一种自动焊机供料系统的制作方法
1.本实用新型属于汽车零部件技术领域,具体涉及一种自动焊机供料系统。
背景技术:
2.随着人们经济收入的不断提高及汽车制造业的快速发展,汽车作为代步工具进入到更多普通家庭。随着汽车行业的发展,人们对于汽车整车安全性要求越来越高。
3.汽车摆臂的作用是悬架的导向和支撑,其变形影响车轮的定位,降低行车的稳定性,特别是汽车前摆臂存在问题,汽车的方向盘就会出现晃动,行车时容易出现跑偏现象,难以精控车辆行驶方向,因此汽车前摆臂结构的稳定性对于行车安全十分重要。汽车前摆臂通过前摆臂连接件与汽车相连接,前摆臂连接件的加工也是汽车零部件技术领域的重要技术。
4.现现有技术中,对前摆臂连接件的加工大多是先将前摆臂连接件进行半部与半部的分别加工,再通过将半部进行固定焊接从而加工得到前摆臂连接件,但是在加工过程中,通过人工手动进行零件的取放以及焊接加工时,消耗了时间与人工成本,也导致了加工的低效率,且人工进行焊接加工及运送零件时,也容易产生事故。
技术实现要素:
5.为解决上述问题,提供一种自动焊机供料系统,本实用新型采用了如下技术方案:
6.本实用新型提供了一种自动焊机供料系统,用于将多个第一前摆臂连接半部以及相对应的第二前摆臂连接半部依次对焊接设备进行供料,第一前摆臂连接半部包括第一底板以及垂直于底板的第一侧板,第一侧板包括第一侧板部以及与第一侧板部之间呈钝角的第二侧板部,第二前摆臂连接半部包括第二底板以及设置在第二底板的一边向上翻折的第二侧板,第二底板具有底板主体部以及设置在底板主体部的一端且向一侧翻折的翻折部,其特征在于,包括:第一前摆臂连接半部用供料装置,包括第一储料机构以及第一供料端,用于将第一储料机构中堆叠的多个第一前摆臂连接半部依次输送至第一供料端;第二前摆臂连接半部用供料装置,包括第二储料机构以及第二供料端,用于将第二储料机构中堆叠的多个第一前摆臂连接半部依次输送至第二供料端;以及夹持装置,包括第一夹爪以及第二夹爪,分别从第一供料端抓取第一前摆臂连接半部以及从第二供料端抓取第二前摆臂连接半部并输送至焊接设备处,其中,第一前摆臂连接半部用供料装置还包括第一供料端感应器,用于感应第一前摆臂连接半部被输送至第一供料端,第一前摆臂连接半部用供料装置还包括第二供料端感应器,用于感应第二前摆臂连接半部被输送至第二供料端,夹持装置与第一供料端感应器以及第二供料端感应器电连接,夹持装置根据第一供料端感应器以及第二供料端感应器的感应结果对第一前摆臂连接半部以及第二前摆臂连接半部进行拿取。
7.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,第一前摆臂连接半部用供料装置还包括第一挡料机构、第一输送台以及推送机构,第一储料机构的底
端为第一下料端,第一挡料结构设置在第一下料端处,用于对最下方倒数第二块的第一前摆臂连接半部进行阻挡,第一输送台设置在第一下料端的下方,靠近第一下料端的一端为第一推送端,另一端为第一供料端,推送机构设置在第一推送端,将最下方的第一前摆臂连接半部沿推送方向推送至第一供料端。
8.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,推送机构根据第一供料端感应器的感应结果将第一前摆臂连接半部推送至第一供料端。
9.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,第二前摆臂连接半部用供料装置还包括定位机构,设置在第一供料端的一侧,定位机构与第一前摆臂连接半部的底板的一边以及第一侧板部相抵接进行与推送方向的相反方向的限位。
10.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,推送机构具有与前摆臂连接半部的第一底板相匹配的推动端,推动端与第一底板的边缘相接触从而将第一前摆臂连接半部推送至第一供料端,推动端的高度小于第一底板的厚度。
11.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,第二前摆臂连接半部用供料装置还包括第二挡料机构、第二输送台、第一输送机构以及第二输送机构,第二储料机构的底端为第二下料端,第二挡料机构设置在第二下料端处,用于在对最下方的第二前摆臂连接半部进行承托的阻挡位置以及让第二前摆臂连接半部下落的通行位置之间进行切换,第二输送台设置在第二储料机构的下方,该第二输送台位于第二储料机构的正下方的一端为第二推送端,另一端为第二供料端,第一输送机构设置在第二下料端的正下方,将第二前摆臂连接半部输送至第二推送端,第二输送机构设置在第二推送端的一侧,将第二前摆臂连接半部输送至第二供料端。
12.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,第二供料端感应器安装在第二供料端,第二输送机构根据第二供料端感应器的感应结果将第二前摆臂连接半部推送至第二供料端。
13.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,第二前摆臂连接半部用供料装置还包括下料端感应器,设置在第二下料端,用于感应第二前摆臂连接半部被输送至第二推送端,第二挡料机构根据下料端感应器的感应结果在阻挡位置以及通行位置之间进行切换,
14.第一输送机构根据下料端感应器的感应结果将第二前摆臂连接半部输送至第二推送端。
15.本实用新型提供的自动焊机供料系统,还可以具有这样的特征,其中,第二储料机构由两个沿竖直方向且相对设置的储料滑槽构成,储料滑槽顶部的宽度大于其底部的宽度。
16.实用新型作用与效果
17.根据本实用新型的自动焊机供料系统,用于将多个第一前摆臂连接半部以及相对应的第二前摆臂连接半部依次对焊接设备进行供料,包括第一前摆臂连接半部用供料装置、第二前摆臂连接半部用供料装置以及夹持装置。其中,第一前摆臂连接半部用供料装置用于将堆叠的第一前摆臂连接半部依次输送至第一供料端,第二前摆臂连接半部用供料装置用于将堆叠的第二前摆臂连接半部依次输送至第二供料端,再由夹持装置根据设置在第一供料端以及第二供料端的供料端感应器的感应结果依次从第一供料端以及第二供料端
处夹取第一前摆臂连接半部以及第二前摆臂连接半部并输送至焊接设备处。本实用新型的自动焊机供料系统能够通过第一前摆臂连接半部用供料装置以及第二前摆臂连接半部用供料装置将两个前摆臂连接半部依次输送至供料端,夹持装置再通过设置在供料端处的感应器的感应结果进行夹取,从而实现对焊接设备的自动供料,相较于现有技术中人工进行焊机供料,减少了人工成本也较为安全。
附图说明
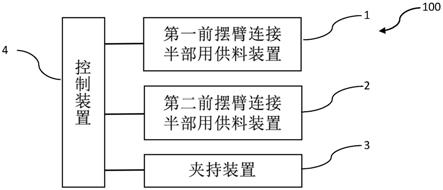
18.图1是本实用新型实施例的自动焊机供料系统的结构框图;
19.图2是本实用新型实施例的第一前摆臂连接半部用供料装置的俯视结构示意图;
20.图3是本实用新型实施例的第一前摆臂连接半部用供料装置的侧视结构示意图;
21.图4是本实用新型实施例的第一前摆臂连接半部的俯视结构示意图;
22.图5本实用新型实施例的第一前摆臂连接半部的侧视结构示意图;
23.图6是本实用新型实施例的第一储料机构与第一前摆臂连接半部相配合的俯视结构示意图;
24.图7是本实用新型实施例的第一前摆臂连接半部用供料装置的剖视结构示意图;
25.图8是本实用新型实施例的第二前摆臂连接半部用供料装置的俯视结构示意图;
26.图9是本实用新型实施例的第二前摆臂连接半部的主视结构示意图;
27.图10是本实用新型实施例的第二前摆臂连接半部的俯视结构示意图;
28.图11是本实用新型实施例的第二前摆臂连接半部的侧视结构示意图;
29.图12是本实用新型实施例的第二前摆臂连接半部用供料装置的左视结构示意图;
30.图13是本实用新型实施例的第二前摆臂连接半部用供料装置的主视结构示意图;
31.图14是本实用新型实施例的储料滑槽的结构示意图;
32.图15是本实用新型实施例的夹持装置的结构示意图。
具体实施方式
33.以下结合附图以及实施例来说明本实用新型的具体实施方式。
34.<实施例>
35.本实施例提供一种自动焊机供料系统,用于将多个第一前摆臂连接半部以及相对应的第二前摆臂连接半部依次对焊接设备进行供料。
36.图1是本实用新型实施例的自动焊机供料系统的结构框图。
37.如图1所示,自动焊机供料系统100包括第一前摆臂连接半部用供料装置1、第二前摆臂连接半部用供料装置2、夹持装置3以及控制装置4。
38.第一前摆臂连接半部用供料装置1、第二前摆臂连接半部用供料装置2以及夹持装置3均与控制装置4相连接。
39.图2是本实用新型实施例的第一前摆臂连接半部用供料装置的俯视结构示意图,图3是本实用新型实施例的第一前摆臂连接半部用供料装置的侧视结构示意图。
40.如图2以及图3所示,第一前摆臂连接半部用供料装置1包括第一输送台11、第一储料机构12、第一挡料机构13、推送机构14、定位机构15以及第一供料端感应器16,用于将堆叠的多个第一前摆臂连接半部200对焊接设备进行供料。
41.图4是本实用新型实施例的第一前摆臂连接半部的俯视结构示意图,图5本实用新型实施例的第一前摆臂连接半部的侧视结构示意图。
42.如图4以及图5所示,第一前摆臂连接半部200包括第一底板201以及侧板202。
43.侧板202呈板状,具有第一侧板部203以及第二侧板部204,第一侧板部203呈矩形,第二侧板部204呈矩形,第二侧板部204与第一侧板部203之间呈钝角,且第二侧板部204的长度小于第一侧板部203。
44.第一侧板部203以及第二侧板部202均第一底板201相连接且垂直于第一底板201向上延伸设置。
45.第一底板201呈板状,与侧板202相连接的一边为连接边205,连接边205具有翻折部,即与第一侧板部203以及侧板202相匹配。
46.连接边205靠近第二侧板部204的一端设置有垂直于第二侧板部204的第一侧边206,第一侧边206的另一端设置有平行于第二侧板部204的斜边207,即斜边207与侧板202相对设置。
47.连接边205靠近第一侧板部203的一端设置有与第一侧板部203之间呈钝角的锯齿边208,锯齿边208上沿长度方向分布有三个凹部,锯齿边208远离侧板202的一端设置有与锯齿边208之间呈钝角的第二侧边209,第二侧边209的另一端与斜边207相连接且与斜边207之间呈直角。
48.斜边207的长度大于锯齿边208的长度,锯齿边208的长度远大于第一侧边206以及第二侧边209的长度。
49.如图2以及图3所示,第一输送台11具有横截面为矩形的第一承托台111以及设置在第一承托台111上沿水平方向延伸第一输送轨道112。
50.第一输送轨道12具有两条互相平行的侧轨1121。
51.第一承托台111的一端的两条侧轨1121之间镂空设置,第一输送轨道112远离该镂空部分的另一端为第一供料端113,镂空部分远离第一承托台111的端部的一端第一推送端114。
52.第一推送端114至第一供料端113的方向为第一推送方向a。
53.如图2以及图3所示,第一储料机构12包括第一储料滑槽121以及第二储料滑槽122。第一储料滑槽121以及第二储料滑槽122分别设置在第一输送轨道112的两侧,且与第一输送台11,即水平方向之间呈一定的角度倾斜设置,用于储存堆叠的第一前摆臂连接半部200。
54.图6是本实用新型实施例的第一储料机构与第一前摆臂连接半部相配合的俯视结构示意图。
55.如图6所示,第一储料滑槽121呈截面为矩形的柱状,其一端设置在第一输送台11的第一推送端114处的其中一条侧轨1121的一侧,另一端沿向远离第一供料端113的方向倾斜设置,即第一储料滑槽121与第一推送方向a之间呈钝角。
56.第一储料滑槽121通过固定组件123固定在第一承托台111上。固定组件123包括固定板1231、第一固定件1232以及第二固定件1233。
57.固定板1231沿第一推送方向a固定在第一承托台111的第一储料滑槽121远离第一输送轨道112的一侧。
58.第一固定件1232设置在第一储料滑槽121远离第一推送端114的一侧,包括连接部1234以及调节部1235。连接部1234呈之字形,一端通过两个固定螺钉1234a固定在第一储料滑槽121上,另一端设置在远离第一输送轨道112的一侧。
59.调节部1235的一端与连接部1234远离第一输送轨道112的一端固定连接,且包括沿竖直方向向靠近第一承托台111的方向延伸的弯折部,调节部1235的另一端呈板状并通过两个固定螺钉1235a与固定板1231固定连接。
60.第二固定件1233设置在第一储料滑槽121靠近第一推送端113的一侧,呈台阶状,一端与第一储料滑槽121远离第一输送轨道112的一侧固定连接,另一端通过两个固定螺钉1233a与固定板1231固定连接。
61.第一储料滑槽121与第一推送方向a之间的夹角,即第一储料滑槽121的倾斜角度可调节,具体地,通过对第一固定件1232以及第二固定件1233与固定板1231的连接面之间增加垫片后再通过固定螺钉连接,即调整第一固定件1232以及第二固定件1233的高度微调第一储料滑槽121的倾斜角度。
62.当需要使得第一储料滑槽121与第一推送方向a之间的夹角减小时,即使得第一储料滑槽121远离第一推送端114的一端与第一承托台111之间的距离增大时,则增加第一固定件1232的调节部1235与固定板1231之间的垫片;当需要使得第一储料滑槽121与第一推送方向a之间的夹角增大时,则增加第二固定件1233与固定板1231之间的垫片。
63.第二储料滑槽122平行于第一储料滑槽121设置,其一端设置在第一推送端114处的另一条侧轨1121的一侧,包括滑槽承托部1221以及滑槽限位部1222。
64.滑槽限位部1222呈柱状,与第一储料滑槽121平行设置,即也与第一推送方向a之间呈钝角。
65.滑槽承托部1221呈板状,其一边与滑槽限位部1222靠近第一输送台11的一边相连接,且与滑槽限位部1222之间呈钝角。
66.第二储料滑槽122也通过固定组件123固定在第一承托111的另一条侧轨1121上,该固定组件123与第一储料滑槽122的固定组件123相同,方向相反,即第二储料滑槽122的倾斜角度也可与第一储料滑槽122一同调节。
67.图7是本实用新型实施例的第一前摆臂连接半部用供料装置的剖视结构示意图(第一储料机构未示出)。
68.如图6以及图7所示,第一储料滑槽121与第二储料滑槽122之间形成储料腔,多个第一前摆臂连接半部200堆叠储存在该储料腔中。
69.第一储料滑槽121与第一前摆臂连接半部200的第一底板201的锯齿边208相抵触进行限位,第二储料滑槽122的滑槽承托1221与第一底板201的斜边207相匹配且向抵触进行限位,即第一前摆臂连接半部200的侧板202靠近第一输送台11设置,第二侧板部204靠近第二储料滑槽122设置。
70.第一前摆臂连接半部200沿与第一推送方向a呈一定的角度的堆叠,即除了最下方的第一前摆臂连接半部200,剩余的第一前摆臂连接半部200的第一底板201与第一承托台111呈角度较小的锐角进行堆叠。
71.第一储料机构12的底端,即靠近最下方的第一前摆臂连接半部200的一端为第一下料端124。
72.第一挡料机构13设置在包括第一限位件131以及第二限位件132,第一限位件131以及第二限位件132分别设置在第一储料机构12的第一下料端124的两侧。
73.第一限位件131设置在第一储料滑槽121靠近第一下料端124的一侧,包括第一挡料固定部1311、第一挡料延伸部(未在图中示出)以及第一挡料限位部1313。
74.第一挡料固定部1311呈板状,与第一储料滑槽121侧的固定板1231通过螺钉固定连接。
75.第一挡料延伸部设置在第一挡料固定部1311靠近第一输送轨道112的一端,且沿竖直方向向上延伸。
76.第一挡料延伸部的另一端设置有第一挡料限位部1313,第一挡料限位部1313呈沿水平方向延伸的条状,且其长度方向垂直于第一推送方向a。
77.第二限位件132设置在第二储料滑槽122靠近第一下料端124的一侧,包括第二挡料固定部1321、第二挡料延伸部(未在图中示出)以及第二挡料限位部1323。
78.第二挡料固定部1321呈板状,与第二储料滑槽122侧的固定板1231通过螺钉固定连接。
79.第二挡料延伸部设置在第二挡料固定部1321靠近第一输送轨道112的一端,且沿竖直方向向上延伸,其高度与第一挡料延伸部相等。
80.第二挡料延伸部的另一端设置有第一挡料限位部1323,第一挡料限位部1313呈沿水平方向延伸的条状,第一挡料限位部1313远离第二挡料延伸部的一端相靠近第一下料端124的方向延伸,其长度方向与第一挡料延伸部的长度方向之间的夹角等于第一前摆臂连接半部200的第一侧板部203与第二侧板部204之间的夹角。
81.如图7所示,若第一挡料延伸部以及第二挡料延伸部的高度,即第一挡料限位部1313以及第二挡料限位部1323到输送台的高度为h;前摆臂连接半部200的侧板202的高度,即第一储料机构12中最下方的第一前摆臂连接半部200的最顶端到第一输送台11的高度为h1;第一储料机构12中最下方倒数第二个第一前摆臂连接半部200的最顶端到第一输送台11的高度为h2,则h1<h<h2。
82.由于h1<h<h2,第一挡料机构13对第一储料机构12中的最下方倒数第二块的第一前摆臂连接半部200进行阻挡,即第一限位件131的第一挡料限位部1313与该第一前摆臂连接半部200的第一侧板部203相抵触进行限位,第二限位件132的第二挡料限位部1323与第二侧板部204相抵触进行限位。
83.同时,第一挡料机构13对最下方的第一前摆臂连接半部200没有阻挡。最下方的第一前摆臂连接半部200通过重力落在第一推送端114上,其第二侧板部204的长度方向与第一推送方向a相垂直,其斜边207与第一推送方向a呈一定的角度。
84.推送机构14与控制装置4相连接,包括驱动件141以及第一推动件142。驱动件141设置第一输送台11远离第一供料端113的一端,本实施例中,驱动件141为气缸。
85.第一推动件142与驱动件141相连接并由驱动件141驱动,呈板状,设置在第一输送轨道112的两个侧轨1121之间,且可沿第一推送方向a伸缩。
86.第一推动件142可在第一推送端114以及第一供料端113之间移动,且第一推动件142靠近第一供料端113的一端为推动端1421,推动端1421具有与第一前摆臂连接半部200的斜边207相匹配的倾斜边。
87.第一推动件142的沿竖直方向的高度范围为第一前摆臂连接半部200的第一底板201的厚度的2/3~3/4。
88.第一推动件142由驱动件141驱动,其推动端1421与第一储料机构12中最下方的第一前摆臂连接半部200的斜边207相接触从而将第一前摆臂连接半部200推送由第一推送端114推送至第一供料端113。
89.定位机构15设置在第一供料端113,包括第一定位件151以及第二定位件152。
90.第一定位件151以及第二定位件152呈块状,分别设置在第一输送轨道112的末端以及靠近第一储料滑槽121的一侧。
91.第一定位件151沿垂直于第一推送方向a的方向设置,第二定位件152与第一定位件151之间的夹角等于第一前摆臂连接半部200的第一侧板部203与锯齿边208之间的夹角。
92.当第一前摆臂里连接半部200被推送机构14推送到第一供料端113处时,第一定位件151与该第一前摆臂连接半部200的第一侧板部203相接触且第二定位件152与锯齿边208相接触使得定位机构15对该第一前摆臂连接半部200进行与第一推送方向a相反方向的限位。
93.第一供料端感应器16与控制装置4相连接,设置在第一定位件151处,用于感应第一前摆臂连接半部200是否被输送至第一供料端113并被夹持装置3取走,控制装置4根据第一供料端感应器16的感应结果控制推送机构14对第一前摆臂连接半部200进行推送,即当第一供料端感应器16感应到第一供料端113上没有第一前摆臂连接半部200时,推送机构14才进行推送;同时当第一供料端感应器16感应到第一供料端113上有第一前摆臂连接半部200时,夹持装置3对第一供料端113上的第一前摆臂连接半部200进行抓取。
94.图8是本实用新型实施例的第二前摆臂连接半部用供料装置的俯视结构示意图。
95.如图8所示,第二前摆臂连接半部用供料装置2包括第二输送台21、第二储料机构22、第二挡料机构23、第一输送机构24、第二输送机构25、第二供料端感应器26以及下料端感应器27,用于将堆叠的多个第二前摆臂连接半部300对焊接设备进行供料。
96.图9是本实用新型实施例的第二前摆臂连接半部的主视结构示意图,图10是本实用新型实施例的第二前摆臂连接半部的俯视结构示意图,图11是本实用新型实施例的第二前摆臂连接半部的侧视结构示意图。
97.如图9~图11所示,第二前摆臂连接半部300包括底板301、第一侧板302以及第二侧板303。
98.第二底板301呈板状,具有呈矩形的底板主体部304以及设置在底板主体部304的一端且向一侧翻折的翻折部305,翻折部305与底板主体部304呈钝角,底板主体部304上设置有两个固定孔。
99.第一侧板302以及第二侧板303分别设置在第二底板301相对的两侧边且向翻折部305翻折的相反方向翻折并垂直于底板主体部304。第一侧板302呈三角形,同时与底板主体部304以及翻折部305的侧边相连接。第一侧板302远离翻折部305的一端还设置有向靠近第二底板301方向翻折的侧板翻折部307。
100.第二侧板303呈矩形,且面积小于第一侧板302,第二侧板303远离底板主体部304的一边靠近翻折部305设置有倾斜边306,该倾斜边306与相邻两边的夹角为圆角。
101.图12是本实用新型实施例的第二前摆臂连接半部用供料装置的左视结构示意图,
图13是本实用新型实施例的第二前摆臂连接半部用供料装置的主视结构示意图。
102.图8、图12以及图13均为示意图,如图8、图12以及图13所示,第二输送台21具有横截面为矩形的第二承托台211以及设置在第二承托台211上的第二输送轨道212。
103.第二承托台211的一端设置有第一轨道部2111以及第二轨道部2112,第一轨道部2111与第二轨道部2112的横截面均呈矩形,沿第一水平方向延伸,第一轨道部2111与第二轨道部2112之间设置有间隙,且第一轨道部2111沿第一水平方向的长度小于第二轨道部2112。
104.第二输送轨道212设置在第二承托台211的第一轨道部2111以及第二轨道部2112上。
105.第二输送轨道212沿水平方向延伸,包括设置在第一轨道部2111上的第一侧轨2121以及设置在第二轨道部2112上的第二侧轨2122,第一侧轨2121以及第二侧轨2122均呈条状,起到对第二前摆臂连接半部300的导向限位作用。
106.第一侧轨2121以及第二侧轨2122的末端分别与第一轨道部2111以及第二轨道部2112的末端对齐,即第一侧轨2121的长度小于第二侧轨2122,且第一侧轨2121与第二侧轨2122之间具有间隙。
107.第一侧轨2121以及第二侧轨2122之间还设置有呈板状的输送轨道主体2123,输送轨道主体2123设置在第一侧轨2121以及第二侧轨2122之间的第二承托台211上,且输送轨道主体2123的端部与第二侧轨2122的端部相对齐。
108.第一侧轨2121、第二侧轨2122以及输送轨道主体2123与第二前摆臂连接半部300相匹配,即第二前摆臂连接板部300在第二输送轨道212上被输送时,其第二底板301与输送轨道主体2123相贴,且第二底板301的翻折部305通过输送轨道主体2123与第一侧轨2121之间的间隙相匹配,第二前摆臂连接半部300的侧板翻折部307以及第一侧板302远离侧板翻折部307的一边分别与第二侧轨2122以及第一侧轨2121相接触进行导向限位。
109.第二输送轨道212远离第二承托台211的一端为第二供料端215,第二输送轨道212靠近第二承托台211的一端为第二推送端216。
110.第二储料机构22设置在第二输送轨道212的第二推送端216的上方,储存有多个第二前摆臂连接板部300。具体地,第二储料机构22包括两个储料滑槽221以及两个滑槽固定件222。
111.两个储料滑槽221沿竖直方向分别通过滑槽固定件222固定在第二推送端216的两侧的第二承托台211的台面上。
112.图14是本实用新型实施例的储料滑槽的结构示意图。
113.如图14所示,储料滑槽221包括第一滑槽半部2211、第二滑槽半部2212、滑槽连接件2213以及限位螺钉2214。
114.第一滑槽半部2211沿竖直方向设置,其横截面呈l形,即具有互相垂直的第一滑槽板2216以及第二滑槽板(未在图中显示),第一滑槽板2216以及第二滑槽板通过沿竖直方向排列的固定螺钉2217固定连接。
115.第二滑槽半部2212与第二滑槽板相同,设置在第一滑槽板2216远离第二滑槽板的一端,并与第一滑槽板2216在水平方向上相垂直。
116.第二滑槽半部2212在竖直方向上与第一滑槽板2216具有一定的角度,即第二滑槽
半部2212的顶端与第一滑板2216的顶端,即远离第二推送端216的一端之间的间隙大于第二滑槽半部2212的底端与第一滑槽板2216的底端,即靠近第二推送端216的一端之间的间隙。
117.第二滑槽半部2212靠近第一滑槽板2216的一端设置有三个滑槽连接件2213。
118.滑槽连接件2213的横截面呈l形,包括第一连接部2218以及垂直于第一连接部2218的第二连接部(未在图中显示)。
119.第二连接部与第二滑槽半部2212通过固定螺钉2219固定连接。
120.第一连接部2218与第二连接部相垂直并向靠近第一滑槽板2216的方向延伸,第一连接部2218上设置有条状的调节通孔2215。
121.限位螺钉2214穿过调节通孔2215与第一滑槽板2216的边缘固定连接,从而使得第一滑槽板2216与第二滑槽半部2212固定连接,且由于第二滑槽板部2212与第一滑槽板2216之间的距离随着高度的变化而变化,限位螺钉2214与调节通孔2215的在水平方向上的相对位置随滑槽连接件2213设置在第二滑槽半部2212的不同高度的变化而变化。
122.通过调节限位螺钉2214与调节通孔2215的相对位置,可以调节第一滑槽板2216与第二滑槽半部2212之间的距离,从而调节该储料滑槽221的宽度。
123.两个储料滑槽221互相平行,第一滑槽半部2211与第二滑槽半部2212所围成的凹槽相对设置,两个储料滑槽221远离第二供料端215的一面通过设置在两个储料滑槽221底部的两根限位梁210相连接,两根限位梁210互相平行且沿水平方向设置。
124.两个储料滑槽221的底部分别与第一轨道以及第二轨道相连接并通过呈阶梯状的滑槽固定件222固定在第二承托台211上。
125.两个储料滑槽221的相对设置的凹槽配合形成储料腔,储料腔中堆叠有多个第二底板301向下的第二前摆臂连接半部300,每个第二前摆臂连接半部300的第二底板301的底面与下一个第二前摆臂连接半部300的第二侧板303的顶边相抵,通过倾斜边306形成缝隙,即每两个相邻的第二前摆臂连接半部300之间具有缝隙。
126.储料滑槽221的远离第二推送端216一侧的限位梁210与两个储料滑槽221的凹槽组成的端部为第二储料机构22的第二下料端223,第二推送端216即设置在第二下料端223的正下方。
127.第二挡料机构23用于对第二储料机构22中的最下方的第二前摆臂连接半部300进行承托以及控制其下落,包括两个分别设置在第二下料端223的第二输送轨道214两侧的挡料驱动件231。
128.两个挡料驱动件231中分别连接有由挡料驱动件231驱动并能向水平方向伸缩的档杆232,两个档杆232相对设置,且档杆232靠近下料端223设置有承托面。
129.两个挡料驱动件231分别通过挡料固定件233固定在第二承托台211的第一侧轨2121以及第二侧轨2122远离第二储料机构22的两侧的台面上。
130.本实施例中,挡料驱动件231为气缸。
131.当第二挡料机构23处于阻挡位置时,档杆232向靠近第二下料端223的中心方向伸出,档杆232的承托面与第二储料机构22中的最下方的第二前摆臂连接半部300的第二底板301相接触从而对堆叠的第二前摆臂连接半部300进行承托。
132.当第二挡料机构23处于通行位置时,档杆232缩回挡料驱动件231内,即使得最下
方的第二前摆臂连接半部300在第二下料端223处通过重力下落。
133.第一输送机构24设置在第二下料端223的正下方,包括第一驱动件241以及承托件242。本实施例中,第一驱动件241为气缸。
134.承托件242由第一驱动件241驱动并可沿竖直方向伸缩,承托件242设置在下料端23的正下方,可通过第二输送台21的第一轨道部2111与第二轨道部2112之间的间隙伸出至第二下料端223处。
135.承托件242包括推杆2421以及承托部2422,推杆2421可沿竖直方向移动,承托部2422设置在推杆2421的顶部,其截面为凹字形,即顶部的两端具有沿靠近第二下料端223方向延伸的承托凸部2423。两个承托凸部2423的顶面为承托面,与第二前摆臂连接半部300的底板主体部304的底面相接触进行承托。
136.当第二挡料机构23处于通行位置时,最下方的第二前摆臂连接半部300通过重力下落至承托件242的承托部2422上,再通过推杆2421的向下移动使得前摆臂连接半部300由第二下料端223输送至第二推送端216上。
137.第二输送机构25设置在第二承托台211的台面上。第二输送机构25包括第二驱动件251以及第二推动件252。
138.第二驱动件251设置在第二承托台211上,其靠近第二推送端216的一端设置有可沿水平方向伸缩的第二推动件252,第二推动件252由第二驱动件251驱动。
139.第二推动件252与承托件242结构相同,包括推杆2521以及推动部2522,推杆2521可沿水平方向移动,推动部2522设置在推杆2521的端部,其截面为凹字形,即靠近第二推送部216的一面的两个端部分别设置有向靠近第二推送部216方向延伸的推送凸部2523。
140.当第一输送机构24将第二前摆臂连接半部300由第二下料端223输送至第二推送端216上时,第二前摆臂连接半部300的第一侧板302靠近第二推动件252,第二推动件252与第一侧板302相抵触并通过推杆2521将第二前摆臂连接半部300由推送部216通过第二输送轨道214推送至第二供料端215,即沿第二推送方向b移动。第二输送轨道214与第二前摆臂连接半部300的第二底板301相匹配。
141.第一推送方向a与第二推送方向b相同。
142.本实施例中,第二供料端感应器26、下料端感应器27、第二挡料机构23、第一输送24以及第二输送机构25均与控制装置4电连接。
143.第二供料端感应器26设置第二供料端215处,用于感应第二前摆臂连接半部300按是否被输送至第二供料端223并被夹持装置3取走,第二输送机构25则根据感应结果进行推送,即当第二供料端感应器26感应到第二供料端223上没有第二前摆臂连接半部300,第二输送机构25才进行推送。
144.下料端感应器27设置在第二下料端223处,用于感应第一输送机构24上是否有第二前摆臂连接半部300,第二挡料机构23根据感应结果进行阻挡位置以及通行位置的切换,第一输送机构24也同时进行承托件242的伸缩,即当下料端感应器27感应到第一输送机构24上没有第二前摆臂连接半部300,第二挡料机构23才切换至同行位置,同时,第一输送机构24的承托件242上升至第二下料端223处。
145.图15是本实用新型实施例的夹持装置的结构示意图。
146.如图15所示,夹持装置3包括固定部31、机械臂32、夹爪安装部33、第一夹爪34以及
第二夹爪35。
147.机械臂32安装在固定部31上,其远离固定部31的一端可在第一前摆臂连接半部用供料装置1的第一供料端113、第二前摆臂连接半部用供料装置2的第二供料端215以及焊接设备之间进行移动。
148.夹爪安装部33固定在机械臂32远离固定部31的一端,与第一夹爪34以及第二夹爪35相匹配。
149.第一夹爪34以及第二夹爪35安装在夹爪安装部33上。
150.当夹持装置3工作时,第一夹爪34从第一前摆臂连接半部用供料装置1的第一供料端113处夹取第一前摆臂连接半部200的第二侧板部204,第二夹爪35从第二前摆臂连接半部用供料装置2的第二供料端215处夹取第二前摆臂连接半部300的翻折部305,第一夹爪34以及第二夹爪35夹取后的第一前摆臂连接半部200与第二前摆臂连接半部300互不干涉。
151.第一夹爪34以及第二夹爪35分别夹取第一前摆臂连接半部200以及第二前摆臂连接半部300后再通过机械臂32将第一前摆臂连接半部200以及第二前摆臂连接半部300运送至焊接设备处。
152.本实施例的自动焊机供料系统100的工作过程如下:
153.步骤s1
‑
1,第一前摆臂连接半部用供料装置1的第一储料机构12中存储有多个堆叠的第一前摆臂连接半部200,第一挡料机构13对最下方倒数第二块的第一前摆臂连接半部200进行阻挡,最下方的第一前摆臂连接半部200因为重力落在第一输送轨道12的第一推送端114上;
154.步骤s1
‑
2,第一供料端感应器16感应到第一供料端113上没有第一前摆臂连接半部200,则控制装置4就控制推送机构14的第一推动件142将第一前摆臂连接半部200由第一推送端114推送至第一供料端113;
155.步骤s1
‑
3,定位机构15对推送至第一供料端113的第一前摆臂连接半部200进行限位,使之固定在第一供料端113处;
156.步骤s1
‑
4,推送机构14的第一推动件142退回第一推送端114前,则第一储料机构12中原最下方倒数第二个第一前摆臂连接半部200因为重力由第一下料端124下落至第一输送轨道112的第一推送端114处,第一挡料机构13对再上一个第一前摆臂连接半部200进行阻挡;
157.步骤s2
‑
1,第二前摆臂连接半部用供料装置2的第二储料机构22中储存有多个堆叠的第二前摆臂连接半部300,第二挡料机构23的档杆232伸出,即第二挡料机构23处于阻挡位置;
158.步骤s2
‑
2,下料端感应器27感应到第一输送机构24上没有第二前摆臂连接半部300,控制装置4即控制第二挡料机构23的档杆232缩回挡料驱动件231中,即第二挡料机构23处于通行位置,使得最下方的第二前摆臂连接半部300通过重力落下,同时,控制装置4控制第一输送机构24的承托件242通过第一驱动件241驱动升至下料端223处,则第二前摆臂连接半部300落至承托件242上;
159.步骤s2
‑
3,档杆232在最下方的第二前摆臂连接半部300下落后即重新向第二下料端223的中心伸出,即使得第二挡料机构23切换至阻挡位置,由于两个第二前摆臂连接半部300之间具有间隙,所以档杆232能够对最下方的第二前摆臂连接半部300相邻的第二前摆
臂连接半部300进行阻挡;
160.步骤s2
‑
4,第二挡料机构23切换至阻挡位置后,第一输送机构24的第一驱动件241就驱动承托件242向下移动,使得第二前摆臂连接半部300被输送至第二推送部216;
161.步骤s2
‑
5,第二供料端感应器27感应到第二供料端215上没有第二前摆臂连接半部200,则控制装置4就控制第二输送机构25的第二驱动件251驱动第二推动件252将第二前摆臂连接半部300推送至第二供料端223,
162.步骤s3,第一供料端感应器16感应到第一供料端113上有第一前摆臂连接半部200,控制装置4就控制夹持装置3的第一夹爪34抓取第一前摆臂连接半部200;
163.步骤s4,第二供料端感应器27感应到第二供料端215上有第二前摆臂连接半部300,控制装置4就控制夹持装置3的第二夹爪35抓取第二前摆臂连接半部300;
164.步骤s5,夹持装置3将第一前摆臂连接半部200以及第二前摆臂连接半部300运送至焊接设备处。
165.实施例作用与效果
166.本实施例提供一种自动焊机供料系统,用于将多个第一前摆臂连接半部以及相对应的第二前摆臂连接半部依次对焊接设备进行供料,包括第一前摆臂连接半部用供料装置、第二前摆臂连接半部用供料装置以及夹持装置。其中,第一前摆臂连接半部用供料装置用于将堆叠的第一前摆臂连接半部依次输送至第一供料端,第二前摆臂连接半部用供料装置用于将堆叠的第二前摆臂连接半部依次输送至第二供料端,再由夹持装置根据设置在第一供料端以及第二供料端的供料端感应器的感应结果依次从第一供料端以及第二供料端处夹取第一前摆臂连接半部以及第二前摆臂连接半部并输送至焊接设备处。本实施例的自动焊机供料系统能够通过第一前摆臂连接半部用供料装置以及第二前摆臂连接半部用供料装置将两个前摆臂连接半部依次输送至供料端,夹持装置再通过设置在供料端处的感应器的感应结果进行夹取,从而实现对焊接设备的自动供料,相较于现有技术中人工进行焊机供料,减少了人工成本也较为安全。
167.进一步,本实施例提供的自动焊机供料系统中,第一前摆臂连接半部用供料装置的推送机构根据第一供料端感应器的感应结果将第一前摆臂连接半部推送至第一供料端,进一步实现第一前摆臂连接半部用供料装置的供料过程的自动化。
168.进一步,本实施例提供的自动焊机供料系统中,第一前摆臂连接半部用供料装置还包括设置在第一供料端的定位机构,该定位机构可以对推送机构推送至供料端的第一前摆臂连接半部进行限位,使第一前摆臂连接半部不会偏离第一供料端,防止夹持装置进行夹取时不能抓取到该前摆臂连接半部从而影响供料过程。
169.进一步,本实施例提供的自动焊机供料系统中,第二前摆臂连接半部用供料装置还包括下料端感应器,用于感应第二前摆臂连接半部是否被输送至第二推送端,进而控制第二挡料机构以及第一输送机构进行挡料通行以及输送,进一步使得本实施例的第二前摆臂连接半部用供料装置的第二挡料机构以及竖直方向的输送过程实现自动化控制,减少了过程中错误以及故障的发生。
170.进一步,本实施例提供的自动焊机供料系统中,第二前摆臂连接半部用供料装置的第二输送机构根据第二供料端感应器的感应结果将第二前摆臂连接半部推送至第二供料端,进一步实现第二前摆臂连接半部用供料装置的供料过程的自动化。
171.进一步,本实施例提供的自动焊机供料系统中,第二前摆臂连接半部用供料装置的第二储料机构为储料滑槽,储料滑槽顶部的宽度大于其底部的宽度,使得放置在第二储料机构中的第二前摆臂连接半部不容易被卡住。
172.上述实施例仅用于举例说明本实用新型的具体实施方式,而本实用新型不限于上述实施例的描述范围。
173.上述实施例中,第一挡料机构以及第二挡料机构的驱动件为气缸,在其他实施例中,驱动件也可以设置为其他驱动结构比如电推杆等。
174.上述实施例中,第一夹爪以及第二夹爪在夹爪安装部上的分布使得抓取后的第一前摆臂连接半部以及第二前摆臂连接半部互不干涉,即可以使得第一夹爪以及第二夹爪分布得较远,也可以使得第一夹爪以及第二夹爪的夹持方向之间呈一定的角度,即第一夹爪以及第二夹爪夹取后的第一前摆臂连接半部的第一底板的平面延伸方向与第二前摆臂连接半部的第二底板的底板主体部的平面延伸方向之间呈接近90度的锐角,从而使得第一前摆臂连接半部以及第二前摆臂连接半部互相不接触。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1