一种码垛机器人系统的制作方法
1.本技术涉及冶金机器人技术领域,特别涉及一种码垛机器人系统。
背景技术:
2.本部分的陈述仅仅是提供了与本技术相关的背景技术,并不必然构成现有技术。
3.在粉末冶金行业中,坯块烧结后由烧结炉内金属丝网带输出,坯块的排列形式一般按其面积大小,水平成排摆放或品字型摆放,坯块下方要铺垫一块石墨板。下料处由人工抓取,将成品件和石墨板分别码放到对应的码盘上。
4.人工下料码盘的方式,存在多种弊端:需要工人不停的机械式搬运,工人劳动强度高。出口处粉尘飞扬,劳动环境恶劣。成品件掉落会造成员工受伤或工件损坏,存在一定的安全隐患。连续生产,需要多班工人轮岗,人工成本高。
5.发明人发现,目前存在解决方案一般有:带磁性吸盘或带内撑式抓具的机械衍架结构或机械手。这些方案能在一定程度上解决一些问题,但是同时存在缺陷:只能抓取固定类型的成品件。只能抓取固定数量的成品件。无法适应各种不同成品件排列方式。磁吸式只能抓取金属成品件,石墨板无法抓取。不带缓冲机构,发生磕碰时造成成品件或抓取工具损坏。对成品件的摆放形状和抓取定位的精度要求过高,造成抓取成功率低和系统运行的可靠度差。抓具本身重量大,需选取额定负载大的设备,成本高。
技术实现要素:
6.本技术的目的是针对现有技术存在的缺陷,提供一种码垛机器人系统;通过带有真空吸盘的机器人,形成抓取工业机器人结构,阵列布置的真空吸盘能够提高抓取的成功率,允许一定误差,在抓取工件后通过重定位装置进行整理位置,然后重新抓取码放,提高码放后的准确度。
7.为了实现上述目的,采用以下技术方案:
8.一种码垛机器人系统,包括工业机器人、抓具和重定位机构,抓具安装在工业机器人末端,重定位机构位于抓具的运动路径上,重定位机构包括倾斜板和布置在倾斜板上依次设置的多组定位机构,每组定位机构包括一对定位块,定位块形成沿倾斜板高到低方向上宽度逐渐减小的凹槽,用于对抓具抓取的工件进行重新定位。
9.进一步地,所述定位机构布置在倾斜板顶部倾斜面的低端,多组定位机构沿直线依次布置。
10.进一步地,相邻的定位机构之间贴合布置,处于边沿位置的定位机构的定位块顶部高于其他位置定位块的顶部,处于非边沿位置的定位机构的凹槽开口边沿与相邻的定位机构的凹槽开口边沿平齐。
11.进一步地,所述重定位机构还包括定位机架,倾斜板一端通过铰链连接定位机架,另一端铰接有伸缩杆,伸缩杆远离倾斜板的一端铰接在定位机架上,定位机架、伸缩杆和倾斜板形成形状可变的三角形结构。
12.进一步地,所述抓具包括吸盘、吸盘支架和缓冲机构,多个吸盘安装在吸盘支架上,吸盘支架通过缓冲机构连接工业机器人末端。
13.进一步地,所述吸盘阵列布置在吸盘支架上,吸盘连通有快换接头,快换接头分别通过管路连通负压源。
14.进一步地,所述吸盘连通负压源的管路上设有电磁阀,吸盘支架上安装有激光测距仪。
15.进一步地,所述缓冲机构包括伸缩滑杆和弹性件,伸缩滑杆在弹性件和吸盘支架的共同作用下伸缩,以改变吸盘支架与工业机器人末端的间距。
16.进一步地,所述伸缩滑杆连接工业机器人位置安装有压力传感器。
17.进一步地,还包括码盘,码盘围绕工业机器人布置。
18.与现有技术相比,本技术具有的优点和积极效果是:
19.(1)通过带有真空吸盘的机器人,形成抓取工业机器人结构,阵列布置的真空吸盘能够提高抓取的成功率,允许一定误差,在抓取工件后通过重定位装置进行整理位置,然后重新抓取码放,提高码放后的准确度。
20.(2)利用重定位机构,使成品件利用自身重力来进行重新规整排列,可以解决因前方工序工人摆放不整齐带来的码垛排列偏差。抓取成品件后,机器人将几个成品件放置于重排列装置上,排列位置矫正后再抓走去往码盘码垛,保证码垛整齐无误。
21.(3)在金属丝网带的运动路径末端设有回收机构,用于承接未被工业机器人抓取的金属板、石墨板,遗落在金属丝网带上的金属板和未抓取的石墨板会随着金属丝网带滑落入回收机构内,避免了金属板残留导致的碰撞问题。
附图说明
22.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
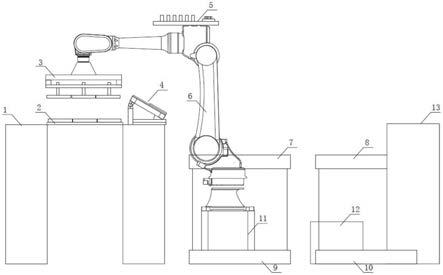
23.图1是本技术实施例1中码垛机器人系统的整体结构示意图。
24.图2是本技术实施例1中码垛机器人系统的俯视示意图。
25.图中,1、烧结机,2、金属丝网带,3、抓具,4、重定位装置,5、气路附件,6、机器人,7、第一码盘,8、第二码盘,9、第三码盘,10、第四码盘,11、机器人底座,12、控制箱,13、人机界面,14、石墨板,15、金属工件。
具体实施方式
26.应该指出,以下详细说明都是例示性的,旨在对本技术提供进一步地说明。除非另有指明,本文使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
27.为了方便叙述,本技术中如果出现“上”、“下”、“左”、“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本技术的限制。
28.正如背景技术中所介绍的,现有技术中磁吸式吸盘/内撑式抓具的机械手存在不
足,难以实现对石墨板的抓取,并且其摆放、抓取定位精度要求高,难以满足输送带上摆放不整齐的石墨板的抓取码垛需求,针对技术问题,本技术提出了一种码垛机器人系统。
29.实施例1
30.本技术的一种典型的实施方式中,如图所示,提出了一种码垛机器人系统。
31.主要包括机器人6、重定位装置和真空抓具;真空抓具安装在机器人手臂末端,由机器人的动作控制真空抓具移动,从而带动真空抓具抓取工件,并将工件输送到重定位装置上,然后将定位后的工件输送至码盘上进行码垛存放。
32.对于真空抓具的结构,包括真空吸盘、真空发生器、电磁阀、缓冲装置、快换接头、激光测距仪、压力传感器及气路附件5;
33.多个真空吸盘安装在吸盘支架上,吸盘支架通过缓冲装置连接机器人手臂末端,在吸盘支架受到垂直于缓冲装置方向的力时,缓冲装置能够回缩,从而实现缓冲作用,避免机器人手臂带动真空吸盘移动时碰撞工件造成的工件损伤问题。
34.可以理解的是,所述的缓冲装置可以采用伸缩滑杆配合弹簧的结构,弹簧套设在伸缩滑杆外部,伸缩滑杆的一端连接吸盘支架,另一端连接机器人手臂,在真空吸盘受到伸缩滑杆的轴向推力时,伸缩滑杆挤压弹簧并回缩,实现避让动作,从而减少了对工件的碰撞,不再受力时,吸盘支架在弹簧回弹作用下恢复原位置。
35.真空吸盘连接有快换接头,通过快换接头对接管路后,串联电磁阀接入真空发生器,真空发生器可以采用负压泵,通过电磁阀的开启关闭改变真空吸盘的工作状态,使得真空吸盘吸附工件或释放工件。
36.为了保证工作过程中对工件的抓取精度,在真空吸盘的吸盘支架上设有激光测距仪,时刻测取真空吸盘与目标工件的间距,对真空吸盘的运动进行监测,提高运动精度;另外,为了避免真空吸盘在与工件接触后的碰撞,并且保证其在码垛时的稳定放置,还设有压力传感器,对真空吸盘的受力进行测取,在工件放置在目标位置后,工件位置不再变化,此时真空吸盘的移动会改变压力传感器的数值,通过设置压力传感器的压力阈值上限,能够避免在稳定放置后吸盘的过度移动碰撞工件。
37.真空吸盘有多个,呈阵列布置,从而能够单次抓取多个成品件以及石墨,根据单次所需抓取的数目,可以对真空吸盘的安装数量进行调节;
38.另一方面,为了保证抓取的工件能够与重定位装置匹配,在本实施例中,将真空吸盘配置为呈矩形阵列分布,从而能够匹配多种型号的成品件和石墨板,能够适应多种成品工件的摆放方式,提高抓取成功率。
39.对于机器人,在本实施例中,选用六轴工业机器人,对于具体的型号,可以根据需求选择市面上成品的商业机器人,特点为稳定可靠性,无故障运行时间长,维护间隔时间长;速度快,操作灵活;精度高,具有极佳的轨迹精度和重复定位精度;功率大,负载大;坚固耐用,适合恶劣生产环境;通用性强,易集成。
40.六轴工业机器人是下料码垛的主力设备,带动吸盘抓取成品件后,去相应的码盘进行码垛。
41.可以理解的是,六轴工业机器人作为下料码垛的主要设备,也作为工业机器人带动吸盘抓取成品工件,带动工件去相应的码盘进行码垛。
42.在机器人带动真空抓具从输送带上抓取成品工件后,由于输送带上输出的成品工
件呈散乱状态,为了实现整齐的码垛,在将成品工件输送到码盘前,先通过重定位装置对成品工件进行重新定位;
43.具体的,重定位装置是利用成品件自身重力来进行重新规整排列的设备。可以解决因前方工序工人摆放不整齐带来的码垛排列偏差。抓取成品件后,机器人将几个成品件放置于重排列装置上,排列位置矫正后再抓走去往码盘码垛,保证码垛整齐无误。
44.重定位装置包括呈倾斜布置的定位板,定位板倾斜面的下端依次设有多组定位机构,每组定位机构包括相对设置的两个定位块形成上方开口大、下方开口小的变径通道,用于使得下落的成品工件能够沿变径通道下落过程中到达指定位置;
45.相邻的定位机构间距相等,下落定位后的成品工件在定位板上沿一条直线且等间距布置,完成成品工件的重新规整排列。
46.可以理解的是,在本实施例中,相邻定位机构紧贴设置,使得处于其紧贴位置上方的成品工件能够偏移从而落向其中一个变径通道内进行定位。
47.对于定位板倾斜的角度,可以根据需求进行调整,在本实施例中,还可以通过伸缩杆配合铰链的结构对定位板的角度进行调节;
48.定位板一端铰接在定位机架上,另一端通过铰链连接有伸缩杆,伸缩杆另一端铰接在机架上,定位板、机架和伸缩杆形成三角形结构,通过伸缩杆的伸缩,能够调整定位板与机架的夹角,从而改变定位板与水平面的夹角,依据成品工件与定位板面的摩擦力对夹角进行调整,若其摩擦力较大,可以适当增大其夹角,方便定位板滑动下落定位,若其摩擦力较小,可以适当减小其夹角,从而避免下落速度过快导致的碰撞损伤。
49.在进行重定位操作时,阵列布置的吸盘按行或列依次释放所抓取的成品工件,使其沿定位板下落,经过重定位后,由吸盘重新抓取排列整齐的成品工件,依次释放、依次重定位后依次重新抓取,对吸盘上的所有成品工件进行重新整理,校正位置,然后输送进行码垛,保证码垛的整齐。
50.实施例2
51.本技术的另一实施例中,还提供一种码垛系统,利用如实施例1中所述的码垛机器人系统。
52.还包括控制系统和人机界面13,集成在人工操作箱12中,人工操作箱是工人操作系统的界面,包括外置的触摸屏、按钮、指示灯、报警灯以及内置的plc模块等元器件。工人通过按钮启动、暂停、急停、复位系统;通过指示灯、报警灯了解系统当前状态;通过触摸屏设置系统参数以及查看系统数据记录。
53.可以理解的是,本实施例中,控制系统和人机界面采用现有的技术方案即可,只要能够实现对元件的控制即可。
54.在机器人的一侧设有多个码盘,用于承载机器人抓取的成品工件,能码放多个码盘,不会因为码盘更换不及时而停机,保证连续生产。
55.使用六轴工业机器人,占地面积小,本体放置位置可调,码盘摆放位置也可调,灵活耐用,运动速度快精度高,可靠性高。
56.吸盘抓具自带缓冲功能,既能保证抓取面紧紧贴合,又能避免硬性磕碰,保护抓具和成品件不受损伤。
57.抓具自身重量轻,且模块化组合,带快换结构,易维修更换。
58.采用真空吸取的方式抓取成品件,结构简单,安全环保耐用。
59.机器人安装在机器人底座11上,码盘围绕机器人设置,方便机器人末端移动到所需位置。
60.自带就地操作箱,触摸屏显示一目了然,按钮操作方便易学。
61.无人值守,并带远程警报功能,可提示远处的工人码盘已满等信息。
62.在金属丝网带的运动路径末端设有回收机构,用于承接未被工业机器人抓取的金属板、石墨板,遗落在金属丝网带上的金属板和未抓取的石墨板会随着金属丝网带滑落入回收机构内,避免了金属板残留导致的碰撞问题。
63.具有漏件自动规避不停机功能,在发生金属板意外漏件事故时,可以自动的跳过当前一列石墨板,直接去下一列抓取金属板,从而避免与遗落在金属传输带上的金属板碰撞,遗漏的金属板和未抓取的石墨板会随着金属传输带滑落至专用接受装置内,这个功能可以保证系统继续运行不需要停机处理。
64.粉末冶金机器人自动下料码垛系统的整个运行流程如下:
65.第一步,机器人将抓具3移动到金属工件15检测等待位,烧结机输出的烧结后的坯块通过金属丝网带输送,坯块为金属工件,下方通过石墨板支撑。
66.第二步,检测到金属工件到达,下降抓取金属工件15。
67.第三步,机器人将金属工件15带到重定位装置4处重新排列。
68.第四步,机器人将金属工件带到对应的第三码盘9、第四码盘10处,进行码垛。
69.第五步,机器人将抓具移动到石墨板14检测等待位,烧结机1输出的石墨板14通过金属丝网带2输送。
70.第六步,检测到石墨板到达,下降抓取石墨板。
71.第七步,机器人将石墨板带到对应的第一码盘7、第二码盘8处,进行码垛。
72.返回第一步,往复循环。
73.降低企业人工成本
74.机器人代替人来进行下料码垛,且全自动运行,可以将原来的下料码垛岗位人员撤除。企业一般是3班2倒,这样一台烧结机就可以至少减少3人,大大降低了人工成本。
75.提升烧结成品件工序转换效率
76.机器人每次可以拿多个工件,且节拍速度可调,能永久保持恒速运行,且码垛整齐牢靠,不需要修整,整体效率大大超出人工下料码垛。
77.降低成品件的损坏率
78.特制的抓取工件抓取牢靠,不会掉落成品件和石墨板,且码垛整齐,不会发生歪倒现象,杜绝了因人工的问题而产生的工件或石墨板掉落摔坏损毁现象,降低了损坏率。
79.排除劳动安全隐患
80.机器人代替工人劳动,就排除了工人被沉重的成品件砸伤以及被粉尘或有害气体损伤身体健康的情况。
81.系统运行可靠
82.系统高成功率的抓取、整齐无误的码放以及模块化快速更换,保证了整个系统拥有极高的可靠度,完全不会耽误整个烧结成品件工序的运转。
83.运行成本降低
84.安全环保的抓取方式和带缓冲且耐用的抓取工具,以及可靠的机器人,使整个系统的运行成本相比于其他方式大大降低。
85.提升企业形象
86.使用粉末冶金机器人自动下料码垛系统,提高了企业的科技化、智能化水平,提升了企业在本行业内的形象,潜在地提升了企业的竞争力。
87.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1