轨道定位系统的制作方法
1.本发明涉及电梯所使用的轨道的轨道定位系统。
背景技术:
2.在以日本、北美、欧洲为首的发达国家中,伴随少子高龄化的施工作业者的减少成为社会问题,在电梯的安装现场也要求施工作业的省力化与作业性提高。在电梯的安装作业中,轨道安装由于为各楼层的重复作业,因此是需要时间与劳力的作业之一。电梯的轨道位于轿厢的两侧,轿厢沿该轨道升降。一般来说,轨道单体的长度是3~5m,在升降路径内连接多个轨道而竖直设置,以被连结的轨道为铅垂的方式用托架固定于升降路径的墙壁、钢筋等上。轨道安装作业由于会左右升降时轿厢的乘坐舒适度,因此会对作业者要求高精度地定位轨道的高技能。
3.在轨道安装时,需要考虑因日照而改变建筑物倾斜度的情况。因此,配合建筑物的倾斜,轨道安装时所参照的基准芯也同样地倾斜,通过沿其定位轨道并固定于升降路径内的壁面上,能够合理且准确地安装轨道。一直以来,将升降路径中从最上部向最下部铺设的硬钢丝作为基准芯而使用,由于配合建筑物的倾斜而硬钢丝也同样地倾斜,因此与因日照引起的建筑物的倾斜对应。
4.可是,硬钢丝因风、建筑物的振动而总是振动,轨道与硬钢丝间的距离的测量方法会因作业者而容易产生偏差,还由于设备材料的搬入、升降路径内的作业时容易与硬钢丝干涉,因此存在作业性差的问题。
5.因此,作为不使用硬钢丝的轨道定位装置的现有技术文献,有专利文献1中记载的塔内升降机安装装置。该专利文献1中记载的塔内升降机安装装置中,有将从设置于升降路径下部的激光铅垂器照射的激光光束作为安装基准芯而安装轨道的装置的记载,将提供一种不会损害作业者的安全性且能缩短电梯的安装时间的装置作为课题。为了解决该课题,在专利文献1中记载了以下结构,在具备在升降路径内制作基准垂直线的垂直基准装置、配置检测上述垂直基准线的检测装置的作业台架、设置于该作业台架上并使该作业台架与上述垂直基准线一致而水平地保持的姿势保持装置、设置于上述作业台架上并相对于上述垂直基准线进行导轨定心的导轨定心装置、设置于上述作业台架上并沿上述导轨动作的升降装置的塔内升降机安装装置中,具备在产生上述垂直基准线的基准线发生器中设置专用电源的同时检测安装电梯的建筑物的弯曲量并计算将距离建筑物壁面的距离保持为恒定值的修正值的修正机构、通过该修正机构控制导轨的安装位置的控制机构。
6.现有技术文献
7.专利文献1:日本特开昭59
‑
158780号公报
8.在专利文献1中记载的检测塔内升降机安装装置的建筑物的倾斜的方法中,将在建筑物的倾斜之后从激光铅垂器照射的激光光束在作业台架的检测装置中可经常检测作为前提。可是,实际上随着作业台架与激光铅垂器的距离的远离,由于稍稍的建筑物的倾斜、作业台架的摇动就会发生激光光束通过检测装置以外的情况,会存在不能检测激光光
束位置的课题。
技术实现要素:
9.本发明的目的在于提供一种即使是建筑物产生倾斜的情况也能够考虑建筑物的倾斜地进行轨道的定位的轨道定位系统。
10.为了实现上述目的,本发明特征为:在升降路径内对轨道进行定位的轨道定位系统中,具备倾斜检测装置、轨道定位装置,上述倾斜检测装置具备设置于上述升降路径的下部且向上方照射激光光束的激光照射部、改变上述激光照射部的姿势的姿势改变部、控制上述姿势改变部的动作的姿势控制部、设置于上述升降路径的上部且接收上述激光光束的受光部a,上述轨道定位装置具备把持上述轨道的轨道把持部、使由上述轨道把持部把持的上述轨道向轨道固定位置移动的轨道位置调整部、控制上述轨道位置调整部的定位控制部、接收上述激光光束的受光部b,上述姿势控制部以能够在上述受光部a中接收上述激光光束的方式控制上述姿势改变部的动作,上述定位控制部以上述受光部b接收向上述激光照射部与上述受光部a之间照射的上述激光光束的方式使上述轨道位置调整部移动。
11.本发明的效果如下。
12.根据本发明,能够提供一种即使是建筑物产生倾斜的情况也能够考虑建筑物的倾斜地进行轨道定位的轨道定位系统。
附图说明
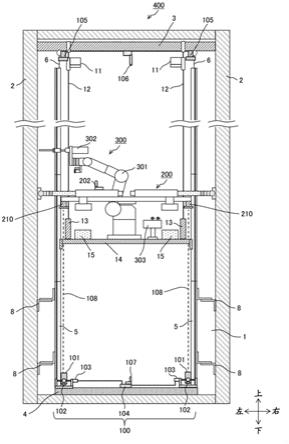
13.图1是具备实施例1的轨道定位装置200的轨道安装系统400的概略图。
14.图2是从图1中仅取出轨道定位装置200的图。
15.图3是从上方观察图2的概略图。
16.图4是实施例1的倾斜检测装置100的正面放大图。
17.图5是图4的俯视图。
18.图6是实施例1的受光部a的正面放大图。
19.图7是实施例1的轨道定位系统250的概略构成图。
20.图8是实施例1的轨道定位系统250的系统构成图。
21.图9是表示实施例1的铅垂地照射激光光束时的倾斜检测装置100的姿势控制循环的图。
22.图10是表示实施例1的追踪伴随升降路径的倾斜的受光部a105的移动时的激光照射部101的姿势控制循环的图。
23.图11是实施例1的轨道定位装置200的姿势控制循环的图。
24.图12是表示使用实施例1的轨道定位系统的轨道安装方法的流程的流程图。
25.图13是实施例2的倾斜检测装置100的正面放大图。
26.图中:1—升降路径,2—壁面,3—吊臂,4—底盘,5—轨道,6—金属丝,8—托架,9—原本的升降路径的位置,10—日照,11—卷绕机,12—卷绕机绳索,13—吊索,14—工作台,15—台座,100—倾斜检测装置,101—激光照射部,102—姿势检测部,103、103a、103b—姿势改变部,104—姿势控制部,105—受光部a,106—无线通信机a,107—无线通信机c,108—激光光束,109—光束压缩机,110—物镜,111—像侧透镜,112—机箱,113—光位置传
感器,114—光学滤镜,115—万向架,116—光路改变部,117—光路控制部,118—支撑座,120a、120b—旋转轴,200—轨道定位装置,202—无线通信机b,203—轨道规,204—轨道把持部,205—前后位置调整部,206—左右位置调整部,207—底座,207a—长孔,208—壁面接触部,209—定位控制部,210—受光部b,211—力敏感器,212—旋转轴,213—受光部安装板,214—支点a,215—支点b,250—轨道定位系统,300—轨道固定装置,301—机械臂,302—终端操作装置,303—工具座,400—轨道安装系统。
具体实施方式
27.以下,基于图示的实施例说明本发明的轨道定位装置及其轨道定位方法。并且,在各图中,在同一结构中标注相同的符号、说明重复的情况会存在省略其说明的情况。在本发明的各实施例中,将图中记载的方向定义为前后、上下、左右。
28.本发明的各种构成元件未必是各自独立的存在,允许一种构成元件由多个部件构成、多个构成元件由一个部件构成、某个构成元件是不同的构成元件的一部分、某个构成元件的一部分与其他构成元件的一部分重复的情况等。
29.实施例1
30.﹝轨道安装系统400的整体结构﹞
31.首先,参照图1关于轨道安装系统400的整体结构进行说明。图1是具备实施例1的轨道定位装置200的轨道安装系统400的概略图。在此,实施例1中假定下述情况。是在升降路径1内已经确定电梯的安装位置的情况、从最下部至最上部的轨道5搬入以及连结于升降路径1内,在未用托架8固定于壁面2的状态下存在,用金属丝6等从升降路径1上部吊下的情况。另外,在实施例1中,为轨道最下部设置于底盘4的结构。轨道安装系统400主要由轨道固定装置300、轨道定位装置200的两个装置构成。
32.﹝轨道固定装置300的结构﹞
33.轨道固定装置300的作用为将轨道定位装置200搬送至预定高度并在壁面2的预定位置上安装轨道5、对那时需要的壁面的钻孔、锚打击设置、安装托架等。因此,轨道固定位置300具备根据各作业与机械臂301换装的终端操作装置302、保管安装于终端操作装置302的工具的工具座303、设置机械臂301的工作台14、安装于吊臂3并使工作台14升降的卷绕机11、连接卷绕机11的卷绕机绳索12的吊索13、无线通信机b202。
34.﹝轨道定位装置200的结构﹞
35.其次,关于轨道定位装置200的详细结构,使用图1~图3进行说明。
36.图2是从图1中只取出轨道定位装置200的图,图3是从上方观察图2的概略图。
37.轨道定位装置200由于其自身没有升降功能,因此装载于设置于工作台14的台座15上进行升降。在使轨道定位装置200升降时,在工作台14的台座15上载置轨道定位装置200,使卷绕机11动作。卷绕机11上卷、或下卷卷绕机绳索12,轨道定位装置200在移动至预定位置时停止。并且,若轨道定位装置200完成对壁面2的支撑,则卷绕机11动作,工作台14以到达轨道定位装置200下方的方式移动。
38.轨道定位装置200是用于使轨道5移动至预定位置并进行保持的装置。轨道固定装置300将被轨道定位装置200保持的轨道5固定于壁面2。因此,轨道定位装置200在轨道固定装置300将轨道5固定于壁面2之前保持轨道5。
39.轨道定位装置200由无线通信机b202、轨道规203、轨道把持部204、前后位置调整部205、左右位置调整部206、底座207、壁面接触部208(接触部)、定位控制部209、检测轨道位置的受光部b210、检测支撑力的力敏感器211(支撑力检测部)构成。前后位置调整部205与左右位置调整部206具有作为将用轨道把持部204把持的轨道5移动至轨道固定位置的轨道位置调整部的功能。定位控制部209控制该轨道位置调整部。
40.无线通信机b202与后述的倾斜检测装置100的无线通信机c107进行无线通信。
41.轨道规203为了配合对置的两条轨道5之间的距离而使用。
42.轨道把持部204配置于轨道规203的左右,把持对置的两条轨道5。
43.底座207通过支点a214可转动地支撑轨道规203的左右方向中央部。
44.左右位置调整部206配置于底座207,与壁面2接触,可在左右方向上伸缩。
45.壁面接触部208连接于左右位置调整部206的左右,通过左右位置调整部206产生的支撑力而与壁面接触并被推压。在壁面接触部208与左右位置调整部206之间配置旋转轴212,在壁面2上,根据倾斜,壁面接触部208进行追踪。
46.前后位置调整部205分别配置于底座207的左右,通过轨道规203左右的各个与支点b215可转动地连接且可在前后方向上伸缩。
47.在底座207上形成配合前后位置调整部205的伸缩动作而容许支点a214在前后方向上动作的长孔207a。实施例1中的前后位置调整部205、左右位置调整部206将电动、液压、气压等作为驱动力,成为通过伸缩的活塞部产生力的线性驱动器。
48.力敏感器211配置于左右位置调整部206与壁面接触部208之间,检测支撑力(来自壁面的反作用力)。
49.在检测轨道的位置时,使用激光光束108。如图1所示,在升降路径1的下部设置两个激光照射部101,将从激光照射部101向铅垂方向照射的两条激光光束108作为基准芯而使用。激光光束108利用通过受光部安装板213安装于轨道规203的四象限光电传感器等的受光部b210(位置检测部)进行检测。受光部b210检测轨道规203的位置。
50.并且,定位控制部209以受光部b210接收照射于激光照射部101与受光部a105之间的的激光光束108的方式控制轨道位置调整部(前后位置调整部205、左右位置调整部206)。
51.﹝倾斜检测装置100的结构﹞
52.关于倾斜检测装置100的结构,使用图1、图4以及图5说明。图4是实施例1的倾斜检测装置100的正面放大图,图5是图4的俯视图。
53.在底盘4上配置倾斜检测装置100。倾斜检测装置100具备向上方照射在设置轨道5时成为基准的激光光束的两个激光照射部101、检测激光照射部101的姿势的姿势检测部102、改变激光照射部101的姿势的姿势改变部103(103a、103b)、在无线通信机a106以及无线通信机b202之间进行无线通信的无线通信c107、基于无线通信机c107以及姿势检测部102的信息控制姿势改变部103的动作的姿势控制部104、设置于升降路径1的上部并接受来自激光照射部101的激光光束108的受光部a105。关于受光部a105的结构后述。
54.激光照射部101通过旋转轴120a被万向架115支撑,激光照射部101可在左右方向上转动。另外,万向架115通过旋转轴120b被支撑座118支撑,万向架115可在前后方向上转动。旋转轴120a的一端与姿势改变部103a连接,姿势改变部103a调整激光照射部101的左右方向的角度。旋转轴120b的一端与姿势改变部103b连接,姿势改变部103b调整万向架115的
前后方向的角度。通过在万向架115的前后方向上调整角度而调整激光照射部101的前后方向的角度。
55.﹝受光部a105的结构﹞
56.其次,关于受光部a105的结构使用图6进行说明。图6是实施例1的受光部a的正面放大图。
57.受光部a105配置于吊臂3。受光部a105具备安装于吊臂3的筒状的机箱112、配置于机箱112的下方侧开口部的物镜110、配置于机箱112内并位于物镜110的上方且聚集来自物镜110的激光光束108的像侧透镜111、配置于机箱112内并位于像侧透镜111的上方且接收所聚集的像侧透镜111的激光光束108的光位置传感器113、配置于物镜110的下方侧且抑制除激光光束108以外的干扰光线透过的光学滤镜114(光线干扰抑制机构)。物镜110与像侧透镜111构成再次使在远方扩大的激光光束108收敛的光束压缩机109(激光光束收敛机构)。实施例1中,通过具备光束压缩机109而能够提高激光光束108的检测精度。
58.在受光部a105中,接收激光光束108,向无线通信机a106(图1)发送激光位置的坐标数据。
59.﹝轨道定位系统250的动作﹞
60.其次,使用图7~图12关于轨道定位系统250的动作进行说明。图7是实施例1的轨道定位系统250的概略结构图。图8是实施例1的轨道定位系统250的系统构成图。图9是表示铅垂地照射实施例1的激光光束时的倾斜检测装置100的姿势控制循环的图。图10是表示追踪伴随实施例1的升降路径的倾斜的受光部a105移动时的激光照射部101的姿势控制循环的图。图11是表示实施例1的轨道定位装置200的姿势控制循环的图。图12是表示使用实施例1的轨道定位系统的轨道安装方法的流程的流程图。
61.在实施例1中,通过受光部a105、无线通信机a106、倾斜检测装置100、轨道定位装置200构成轨道定位系统250。
62.一直以来,在升降路径内安装轨道的情况下,利用从升降路径上部的吊臂向下方挂硬钢丝、在底盘上固定硬钢丝的下端并将固定的硬钢丝作为基准芯的方法。在将硬钢丝作为基准芯的情况下,由于硬钢丝因风、建筑物的振动而经常振动,因作业者在轨道的安装位置上容易产生偏差,另外,搬入的机械材料等与硬钢丝干涉而作业性恶化。为了解决该问题,利用安装将激光光束作为基准芯而利用的轨道的方法。
63.如图7所示,建筑物会有受到日照10而倾斜的情况。在图7中,建筑物以升降路径1的上方从原本的升降路径的位置9位于右侧的方式倾斜。在将硬钢丝作为基准芯的轨道安装方法中,由于配合建筑物的倾斜而追踪硬钢丝,因此能够原样地使用该基准芯,但在将激光光束作为基准芯的轨道安装方法中,由于激光光束不会配合建筑物的倾斜进行追踪,因此是不能原样地利用激光光束的基准芯的结构。关于用于解决该问题的方法,更换图12的流程图,以下进行说明。
64.在倾斜检测装置100中,从激光照射部101向铅垂方向(上方)照射激光光束108(步骤s1:向铅垂方向照射激光光束108的工序)。在姿势控制部104中,基于检测激光照射部101的姿势角度的姿势检测部102的检测值,控制姿势改变部103以激光光束108铅垂地发光的方式使激光照射部101动作。激光照射部101的动作由姿势检测部102检测,向姿势控制部104反馈(图9)。如此,以激光光束108铅垂地发光的方式使激光照射部101动作。
65.其次,以受光部a105接收激光光束108的方式调整受光部a105的位置(步骤s2:调整受光部a的位置的工序)。受光部a105的光位置传感器113获得激光位置坐标数据,从无线通信机a106向倾斜检测装置100的无线通信机c107传送激光位置坐标数据。以此数据确定基准芯。
66.在无线通信机c107中接收的激光位置坐标数据向姿势控制部104发送,姿势控制部104以激光光束108被受光部a105接收的方式控制姿势改变部103。即,姿势控制部104以激光照射部101追踪受光部a105的坐标位置的方式控制姿势改变部103(步骤s3:使追踪激光光束108的模式为断开的工序)。如图7所示,若建筑物倾斜则改变受光部a105的激光位置坐标数据。受光部a105的光位置传感器113获得已改变的激光位置坐标数据,从无线通信机a106向倾斜检测装置100的无线通信机c107发送激光位置坐标数据。已改变的激光位置坐标数据向姿势控制部104反馈(图10),姿势控制部104以激光照射部101追踪受光部a105的方式控制姿势改变部103。
67.在实施例1中,由于姿势控制部104以激光照射部101追踪受光部a105的方式控制姿势改变部103,因此,即使是建筑物倾斜而改变受光部a的位置的情况下,也能够配合建筑物的倾斜而改变(追踪)基准芯、抑制轨道安装位置的偏差。
68.其次,关于轨道定位装置200的动作进行说明。如上述,轨道定位装置200由于其自身没有升降功能,因此载置于设置于工作台14的台座15进行升降。在使轨道定位装置200升降时,在工作台14的台座15上载置轨道定位装置200,使卷绕机11动作(步骤s4:使工作台14升降移动的工序)。卷绕机11上卷、或下卷卷绕机绳索12,在轨道定位装置200移动至预定位置时停止。并且,开始轨道5的定位(步骤s5:开始轨道5的定位的步骤)。
69.定位控制部209具备未图示的计算部、存储控制程序等的存储部、存储于存储部的控制程序、基于受光部b210的检测值、力敏感器211的检测值进行计算的计算部。
70.左右位置调整部206使进行伸缩的活塞部伸出,将壁面接触部208推压至壁面2,在壁面2上支撑轨道定位装置200进行固定(步骤s6:在壁面上支撑轨道定位装置200的工序)。若轨道定位装置200完成向壁面2的支撑,则卷绕机11动作,以工作台14成为轨道定位装置200的下方的位置的方式移动。定位控制部209以基于力敏感器211的检测值相对于轨道定位装置200的壁面2成为预定值以上的支撑力的方式进行控制。
71.定位控制部209基于受光部b210的检测值以及力敏感器211的检测值控制前后位置调整部205以及左右位置调整部206并使轨道规203向轨道5的设置位置移动。
72.轨道5以把持轿厢(未图示)的方式成对地设置于升降路径1内。两条轨道5由轨道定位装置200的轨道把持部204把持(步骤s7:把持轨道5的工序)。轨道把持部204具备用于把持轨道5的夹紧机构,安装于轨道规203的两端。由于该轨道规203的刚体部的长度与预定的轨道间距离相同、或轨道把持面平行,因此,若由轨道把持部204把持轨道5,则成为出现与成对的两条轨道间距离平行的结构。
73.从激光照射部101向受光部a105照射成为基准芯的激光光束108。受光部a105的激光位置坐标数据通过无线通信机c107从无线通信机a106向无线通信机b202发送。受光部a105的激光位置坐标数据由无线通信机b202接收,从无线通信机b202向定位控制部209发送。
74.定位控制部209从受光部a105的激光位置坐标数据检测受光部b210接收激光光束
108的位置,使轨道规203动作(步骤s8:受光部b210检测激光位置的工序)。
75.被固定于轨道规203的轨道5通过前后位置调整部205以及左右位置调整部206并列地移动(步骤s9:进行轨道定位动作的工序)。在轨道规203上通过支点b213连接可在前后方向上伸缩的前后位置调整部205,前后位置调整部205安装于底座207。而且,在底座207上安装可在左右方向上伸缩的左右位置调整部206,通过利用在将左右位置调整部206的左右前端部的壁面接触部208推压至对置的壁面上时产生的反作用力,使轨道5向前后左右移动而移动至预定位置。在左右位置调整部206与壁面接触部之间配置力敏感器211,力敏感器211为了检测对壁面的支撑力(反作用力)而控制左右位置调整部206的移动而使用。为了防止轨道定位装置200的掉落,需要以由左右位置调整部206产生的支撑力为预定值以上的方式用定位控制部209进行控制。支撑力由于需要考虑轨道定位装置200的自重、轨道5的刚性,因此在定位控制部209中考虑这些而计算支撑力的预定值。如上述,实施例1中从最下部至最上部的多个轨道5搬入及连结于升降路径1内,在未用托架8固定于壁面2上的状态下而存在。在用轨道把持部204把持的轨道5中,会在未用托架8固定以外的多个轨道5中产生推压力、拉力。实施例1中的轨道5的刚性是指推压力、拉力。左右位置调整部206能保持为支撑力为预定值以上、且在左右方向上移动而确定固定轨道5的左右位置(步骤s10:结束轨道定位的工序)。
76.其次,通过分别调整两个前后位置调整部205的移动量,也能够矫正轨道5的扭曲。并且,两个前后位置调整部205与轨道规203通过支点b113可旋转地连接,轨道规203由于通过底座207与支点a214可旋转地连接,因此能降低施加于前后位置调整部205的负担。
77.若轨道定位结束,则使轨道固定装置300动作,对升降路径1的壁面2钻孔,打入锚螺栓(步骤s11:开始由轨道固定装置300进行的轨道固定作业的工序)。并且,在打入壁面2中的锚螺栓上安装托架8,在该托架8上固定轨道5,结束轨道固定作业(步骤s12:结束轨道固定作业的工序)。
78.若轨道固定作业结束,则使卷绕机11动作而卷起卷绕机绳索12,在工作台14的台座15上载置轨道定位装置200。若轨道定位装置200的载置结束,则使左右位置调整部206向缩小的方向动作,释放支撑力,使左右位置调整部206最短化(步骤s13:使左右位置调整部206最短化的工序)。若左右位置调整部206的最短化结束,则使轨道把持部204动作,释放轨道5的把持(步骤s14:释放轨道把持部204的工序)。若释放轨道5的把持,则轨道定位装置200的全负载向轨道固定装置300移动。在释放了轨道5的把持之后,使前后位置调整部205向缩小的方向动作,使前后位置调整部205最短化(步骤s15:使前后位置调整部205最短化的工序)。并且,结束轨道安装工序。
79.根据实施例1,能够提供一种根据伴随轨道定位动作的支撑力变动、壁面的状态而高精度地判断轨道设置位置、能够使轨道定位作业实现自动化的轨道定位装置。
80.另外,根据实施例1,由于姿势控制部104以激光照射部101追踪受光部a105的方式控制姿势改变部103,因此,即使是建筑物倾斜而改变受光部a的位置的情况下,也能够配合建筑物的倾斜而改变基准芯、能够抑制轨道安装位置产生偏差。
81.实施例2
82.其次,关于本发明的实施例2,使用图13进行说明。图13是实施例2的倾斜检测装置100的正面放大图。与实施例1相同的结构标注相同的符号,省略其详细的说明。
83.在实施例2中,与实施例1不同之处在于具备改变激光光束108的照射方向的光路改变部116。
84.在实施例2中,倾斜检测装置100具备激光照射部101、改变从激光照射部101照射的激光光束108的照射方向的光路改变部116、改变光路改变部116的姿势的姿势改变部103(103a、103b)、与无线通信机a106以及无线通信机b202进行无线通信的无线通信机c107、基于无线通信机c107的信息控制姿势改变部103的动作的光路控制部117、设置于升降路径的上部并接受在光路改变部116中改变的激光光路108的受光部a105。另外,未图示,但倾斜检测装置100具备检测光路改变部116的姿势的姿势检测部。激光照射部101以激光光束108的照射方向为左右方向(水平方向)的方式横向地配置。
85.光路改变部116被万向架115支撑,通过安装于万向架115的姿势改变部103a可在左右方向上转动。另外,万向架115被支撑座118支撑,万向架115通过姿势改变部103b可在前后方向上转动。
86.姿势改变部103a以使从激光照射部101向左右方向(水平方向)照射的激光光束108朝向垂直方向的方式改变角度。姿势改变部103b以使从激光照射部101向左右方向(水平方向)照射的激光光束108朝向前后方向的方式改变角度。并且,光路控制部117控制姿势改变部103a、103b,向受光部a105照射激光光束108。
87.并且,光路控制部117以受光部b210接收向光路改变部116与受光部a105之间照射的激光光束108的方式控制轨道位置调整部(前后位置调整部205、左右位置调整部206)。关于轨道定位装置200的动作与实施例1相同。
88.在实施例2中,除了实施例1中的作用效果,还能够得到以下的作用效果。根据实施例2,由于以使激光照射部101为横向的方式配置,能够缩小倾斜检测装置100的高度方向,能够扩大倾斜检测装置100的设置的自由度。
89.并且,本发明并未限于上述实施例,包括多种变形例。上述实施例是为了容易理解地说明本发明而详细地说明的内容,未必具备说明的全部结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1