一种无人驾驶收集车上的智能抓取型机械装置及其控制方法与流程
一种无人驾驶收集车上的智能抓取型机械装置及其控制方法
1.应用领域
2.本发明涉及机械装置领域,特别是一种无人驾驶收集车上的智能抓取型机械装置及其控制方法。
背景技术:
3.生活垃圾的处理方法大致可分为:焚烧、填埋、分选回收再利用。目前处理生活垃圾最好的方法应该是分选回收再利用。因为焚烧垃圾会释放出很多有毒气体。一方面污染大气,另一方面危害人体健康。而填埋也不是好办法。首先,填埋垃圾要侵占大量宝贵土地,而且随着城市人口的增加,这种侵占会越来越严重。其次,将垃圾当作肥料,会使土地渣化严重,并且污染地下水。只有将垃圾进行按类分选后,便可以用各种不同的方法进行回收再利用。分选回收再利用应该是处理生活垃圾的最好方法。生活垃圾一般可分为四大类:可回收垃圾、厨余垃圾、有害垃圾和其他垃圾。目前常用的垃圾处理方法主要有综合利用、卫生填埋、焚烧和堆肥。可回收垃圾包括纸类、金属、塑料、玻璃等,通过综合处理回收利用,可以减少污染,节省资源。厨房垃圾包括剩菜剩饭、骨头、菜根菜叶等食品类废物,经生物技术就地处理堆肥,每吨可生产0.3吨有机肥料。有害垃圾包括废电池、废日光灯管、废水银温度计、过期药品等,这些垃圾需要特殊安全处理。
4.但是,迄今为止,垃圾收集处理还是主要依赖于环卫工人起早贪黑地开着环卫车进行垃圾收集,环卫车的容量有限,很多时候垃圾会溢出或者掉落等,不仅影响市容市貌,也给环卫工人的工作徒增了很多负担。并且,城市的环卫工作需要雇佣很多很多环卫工人,这样一来需要花费大量的人力物力,效率也不一定会有所提高,而且垃圾桶的处理不及时也非常容易滋生细菌等,所以,解决垃圾出来问题迫在眉睫。
技术实现要素:
5.本发明克服了现有技术的不足,提供了一种无人驾驶收集车上的智能抓取型机械装置,为达到上述目的,本发明采用的技术方案为:一种无人驾驶收集车上的智能抓取型机械装置,包括:车身以及抓取手,车身包括控制室以及收集箱,控制室与收集箱通过底板固定连接,控制室的外壁设置有若干图像采集设备;
6.控制室的内部包括:控制台以及座位,控制台的内部设置有处理器,控制台包括由信号输入设备;
7.收集箱的一侧设置有若干箱门,另一侧固定设置有滑道,滑道活动连接有若干抓取手,若干抓取手能够沿滑道滑动,抓取手包括第一关节、第二关节以及抓取部,抓取部设置有检测设备;
8.收集箱的内部设置有若干隔板,若干隔板呈等距间隔排列,隔板将收集箱的内部空间分为若干垃圾室,若干垃圾室的内部均设置有传感器。
9.本发明一个较佳实施例中,收集箱的侧壁设置有若干消毒喷头,若干消毒喷头的内部均设置有消毒液,若干消毒喷头均连接有消毒瓶,消毒瓶的内部装有消毒液。
10.本发明一个较佳实施例中,滑道与收集箱等长,箱门的数量与垃圾室的数量相等。
11.本发明一个较佳实施例中,第一关节的一端连接有滑动部,滑动部设置于滑道的内部;第一关节的另一端铰接有第二关节,第二关节连接有抓取部,抓取部为橡胶材料制成。
12.本发明一个较佳实施例中,信号输入设备包括键盘、鼠标、触摸屏、按钮以及声控采集设备的一种或多种的组合;控制台的一侧设置有显示屏。
13.本发明一个较佳实施例中,还包括有若干车轮,若干车轮均连接有电机的输出端。
14.本发明一个较佳实施例中,收集箱的一侧设置有若干箱门,收集箱的顶部设置有伸缩盖,伸缩盖的一边与收集箱的一边固定连接,伸缩盖的两边与收集箱的两边通过滑道连接。
15.本发明还提供了一种无人驾驶收集车上的智能抓取型机械装置的控制方法,应用于任一一种无人驾驶收集车上的智能抓取型机械装置:
16.获取垃圾桶位置信息,根据地图算法,计算最优路线,根据最优路线生成移动指令;
17.根据垃圾桶位置信息,计算抓取手位置修正数据,生成抓取指令;
18.获取抓取部与垃圾桶的距离a,当a小于预定阈值时,生成位移指令;
19.采集位移完毕信号,识别垃圾桶颜色信息b,计算b的色度值,获取垃圾室的目标色度信息,生成对应匹配的移动指令;
20.获取移动完毕信号,生成倾倒指令;
21.计算倾倒时间t,若t大于预定阈值,则生成垃圾桶复位指令;
22.根据垃圾桶复位指令,对垃圾桶位置进行复位。
23.本发明一个较佳实施例中,若t大于预定阈值,则同时生成消毒指令;
24.计算消毒时间t2,当t2大于预定阈值时,则生成停止消毒指令。
25.本发明一个较佳实施例中,获取障碍物信息,计算车身的当前位置与障碍物的距离w,当w小于预定阈值时,生成减速指令;
26.每间隔3秒获取一次交通信号灯的图像信息,对图像信息进行识别得到准行信号,与目标路线进行对比;
27.若目标路线为直行,且准行信号为左转或/和右转,则生成停车指令;
28.若目标路线为直行,且准行信号为直行,则生成行进指令。
29.本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
30.(1)本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,如可回收垃圾、有害垃圾等,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。
31.(2)控制室的外壁设置有若干图像采集设备,同时可以实时探测与周边障碍物之间的距离,用于实现避障等功能;控制室内设置有座位,在无人驾驶全自动收集的基础上,
还可以有工作人员进行实时的监督,如发生特殊情况,工作人员也可以进行实时的调整;控制台包括由信号输入设备,工作人员可以通过信号输入设备来调整整个装置的工作状态,同时可以根据实际情况,实时调整整个装置的功能使用等。
32.(3)收集箱的一侧设置有若干箱门,通过打开箱门可以将收集好的垃圾倒出,再进行下一步的集中处理;另一侧固定设置有滑道,若干抓取手能够沿滑道滑动,抓取手在抓住垃圾桶后就可以进行移动,移动到对应的垃圾室之后在进行倾倒,高效完成垃圾分类;抓取部设置有检测设备,可以检测抓取部与垃圾桶之间的距离,便于根据距离来计算运动轨迹,顺利完成抓取倾倒。隔板将收集箱的内部空间分为若干垃圾室,不同的垃圾桶可以倒在不同的垃圾室里,这样一来就可以把垃圾分类收集,从而进行分类处理,简洁又高效;若干垃圾室的内部均设置有传感器,可以实时监测垃圾室内的垃圾重量,在达到垃圾车的限重值的时候发出预警,避免超重,安全运行。
33.(4)收集箱的侧壁设置有若干消毒喷头,垃圾暴露在空气中不可避免的会滋生很多细菌,对垃圾进行及时的消毒可以有效避免细菌滋生,同时可以对空气起到一个净化消毒的作用。抓取部为橡胶材料制成,摩擦力大,抓取动作稳固,同时还不会损伤垃圾桶。收集箱的顶部设置有伸缩盖,伸缩盖可以在倾倒垃圾时自动打开,在行驶过程中自动关闭,既能够方便垃圾车进行收集,又可以在行驶过程中避免垃圾掉落,封闭时有效遏制了恶臭气味的扩散。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他实施例的附图。
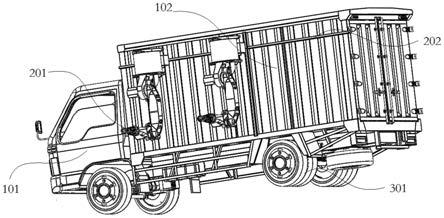
35.图1为抓取型机械装置示意图;
36.图2为垃圾室示意图;
37.图3为控制室示意图;
38.图4为箱门结构示意图;
39.图5为抓取手示意图;
40.图6为控制方法流程图。
41.附图标记如下说明:101、控制室;102、收集箱;201、抓取手;2011、滑动部;2012、第一关节;2013、第二关节;2014、抓取部;202、滑道;301、车轮;401、垃圾室;402、隔板;403、箱门;501、显示屏;502、处理器。
具体实施方式
42.为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成,需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
43.在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、
“
前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
44.在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本申请中的具体含义。
45.为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
46.本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,如可回收垃圾、有害垃圾等,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。
47.如图1
‑
5所示,一种无人驾驶收集车上的智能抓取型机械装置,包括:车身以及抓取手201,车身包括控制室101以及收集箱102,控制室101与收集箱102通过底板固定连接,控制室101的外壁设置有若干图像采集设备;控制室101的内部包括:控制台以及座位,控制台的内部设置有处理器502,控制台包括由信号输入设备。
48.在此需要进行说明的一点是,控制室101的外壁设置有若干图像采集设备,同时可以实时探测与周边障碍物之间的距离,用于实现避障等功能;控制室101内设置有座位,在无人驾驶全自动收集的基础上,还可以有工作人员进行实时的监督,如发生特殊情况,工作人员也可以进行实时的调整;控制台包括由信号输入设备,工作人员可以通过信号输入设备来调整整个装置的工作状态,同时可以根据实际情况,实时调整整个装置的功能使用等。
49.收集箱102的一侧设置有若干箱门403,另一侧固定设置有滑道202,滑道202活动连接有若干抓取手201,若干抓取手201能够沿滑道202滑动,抓取手201包括第一关节2012、第二关节2013以及抓取部2014,抓取部2014设置有检测设备。
50.在此需要进行说明的一点是,收集箱102的一侧设置有若干箱门403,通过打开箱门403可以将收集好的垃圾倒出,再进行下一步的集中处理;另一侧固定设置有滑道202,若干抓取手201能够沿滑道202滑动,抓取手201在抓住垃圾桶后就可以进行移动,移动到对应的垃圾室401之后在进行倾倒,高效完成垃圾分类;抓取部2014设置有检测设备,可以检测
抓取部2014与垃圾桶之间的距离,便于根据距离来计算运动轨迹,顺利完成抓取倾倒。
51.收集箱102的内部设置有若干隔板402,若干隔板402呈等距间隔排列,隔板402将收集箱102的内部空间分为若干垃圾室401,若干垃圾室401的内部均设置有传感器。
52.在此需要进行说明的一点是,隔板402将收集箱102的内部空间分为若干垃圾室401,不同的垃圾桶可以倒在不同的垃圾室401里,这样一来就可以把垃圾分类收集,从而进行分类处理,简洁又高效;垃圾室401内部设置的传感器可以是重力传感器,重力传感器可以实时监测垃圾室401内的垃圾重量,在达到垃圾车的限重值的时候发出预警,避免超重,安全运行。
53.收集箱102的侧壁设置有若干消毒喷头,若干消毒喷头的内部均设置有消毒液,若干消毒喷头均连接有消毒瓶,消毒瓶的内部装有消毒液。
54.在此需要进行说明的一点是,收集箱102的侧壁设置有若干消毒喷头,垃圾暴露在空气中不可避免的会滋生很多细菌,对垃圾进行及时的消毒可以有效避免细菌滋生,同时可以对空气起到一个净化消毒的作用。
55.滑道202与收集箱102等长,箱门403的数量与垃圾室401的数量相等。
56.第一关节2012的一端连接有滑动部2011,滑动部2011设置于滑道202的内部;第一关节2012的另一端铰接有第二关节2013,第二关节2013连接有抓取部2014,抓取部2014为橡胶材料制成。
57.在此需要进行说明的一点是,橡胶材料的摩擦力大,抓取动作稳固,同时还不会损伤垃圾桶。
58.信号输入设备包括键盘、鼠标、触摸屏、按钮以及声控采集设备的一种或多种的组合;控制台的一侧设置有显示屏501。
59.在此需要进行说明的一点是,工作人员可以通过很多方式对整个装置进行控制,显示屏501上可以实时显示车辆周边的图像信息、距离障碍物的数值信息、时间信息、各项传感器检测到的数值等各项信息,便于工作人员实时进行调整。
60.还包括有若干车轮301,若干车轮301均连接有电机的输出端。
61.收集箱102的一侧设置有若干箱门403,收集箱102的顶部设置有伸缩盖,伸缩盖的一边与收集箱102的一边固定连接,伸缩盖的两边与收集箱102的两边通过滑道202连接。
62.在此需要进行说明的一点是,伸缩盖可以在倾倒垃圾时自动打开,在行驶过程中自动关闭,既能够方便垃圾车进行收集,又可以在行驶过程中避免垃圾掉落,封闭时有效遏制了恶臭气味的扩散。
63.如图6所示,本发明还提供了一种无人驾驶收集车上的智能抓取型机械装置的控制方法,应用于任一一种无人驾驶收集车上的智能抓取型机械装置:
64.获取垃圾桶位置信息,根据地图算法,计算最优路线,根据最优路线生成移动指令;
65.根据垃圾桶位置信息,计算抓取手201位置修正数据,生成抓取指令;
66.获取抓取部2014与垃圾桶的距离a,当a小于预定阈值时,生成位移指令;
67.采集位移完毕信号,识别垃圾桶颜色信息b,计算b的色度值,获取垃圾室401的目标色度信息,生成对应匹配的移动指令;
68.获取移动完毕信号,生成倾倒指令;
69.计算倾倒时间t,若t大于预定阈值,则生成垃圾桶复位指令;
70.根据垃圾桶复位指令,对垃圾桶位置进行复位。
71.在此需要进行说明的一点是,本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,如可回收垃圾、有害垃圾等,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。
72.在此需要进行补充说明的一点是,在到达指定地点后,图像采集设备对周围的垃圾桶进行图像信息采集,并计算出垃圾桶的数量m,记完成收集的垃圾桶数量为n,在对一个垃圾桶进行收集并复位后,对n进行赋值n=n+1,当n=m时,则代表该地点的垃圾桶处理完毕,获取下一个地点的位置信息。
73.若t大于预定阈值,则同时生成消毒指令;
74.计算消毒时间t2,当t2大于预定阈值时,则生成停止消毒指令。
75.获取障碍物信息,计算车身的当前位置与障碍物的距离w,当w小于预定阈值时,生成减速指令;
76.每间隔3秒获取一次交通信号灯的图像信息,对图像信息进行识别得到准行信号,与目标路线进行对比;
77.若目标路线为直行,且准行信号为左转或/和右转,则生成停车指令;
78.若目标路线为直行,且准行信号为直行,则生成行进指令。
79.在此需要进行说明的一点是,每3秒获取一次交通等的图像信息,既符合交通灯的变化规律,又能够及时地对交通灯的变化进行识别并生成对应的指令,整个运动装置都遵守交通规则,不会影响到道路上的其他行人或者车辆。
80.本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,如可回收垃圾、有害垃圾等,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。
81.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1