对本发明的具体实施方式作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0020]
如图1-图9所示,皮带机智能管理系统的管理方法,包括监测组件、分析决策组件以及智能处理组件;所述监测组件包括智能巡检小车、固定设置于皮带机上方用于拍摄皮带机承载面画面的第一可见光相机、固定设置于所述皮带机侧方用于拍摄皮带机回程面画面的第二可见光相机、固定设置于皮带机的料斗2上方用于拍摄料斗2内积矿状态的第三可见光相机、设置于所述皮带机驱动部位用于监测皮带机的驱动部位表面温度的第一红外相机,所述巡检小车包括长度方向沿着皮带机输送方向延伸的巡检轨道7、沿着所述巡检轨道7滑动的小车本体5、驱动所述小车本体5移动的驱动机构,所述小车本体5的底部转动设置有与所述巡检轨道7相配合的移动滚轮6,所述小车本体5内设置有监控仓以及电池仓,所述监控仓内设置有用于扫描皮带机地面的积矿高度的激光雷达、用于获取皮带机托混的温度数据的第二红外相机、用于拍摄皮带机异常状态下地面积矿画面的第四可见光相机,所述电池仓内设置有对所述激光雷达、所述第二红外相机以及所述第四可见光相机进行供电的供电电池,所述巡检轨道7使用聚乙烯材质制成;所述第一可见光相机,安装于皮带机上方且皮带机一侧的边缘在拍摄画面中尽量与画面边缘垂直,所述第二可见光相机,安装于皮带机侧方,用于拍摄皮带机的回程面图像;用于拍摄皮带机的承载面画面,所述第三可见光相机,安装于皮带机料斗2上方靠近侧边的位置,用于拍摄料斗2侧边的积矿情况;所述第一红外相机,安装于皮带机驱动部位,用于获取皮带机驱动电机,电机输出轴,减速箱,联轴器,皮带机表面的温度,所述激光雷达用于扫描皮带机地面的积矿高度,所述第二红外相机使用分辨率为32*32的低分辨率的红外相机用于获取皮带机托混的温度数据,当激光雷达扫描到地面积矿高度或第二红外相机获取的皮
带机托辊温度超过设定的阈值时,第四可见光相机打开拍摄地面积矿的图片,然后通过4g通讯模块进行数据上传,所述小车本体5上搭载的第四可见光相机仅在异常状态下拍摄,所述4g通讯模块仅在异常状态下将异常数据传输至服务器,所述小车本体5整体功耗较低。
[0021]
所述分析决策组件包括服务器、与所述服务器相连接的皮带机自身控制系统plc、安装于所述服务器内的modbus服务器、与所述皮带机自身控制系统plc进行组态的modbus组态硬件,所述第一可见光相机、所述第二可见光相机、所述第三可见光相机、所述激光雷达、所述第一红外相机、所述第二红外相机、所述第四可见光相机均与所述服务器相电气连接,所述服务器安装有2个rj45网卡,一个rj45网卡与皮带机智能管理系统的管理方法内各个设备以及万网连接,另外一个rj45网卡与皮带机自身控制系统的内网plc连接,所述服务器上,安装有用于数据分析的各类软件。
[0022]
所述智能处理组件包括用于对皮带机的输送皮带进行纠偏的纠偏机构、用于对皮带机的料斗2内进行积矿处理的积矿处理机构、用于清理皮带机地面上积矿的刮板机3。
[0023]
具体的管理方法如下:所述激光雷达探测到地面积矿高度,通过所述4g通讯模块,经过万网传输至服务器,服务器接收到地面积矿高度数值高于预设值时发出控制信号至刮板机3的驱动装置启动刮板机3进行地面积矿清理;所述第一可见光相机拍摄的图像通过网络传输至所述服务器,服务器对该图像的分析决策步骤如下:所述服务器利用事先训练好的皮带机料面异物识别模型,对所述图像进行在线识别,若识别料面异物的置信度大于设定阈值时,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机;所述服务器通过对所述图像进行灰度处理后得到图8,从所示图8中截取两个托辊架10之间的图像得到图9,通过所示图9到皮带边缘的像素值,从而计算出皮带当前的跑偏位置,当皮带跑偏位置超过预设值后,所述服务器发出指令,所述指令通过网络传输至纠偏机构,进行皮带机的实时调偏。
[0024]
所述服务器通过对所述图像进行边缘直线度识别,可以判断出皮带是否出现缺口,撕边等异常状态,当异常状态超过设定阈值时,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机。
[0025]
所述第二可见光相机,拍摄的图像通过网络传输至所述服务器,所述服务器通过事先训练号的识别模型识别出回程面上有较多落矿时,判断出皮带发生纵向撕裂,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机。
[0026]
所述第三可见光相机,拍摄的图像通过网络传输至所述服务器,所述服务器通过事先训练号的识别模型识别后进行如下处理:所述服务器识别图像结果为料斗2积矿时,传输控制指令至所述管道电磁阀,开启滴水装置,滴水管道出水进行料斗2积矿清理。
[0027]
所述服务器识别图像结果为料斗2堵塞时,所述服务器向所述modbus服务器9的保
持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机。
[0028]
所述第一红外相机,实时获取的皮带机驱动电机,电机输出轴,减速箱,联轴器,皮带机表面的温度数据通过网络传输至所述服务器,当温度数据超过预设值时,所述服务器向所述modbus服务器的保持寄存器内持续10s写入异常数值,皮带机自身控制系统plc通过所述modbus组态硬件实时扫描modbus服务器,读取所述异常数值后,控制皮带机停机。
[0029]
本实施例中优选地,所述服务器与所述第一可见光相机、所述第二可见光相机、所述第三可见光相机、所述激光雷达、所述第一红外相机、所述第二红外相机、所述第四可见光相机通过4g通讯模块相连接。
[0030]
所述供电电池为可拆卸充电电池,方便通过更换电池来补充电量,保证续航能力。
[0031]
本实施例中优选地,所述驱动机构包括驱动轮、驱动所述驱动轮转动的驱动电机、绕设于所述驱动轮上的牵引绳、转动设置于所述小车本体5顶部的两个拉绳轮8,所述牵引绳分别绕过两个所述拉绳轮8,所述驱动机构还包括位置编码器,除此以外驱动机构还可以采用气缸或者采用丝杠等,气缸结构与电动推杆12类似,不再赘述,当使用丝杠时,其结构为,在皮带机的机架1上转动设置丝杠,由电机驱动转动,而安装架9上转动设置螺套,丝杠与该螺套配合使用。
[0032]
本实施例中优选地,所述积矿处理机构包括设置于皮带机的料斗2内的滴水喷头13、与所述滴水喷头13相连通的滴水管道、与所述滴水管道相连通的水源、设置于所述滴水管道上的电磁阀,所述服务器与所述电磁阀相电气连接。
[0033]
本实施例中优选地,所述纠偏机构包括转动设置于皮带机的机架1上的安装架9、对称且固定设置于所述安装架9两端的托辊架10、分别转动设置于相应侧的所述托辊架10上的皮带支撑托辊11、驱动所述安装架9转动的驱动机构,所述安装架9的转动轴心线沿着铅锤方向延伸,所述皮带支撑托辊11的转动轴心线倾斜于水平面,所述驱动机构包括与所述皮带机的机架1相转动连接的电动推杆12、与所述安装架9相固定连接的摆臂,所述电动推杆12的活塞杆与所述摆臂相转动连接。
[0034]
为了保证整体结构的稳定性,本实施例中优选地,所述安装架9与所述皮带机的机架1之间设置有支撑导向机构,所述支撑导向机构包括固定设置于所述托辊架10底部的导轨支撑板、转动设置于所述皮带机的机架1上且与所述导轨支撑板相配合的导向滚轮,所述导轨支撑板呈圆弧形,且其圆心与所述安装架9的转动轴心相重合。
[0035]
本实施例中优选地,所述刮板机3包括设置于矿料输送架下方的回收槽、设置于所述回收槽内的刮料板4,所述回收槽的长度方向沿着所述矿料输送架的输送方向延伸,所述回收槽的出料端与皮带机的料斗2相连通,所述刮料板4与所述回收槽之间设置有驱动所述刮料板4将回收槽内落料由其一端刮向其出料端的驱动机构,所述驱动机构包括转动设置于所述回收槽两端的第一轮轴以及第二轮轴、驱动所述第一轮轴转动的动力装置、固定设置于所述第一轮轴上的第一转轮、固定设置于所述第二轮轴上的第二转轮、绕设于所述第一转轮与所述第二转轮上的柔性输送件,所述刮料板4固定设置于所述柔性输送件上,所述第一转轮以及所述第二转轮均为链轮,所述柔性输送件为与链轮配合的链条,除此以外第一转轮以及第二转轮还可以采用同步轮,而柔性输送件可以采用与之配套的同步带。
[0036]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人
员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1