立井提升钢丝绳罐道的稳罐补偿承接摇台的制作方法
[0001]
本实用新型涉及一种通用于矿山立井井口、井底及中间水平的稳罐补偿承接摇台,具体是一种适用于钢丝绳罐道的、用于吸收罐笼变化载荷、补偿提升钢丝绳伸长量的稳罐补偿承接摇台,属于矿山机械设备技术领域。
背景技术:
[0002]
矿山立井提升是矿井运输的主要方式,随着我国煤炭工业的发展,矿井副立井提升逐渐向深、重的方向发展,即提升深度超过800米、提升总重超过80吨。罐笼是矿山立井提升中上、下人员及物料的必备设备,罐道是罐笼的导向装置,通常可分为刚性罐道和挠性罐道两种。刚性罐道通常是将钢轨固定在井筒中各种金属型钢或特制的钢筋混凝土罐道梁上;而挠性罐道采用各种形式的钢丝绳,采用钢丝绳两端固定的方式进行安装。钢丝绳罐道是目前唯一的一种挠性罐道,与刚性罐道相比,钢丝绳罐道不需要设置罐道梁,具有安装工作量小、建设时间短、维护简便、高速运行、平稳可靠及通风阻力小等优点,在中深部矿井中应用较为普遍。
[0003]
但钢丝绳罐道的刚性远低于钢罐道,钢丝绳罐道的罐笼可移动量远大于刚性罐道的罐笼可移动量。《煤矿矿井采矿设计手册》有规定,采用钢丝绳罐道时,罐笼最突出部分和井壁、井梁之间的最小间隙为350mm,罐笼和罐笼之间的最小间隙为450mm,当设防撞绳时,罐笼之间的最小间隙为200mm。这就造成采用钢丝绳罐道的立井提升系统的罐笼与外部固定轨道的搭接定位是一大难题,通常需另设刚性罐道稳罐,针对深部矿井,罐笼往往还受到较大的提升钢丝绳弹性影响、存在较大的上下窜动问题,从而导致罐笼在中间水平的停罐位置进行停罐作业时往往存在上、下、左、右、前、后6个自由度。现有的中间水平的稳罐摇台装置针对刚性罐道可以获得较好的托罐稳罐效果,但针对钢丝绳罐道,一方面,为满足最小间隙为350mm的要求,通常设置尺寸较大的翻转托罐爪以实现翻转托罐爪翻出后能够托载在罐笼底部,不仅无形中增大设备体积、增大设备功耗,而且不便于井下安装;另一方面,现有的稳罐摇台装置往往对上下方向自由度的限定效果较好、对其他方向自由度的限定效果不够理想,不仅影响生产效率、而且存在较大的安全隐患。
技术实现要素:
[0004]
针对上述现有技术存在的问题,本实用新型提供一种立井提升钢丝绳罐道的稳罐补偿承接摇台,能够在稳固托罐稳罐的前提下实现罐笼内轨道与外部固定轨道的稳定可靠搭接,进而实现矿车进出安全畅通,特别适用于中深部矿井的钢丝绳罐道。
[0005]
为了实现上述目的,本立井提升钢丝绳罐道的稳罐补偿承接摇台包括机架部分、托罐部分、摇台部分和集中电控部分;
[0006]
所述的机架部分是框架结构,包括固定架体和移动架体;固定架体的顶端后部设有水平前后方向固定设置的道轨ⅰ;移动架体通过沿前后方向设置的滑移导向机构安装在固定架体内部,移动架体与固定架体之间还设有滑移导向驱动部件;移动架体的顶部设有
向前方伸出设置、且左右对称设置的罐笼顶靠夹持定位臂,罐笼顶靠夹持定位臂的前端是与罐笼的倒角立面角度配合的定位斜面结构;
[0007]
所述的托罐部分安装在移动架体内部,包括支撑座、转臂、限力补偿机构、托罐爪和限位块;支撑座固定安装在移动架体的后部;转臂的后端通过轴向方向沿左右方向设置的支撑轴承可转动安装在支撑座上、且转臂上设有可驱动转臂转动的转臂旋转驱动部件;限力补偿机构是伸缩缸结构,包括缸体、压簧板和压簧,压簧板滑移配合设置在缸体部分内部,压簧设置在缸体内部、且顶靠设置于压簧板与缸体的缸底之间,压簧板上安装设有与其同轴设置的缓冲杆、且缓冲杆向缸体外部伸出设置,限力补偿机构的缸体后端通过与其同轴固定连接的连杆与转臂的前端通过轴向方向沿左右方向设置的铰接轴ⅰ铰接安装连接;整体呈三角型结构的托罐爪的一个角是向前凸出的托爪结构,位于托爪结构下方的托罐爪的底角通过轴向方向沿左右方向设置的铰接轴ⅱ与缓冲杆的前端铰接安装连接,位于托爪结构后方的托罐爪的另一个角通过轴向方向沿左右方向设置的铰接轴ⅲ铰接安装在移动架体的前端;限位块对应转臂的位置固定设置在移动架体上,当转臂旋转驱动部件驱动转臂转动使铰接轴ⅰ的轴心越过限力补偿机构与转臂的铰接死点位置后,转臂可限位顶靠在限位块上;
[0008]
所述的摇台部分设置在固定架体的顶端前部,包括摇台和联动机构;摇台的后端底部铰接安装在固定架体上,摇台上固定设有沿前后方向设置的道轨ⅱ、且道轨ⅱ与道轨ⅰ对接设置;联动机构对应摇台的铰接位置定位设置在移动架体的顶部,联动机构是将移动架体沿前后方向的直线运动转换为摇台绕其铰接轴旋转进行圆周运动的结构,在移动架体向前滑移伸出时,联动机构控制摇台沿摇台的铰接中心向前翻转,在移动架体向后滑移缩入时,联动机构控制摇台沿摇台的铰接中心向后翻转;
[0009]
所述的集中电控部分包括控制器、移动架体滑移控制回路和托罐爪翻转控制回路,控制器分别与滑移导向驱动部件和转臂旋转驱动部件电连接。
[0010]
作为本实用新型的进一步改进方案,罐笼顶靠夹持定位臂的定位斜面结构上设有滚动轴线水平设置的导向辊轮。
[0011]
作为本实用新型的进一步改进方案,导向辊轮沿罐笼顶靠夹持定位臂的定位斜面结构的上下方向设置为多个。
[0012]
作为本实用新型的进一步改进方案,滑移导向机构上至少设有可限定移动架体前移距离的前移限位部件。
[0013]
作为本实用新型的进一步改进方案,移动架体上对应罐笼的位置设有距离传感器,距离传感器与集中电控部分的控制器电连接。
[0014]
作为本实用新型的进一步改进方案,托罐部分相对于移动架体左右对称设置为多套。
[0015]
作为本实用新型的进一步改进方案,多套托罐部分共用同一个转臂旋转驱动部件。
[0016]
作为本实用新型的进一步改进方案,缓冲杆是螺杆结构、且螺杆结构上设于与其螺纹配合的调力螺母,压簧板滑动配合套接在缓冲杆上。
[0017]
与现有技术相比,本立井提升钢丝绳罐道的稳罐补偿承接摇台由于在固定架体内设有移动架体和滑移导向驱动部件,且托罐部分设置在移动架体内,因此可以通过控制滑
移导向驱动部件实现移动架体大移动量地靠近或远离罐笼,进而可以在满足罐笼最突出部分和井壁、井梁之间的最小间隙为350mm要求的前提下,可以大大降低翻转托罐爪的结构尺寸,实现稳罐补偿承接摇台整体结构的扁平化、便于安装;由于移动架体上设有左右对称设置的罐笼顶靠夹持定位臂、且罐笼顶靠夹持定位臂的前端是与罐笼的倒角立面角度配合的定位斜面结构,因此移动架体向前滑移伸出靠近罐笼时,左右对称的罐笼顶靠夹持定位臂的定位斜面结构可呈夹持状贴靠在罐笼的倒角立面上,进而实现移动架体向前滑移伸出后即对罐笼左、右、前、后四个方向自由度限定的稳罐操作,而翻转托罐爪翻出托载在罐笼底部后可以实现对罐笼下方向自由度限定的稳罐操作,从而实现对罐笼五个方向自由度限定的稳罐操作、保证罐笼进出矿车的平稳性;由于设有限力补偿机构和限位块,且转臂限位顶靠在限位块上时铰接轴ⅰ的轴心越过限力补偿机构与转臂的铰接死点位置,因此在正常进行托罐作业时,在转臂、支撑座和机架的刚性支撑作用下,罐笼传递来的变化载荷作用在移动架体上,罐笼传递来的变化载荷动能一方面可以通过限力补偿机构进行吸收、另一方面可以通过滑移导向驱动部件进行吸收,进而不仅可以获得较大的缓冲行程、而且可以实现多级缓冲,从而可以实现更好的稳罐效果,特别适用于中深部矿井的钢丝绳罐道。
附图说明
[0018]
图1是本实用新型安装在钢丝绳罐道内中间水平的结构示意图;
[0019]
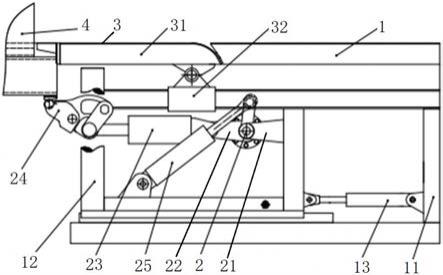
图2是本实用新型的结构示意图;
[0020]
图3是图2的仰视图;
[0021]
图4是本实用新型在翻转托罐爪翻出状态时托罐部分的结构示意图;
[0022]
图5是本实用新型限力补偿机构的结构示意图;
[0023]
图6是本实用新型在翻转托罐爪翻入状态时托罐部分的结构示意图。
[0024]
图中:1、机架部分,11、固定架体,12、移动架体,13、滑移导向驱动部件,14、罐笼顶靠夹持定位臂,141、导向辊轮,2、托罐部分,21、支撑座,22、转臂,221、铰接轴ⅰ,23、限力补偿机构,231、压簧板,232、压簧,233、缓冲杆,234、连杆,235、调力螺母,24、翻转托罐爪,241、铰接轴ⅱ,242、铰接轴ⅲ,25、转臂旋转驱动部件,26、限位块,3、摇台部分,31、摇台,32、联动机构,4、罐笼。
具体实施方式
[0025]
下面结合附图对本实用新型做进一步说明(以下以图2的左侧方向为前方进行描述)。
[0026]
如图2所示,本立井提升钢丝绳罐道的稳罐补偿承接摇台包括机架部分1、托罐部分2、摇台部分3和集中电控部分。
[0027]
所述的机架部分1是框架结构,包括固定架体11和移动架体12;固定架体11的顶端后部设有水平前后方向固定设置的道轨ⅰ;移动架体12通过沿前后方向设置的滑移导向机构安装在固定架体11内部,滑移导向机构可以是配合设置的导向轮和道轨结构、也可以是配合设置的导向凸起和导向凹槽结构等其他滑移导向结构,移动架体12与固定架体11之间还设有滑移导向驱动部件13,滑移导向驱动部件13可以是如图2所示的伸缩液压缸结构、也可以是电动机或液压马达带动的齿轮齿条结构等其他直线往复运动的驱动结构,通过控制
滑移导向驱动部件13的动作可以实现移动架体12通过滑移导向机构在固定架体11内部前后移动;如图3所示,移动架体12的顶部设有向前方伸出设置、且左右对称设置的罐笼顶靠夹持定位臂14,由于罐道井通常是横截面为圆形的结构,而立方体结构的罐笼4通常在竖直方向上的四个棱角位置设置倒角立面以适应圆形罐道井、最大限度避免因罐笼4的摆动造成罐道井内壁的损伤,因此罐笼顶靠夹持定位臂14的前端是与罐笼4的倒角立面角度配合的定位斜面结构,移动架体12向前滑移伸出时,左右对称的罐笼顶靠夹持定位臂14的定位斜面结构可呈夹持状贴靠在罐笼4的倒角立面上。
[0028]
所述的托罐部分2安装在移动架体12内部,如图4、图6所示,包括支撑座21、转臂22、限力补偿机构23、翻转托罐爪24和限位块26;支撑座21固定安装在移动架体12的后部;转臂22的后端通过轴向方向沿左右方向设置的支撑轴承可转动安装在支撑座21上、且转臂22上设有可驱动转臂22转动的转臂旋转驱动部件25,转臂旋转驱动部件25可以是通过电动机控制位于转臂22后端的旋转主轴旋转的旋转驱动结构、也可以是通过液压马达控制位于转臂22后端的旋转主轴旋转的旋转驱动结构、或者是通过转臂驱动液压缸连接固定设置在转臂22后端的摆杆来控制转臂22旋转的伸缩驱动结构等其他驱动结构;如图5所示,限力补偿机构23是伸缩缸结构,包括缸体、压簧板231和压簧232,压簧板231滑移配合设置在缸体部分内部,压簧232设置在缸体内部、且顶靠设置于压簧板231与缸体的缸底之间,压簧板231上安装设有与其同轴设置的缓冲杆233、且缓冲杆233向缸体外部伸出设置,限力补偿机构23的缸体后端通过与其同轴固定连接的连杆234与转臂22的前端通过轴向方向沿左右方向设置的铰接轴ⅰ221铰接安装连接;整体呈三角型结构的翻转托罐爪24的一个角是向前凸出的托爪结构,位于托爪结构下方的翻转托罐爪24的底角通过轴向方向沿左右方向设置的铰接轴ⅱ241与缓冲杆233的前端铰接安装连接,位于托爪结构后方的翻转托罐爪24的另一个角通过轴向方向沿左右方向设置的铰接轴ⅲ242铰接安装在移动架体12的前端;限位块26对应转臂22的位置固定设置在移动架体12上,正常托罐状态时,如图4所示,当转臂旋转驱动部件25驱动转臂22转动使铰接轴ⅰ221的轴心越过限力补偿机构23与转臂22的铰接死点位置后,转臂22可限位顶靠在限位块26上。
[0029]
所述的摇台部分3设置在固定架体11的顶端前部,包括摇台31和联动机构32;摇台31的后端底部铰接安装在固定架体11上,摇台31上固定设有沿前后方向设置的道轨ⅱ、且道轨ⅱ与道轨ⅰ对接设置;联动机构32对应摇台31的铰接位置定位设置在移动架体12的顶部,联动机构32是将移动架体12沿前后方向的直线运动转换为摇台31绕其铰接轴旋转进行圆周运动的结构,联动机构32可以是安装在摇台31铰接位置的齿轮和配合安装在移动架体12上的齿条结构、也可以是配合安装在摇台31铰接位置和移动架体12上的凸轮结构、或者是安装在摇台31铰接位置的扭簧和配合安装在摇台31铰接位置及移动架体12上的楔面结构等其他传动结构,在移动架体12向前滑移伸出时,联动机构32控制摇台31沿摇台31的铰接中心向前翻转逐步呈水平搭接状,在移动架体12向后滑移缩入时,联动机构32控制摇台31沿摇台31的铰接中心向后翻转逐步呈翘起让位状。
[0030]
所述的集中电控部分包括控制器、移动架体滑移控制回路和托罐爪翻转控制回路,控制器分别与滑移导向驱动部件13和转臂旋转驱动部件25电连接。
[0031]
本立井提升钢丝绳罐道的稳罐补偿承接摇台安装在钢丝绳罐道内中间水平的罐笼停靠位置使用时,如图1所示,需将本立井提升钢丝绳罐道的稳罐补偿承接摇台相对于罐
笼4前后对称设置为两套;初始状态时,移动架体12处于完全缩入在固定架体11内部的状态、翻转托罐爪24处于翻入移动架体12的状态、摇台31处于前端翘起的让位状态,此时罐道井内壁没有障碍物,罐笼4可顺利在罐道井内上下移动;
[0032]
在罐笼4停靠在罐笼停靠位置并就位后,控制器先启动移动架体滑移控制回路,控制器控制滑移导向驱动部件13动作使移动架体12向前滑移伸出,移动架体12前移靠近罐笼4的过程中通过联动机构32带动摇台31沿摇台31的铰接中心向前翻转,移动架体12前移至设定位置后,如图3所示,罐笼顶靠夹持定位臂14的定位斜面结构即贴靠在罐笼4的倒角立面上呈夹持状,同时摇台31呈水平状搭接在罐笼4的承接平台上,完成摇台搭接动作,此时罐笼4在竖直方向上的四个倒角立面分别被四个罐笼顶靠夹持定位臂14的定位斜面结构顶靠夹持,从而实现对罐笼4左、右、前、后四个方向自由度限定的稳罐操作;然后控制器启动托罐爪翻转控制回路,如图4所示,控制器控制转臂旋转驱动部件25驱动转臂22顺时针转动使铰接轴ⅰ221的轴心越过限力补偿机构23与转臂22的铰接死点位置后,转臂22即限位顶靠在限位块26上,同时转臂22通过限力补偿机构23带动翻转托罐爪24绕铰接轴ⅲ242的轴心顺时针旋转、使翻转托罐爪24的托爪结构顺时针旋转翻出托载在罐笼4的底部,完成托罐动作,此时由于铰接轴ⅰ221的轴心位于限力补偿机构23与转臂22的铰接死点位置的上方,因此罐笼4传递来的载荷可依次通过翻转托罐爪24、限力补偿机构23、转臂22和支撑座21作用在移动架体12上,而在转臂22、支撑座21和移动架体12的刚性支撑作用下,罐笼4传递来的变化载荷动能可以通过限力补偿机构23进行吸收,即通过缓冲杆233和压簧板231作用于压簧232,通过选用弹力不超过蹲罐极限的压簧232,可以实现变化载荷的动能被压簧232吸收;罐笼4传递来的变化载荷动能还可以通过滑移导向驱动部件13进行吸收,进而实现两级缓冲,从而实现对罐笼4下方向自由度限定的稳罐操作、保证罐笼4进出矿车平稳;
[0033]
完成进出矿车作业后、罐笼4需要提升或下降时,控制器先启动托罐爪翻转控制回路进行复位操作,如图6所示,控制器控制转臂旋转驱动部件25驱动转臂22逆时针转动,转臂22通过限力补偿机构23带动翻转托罐爪24绕铰接轴ⅲ242的轴心逆时针旋转,翻转托罐爪24的托爪结构即逆时针旋转翻入进行脱离罐笼4底端的让位动作;然后控制器启动移动架体滑移控制回路进行复位操作,控制器控制滑移导向驱动部件13动作使移动架体12向后滑移缩入,移动架体12后移远离罐笼4的过程中通过联动机构32带动摇台31沿摇台31的铰接中心向后翻转,移动架体12后移至初始位置后,摇台31呈翘起状,完成摇台让位动作。
[0034]
罐笼顶靠夹持定位臂14的定位斜面结构贴靠在罐笼4的倒角立面上呈夹持状时,矿车上下罐笼4所产生的变化载荷会使罐笼4产生上下窜动,从而会磨损罐笼顶靠夹持定位臂14的定位斜面结构或罐笼4的倒角立面,为了减小磨损,作为本实用新型的进一步改进方案,如图3所示,罐笼顶靠夹持定位臂14的定位斜面结构上设有滚动轴线水平设置的导向辊轮141。
[0035]
为了实现罐笼顶靠夹持定位臂14对罐笼4更稳固的夹持效果,作为本实用新型的进一步改进方案,导向辊轮141沿罐笼顶靠夹持定位臂14的定位斜面结构的上下方向设置为多个。
[0036]
为了实现准确控制移动架体12在前后方向上的滑移距离、以实现对罐笼4的稳固夹持,作为本实用新型的进一步改进方案,滑移导向机构上至少设有可限定移动架体12前移距离的前移限位部件。
[0037]
为了实现准确控制移动架体12在前后方向上的滑移距离、以实现对罐笼4的稳固夹持,作为本实用新型的进一步改进方案,移动架体12上对应罐笼4的位置设有距离传感器,距离传感器与集中电控部分的控制器电连接。距离传感器可以直接设置在移动架体12的前端面上、也可以设置在罐笼顶靠夹持定位臂14的定位斜面结构上,移动架体12前移的过程中,控制器可以通过距离传感器的反馈准确控制移动架体12的前移距离。
[0038]
为了实现更稳固的托罐效果,作为本实用新型的进一步改进方案,如图3所示,托罐部分2相对于移动架体12左右对称设置为多套。
[0039]
为了减少机构设置、并实现同步作业,作为本实用新型的进一步改进方案,如图3所示,多套托罐部分2共用同一个转臂旋转驱动部件25。
[0040]
为了便于根据蹲罐极限调整压簧232的限定弹力,作为本实用新型的进一步改进方案,如图5所示,缓冲杆233是螺杆结构、且螺杆结构上设于与其螺纹配合的调力螺母235,压簧板231滑动配合套接在缓冲杆233上,通过调整调力螺母235实现调整压簧板231的位置,进而实现调整压簧232的限定弹力。
[0041]
本立井提升钢丝绳罐道的稳罐补偿承接摇台可以通过控制滑移导向驱动部件13实现移动架体12大移动量地靠近或远离罐笼4,进而可以在满足罐笼最突出部分和井壁、井梁之间的最小间隙为350mm要求的前提下,可以大大降低翻转托罐爪24的结构尺寸,实现稳罐补偿承接摇台整体结构的扁平化、便于安装;可以实现对罐笼4五个方向自由度限定的稳罐操作、保证罐笼4进出矿车的平稳性;罐笼4传递来的变化载荷动能一方面可以通过限力补偿机构23进行吸收、另一方面可以通过滑移导向驱动部件13进行吸收,进而不仅可以获得较大的缓冲行程、而且可以实现多级缓冲,从而可以实现更好的稳罐效果,特别适用于中深部矿井的钢丝绳罐道。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1