输送机系统的制作方法
1.本发明涉及一种输送机系统,该输送机系统包括沿轨道移动以将包裹递送到沿轨道的指定区域的多个推运部(cart)。
背景技术:
2.直线感应电机(linear induction motor)通常用于输送机系统中以沿轨道推进推运部,但一直存在使用这些电机的效率的问题。一种已知的设计利用附接到推运部的永磁体和附接到轨道的定子绕组之间的小间隙。当间隙的大小增加时,效率降低。然而,当间隙太小时,可能会出现其他问题,例如移动部件之间的机械接触。此外,使用永磁体时,在这些电机中存在垂直于预期推力的不希望的吸引力,必须克服该吸引力。当连续的推运部经过电机时,这些电机的控制很复杂,如果在操作期间电机出现断电,则可能出现问题。
技术实现要素:
3.本发明是一种包括多个推运部、每个推运部沿着轨道移动的输送机系统,例如交叉带式输送机系统。多个直线感应电机沿轨道定位以推进推运部中的每一个。
4.根据本发明制造的一种示例性输送机系统包括轨道和沿轨道移动的多个推运部。示例性推运部包括基座和与轨道接合的轮子。推运部还包括鳍板部(flipper),鳍板部从基座向下延伸并且与沿轨道定位的多个直线感应电机(lim)相互作用。
5.一种示例性lim包括十八个线圈以及间隔部,十八个线圈包含在外壳内,间隔部围绕线圈延伸并延伸穿过线圈。十八个线圈位于两个分开的九个线圈行中,它们共同作为直线定子操作。换言之,lim包括:九个线圈的第一直线定子,沿lim的纵向轴线延伸;以及九个线圈的第二直线定子,沿lim的纵向轴线平行于第一直线定子延伸并定位成远离第一直线定子一段距离,如下面进一步讨论的。
6.每个直线定子是三相叠片定子(three-phase laminated stator)。更具体地说,直线定子以9-6极槽配合(9-6slot-pole combination)进行排列,其具有低谐波含量。在一个示例性实施例中,两个直线定子的每一相以并联方式进行电连接。也就是说,第一直线定子的u相与第二直线定子的u相并联连接,第一直线定子的v相与第二直线定子的v相并联连接,并且第一直线定子的w相与第二直线定子的w相并联连接。因此,第一直线定子和第二直线定子的操作是同步的。
7.示例性鳍板部由单个铝板形成。鳍板部限定了多个槽,这些槽延伸穿过鳍板部的整个厚度。在一个示例性实施例中,具有二十四(24)个槽。槽有利地允许借助于直线编码器容易地检测鳍板部沿轨道移动并通过lim时的鳍板部的位置。
8.外壳还限定了沿lim长度的通道,并且推运部的鳍板部被配置为移动通过通道并在lim的两个直线定子之间移动。更具体地,lim和鳍板部被设计成使得:当鳍板部穿过lim时,lim和鳍板部之间没有物理接触。这不仅限制了装置上的磨损,还限制了摩擦损失。
9.此外,对于这样的双定子配置,其中鳍板部在两个直线定子之间通过,不在鳍板部
上产生朝向任意一个直线定子的横向吸引力。相反,仅沿lim的纵向轴线即在推运部沿轨道的行进方向上推进鳍板部。在没有横向吸引力作用于鳍板部的情况下,鳍板部与两个直线定子之间的间距也可以显著减小。
10.本发明的lim的设计有利地不需要在推运部的鳍板部上安装任何永磁体。因此,不需要传感器来检测永磁体的磁场位置。同样,不需要在这样的永磁体接近或离开lim时调整施加到lim的电流。此外,在没有永磁体的情况下,铝制鳍板部上的推力是具有非常小的振荡的平滑的波形。此外,如果lim意外断电,则lim将保持惰性,而不会对输送机系统的其余部分产生任何影响。
附图说明
11.图1是根据本发明制造的示例性输送机系统的立体视图;
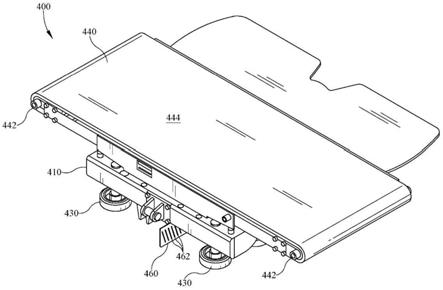
12.图2是单独示出的图1的输送机系统的推运部的立体视图;
13.图3是图2的推运部的侧视图;
14.图4是图1的输送机系统的轨道上的推运部的横截面视图;
15.图5是直线感应电机的局部分解立体视图,其中外壳的顶部被抬高并且其中一个线圈被移除;
16.图6是图5的直线感应电机的俯视图,其中移除了外壳的顶部并示意性地示出了热传感器的位置;以及
17.图7是示出直线感应电机中的直线定子的布线的示意性视图。
具体实施例
18.本发明是一种输送机系统,其包括多个推运部,其中每个推运部沿轨道移动。多个直线感应电机沿轨道定位以推进每个推运部。
19.首先参照图1,根据本发明制造的示例性输送机系统100包括轨道110,其包括多种转弯和高度变化。输送机系统100还包括沿轨道110移动的多个推运部400,以及将包裹提供到推运部400上的一条或多条馈送部带120。然后,推运部400将这些包裹存放到一个或多个分拣箱130中。
20.现在参照图2-图4,并且关于本发明的推运部400,示例性推运部400包括基座410,带式输送机440连接到基座410的顶部。带式输送机包括辊子442和带444,它们在与基座410沿轨道110的行进方向垂直的方向上运行。因此,当推运部400沿轨道110移动时,输送机440可以容易地从推运部400任一侧的馈送部带120接收包裹并且将包裹放入推运部400任一侧的分拣箱130中。
21.推运部400还包括接合轨道110的竖直轮420和水平轮430。特别地,如图4所示,轨道110包括第一(或内)导轨112和第二(或外)导轨114,它们彼此平行并连接到支撑框架140。第一组轮子420、430与第一导轨112接合,并且第二组轮子420、430类似地与第二导轨114接合。推运部400还包括鳍板部460,鳍板部460从基座410向下延伸,并与沿轨道110定位且在两个导轨112、114之间连接到支撑框架140的直线感应电机(lim)600相互作用。
22.现在参照图4-图6,示例性lim 600包括十八个线圈620以及间隔部630,十八个线圈620包含在外壳610内,间隔部630围绕线圈620延伸并延伸穿过线圈620。在一些示例性实
施例中,lim 600的外壳610由铝构成,并且具有大约170毫米的高度和大约350毫米的宽度。如图5所示,示例性lim 600的外壳610包括可移除顶部612,其提供对线圈620和其他相关电子器件和布线的入口。
23.十八个线圈620位于两个分开的九个线圈行中,它们共同作为直线定子操作。换言之,lim 600包括:九个线圈620的第一直线定子622,沿lim 600的纵向轴线(即,轨道的纵向轴线)延伸;以及九个线圈620的第二直线定子624,沿lim 600的纵向轴线平行于第一直线定子622延伸并定位成远离第一直线定子622一段距离,如下面进一步讨论的。
24.直线定子622、624中的每一个是三相叠片定子。更具体地,现在参照图7,直线定子622、624布置成9-6极槽配合,其具有低谐波含量。在一个示例性实施例中,两个直线定子622、624的每一相以并联的方式进行电连接。也就是说,第一直线定子622的u相与第二直线定子624的u相并联连接,第一直线定子622的v相与第二直线定子624的v相并联连接,并且第一直线定子622的w相与第二直线定子624的w相并联连接。因此,第一直线定子622和第二直线定子624的操作是同步的。
25.再次参照图2-图4,示例性鳍板部460由长约800mm和厚约5mm的单个铝板形成。鳍板部460限定多个槽462,其延伸穿过鳍板部460的整个厚度。在一个示例性实施例中,具有二十四(24)个槽462,每个槽宽约4mm。槽462有利地允许借助于直线编码器容易地检测鳍板部460沿轨道110移动时的鳍板部460的位置。
26.特别地,在本发明的一些实施例中,一个或多个直线编码器沿轨道定位,其包括当鳍板部460的槽462经过光学传感器的前方时能够被检测的多个光学传感器。在一个特定实施例中,直线编码器包括七个光学传感器,它们排列成行并与鳍板部460的槽462间隔相同的距离。由此,当槽462穿过光学传感器时,这七个光学传感器提供关于鳍板部460的位置的信息,以及因此提供关于推运部400的位置的信息,以帮助形成装载、居中和卸载操作。示例性直线编码器还包括与其他光学传感器不成行的第八光学传感器。该附加传感器用于识别推运部400的存在。
27.如前所述,第一直线定子622定位成与第二直线定子624相距一段距离。在一些实施例中,第一直线定子622定位成与第二直线定子624相距小于或等于约20mm。在一个示例性实施例中,在第一直线定子622的线圈620和第二直线定子624的线圈620之间存在约17mm的距离,并且在第一直线定子622的间隔部630和第二直线定子624的间隔部630之间存在约11mm的距离。
28.外壳610还沿lim 600的长度限定了通道614,并且如图4所示,推运部400的鳍板部460被配置为移动通过通道614并在lim 600的两个直线定子622、624之间移动。更具体地,lim 600和鳍板部460被设计成使得:当鳍板部460穿过lim 600时,lim 600和鳍板部460之间没有物理接触。这不仅限制了装置上的磨损,还限制了摩擦损失。
29.此外,对于鳍板部460在两个直线定子622、624之间通过的这种双定子配置,不会在鳍板部460上产生朝向直线定子622、624中任一个的横向吸引力。相反,仅沿lim 600的纵向轴线即在推运部400沿轨道110的行进方向上,推进鳍板部460。相比之下,典型的直线同步电机在定子和移动的永磁体之间产生沿垂直方向的吸引力,这增加对推运部的阻力,必须通过向定子提供的额外功率来克服该阻力。因此,与典型的直线同步电机相比,本发明提高了效率。
30.在没有横向吸引力作用在鳍板部460上的情况下,与典型的直线同步电机相比,鳍板部460和两个直线定子622、624之间的间距也可以显著减小。在典型的直线同步电机中,必须增大间距以避免移动元件和定子之间的物理接触,这就需要增加提供给定子的功率,以保持足够的推力。因此,本发明的lim 600与典型的直线同步电机相比表现出更高的效率。
31.表a提供了本发明的一种示例性直线感应电机的技术要求。
32.参数符号值度量单位推力fn160n额定电压un400vrms额定电流in10armsip程度ip54-额定频率fn50hz极对pp3-绝缘等级 f-最大过载电流ipk1,7*inarms占空比scs1-额定功率pn384w额定机械速度vn2.4m/s
33.表a
34.表b提供了本发明的一种示例性直线感应电机的绕组特性。
[0035][0036][0037]
表b
[0038]
本发明的lim 600的设计有利地不需要在推运部400的鳍板部460上安装任何永磁体。因此,不需要传感器来检测永磁体的磁场的位置。同样,不需要在这样的永磁体接近或离开lim 600时调整施加到lim600的电流。此外,在没有永磁体的情况下,铝制鳍板部460上的推力是具有非常小的振荡的平滑波形。此外,如果lim 600意外断电,则lim600将保持惰性,而不会对输送机系统100的其余部分产生任何影响。
[0039]
此外,由于不需要额外的槽来闭合直线定子622、624的绕组,因此lim 600的整体尺寸和重量减小。
[0040]
总体而言,本发明的lim 600显著降低了直线定子622、624的总电阻,这减少了lim 600的功率损耗。
[0041]
现在特别参照图6,示例性lim 600还包括放置在外壳610内并与线圈620相邻的热传感器640。热传感器640用于确保lem 600在操作期间不过热。预期用于本发明的lem 600的一种示例性热传感器是从半导体公司(埃因霍温,荷兰)可获得的kty84/130硅温度传感器。多个(两个)热传感器640定位成邻近第一直线定子622并且并联连接。同样,多个(两个)热传感器640定位成邻近第二直线定子624并且并联连接。然后这两组传感器640串联连接。优选地,所得到的传感器的等效电阻为300ω。
[0042]
本领域普通技术人员还将认识到的是,在不背离本发明的教导的情况下,另外的实施例也是可能的。给出该详细描述,尤其是其中公开的示例性实施例的具体细节,主要是为了理解清楚,不应从中理解出不必要的限制,对于本领域技术人员来说,在阅读本公开后,修改将变得明显,并且可以在不脱离本发明的精神或范围的情况下进行修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1