夹具和具有这种夹具的移动式升降系统的制作方法
本发明涉及一种具有升降单元的升降系统,其具有安装的夹具。该夹具包括两个夹持臂,夹持臂可移动地连接至支撑件,其中夹持臂可以抓取物品。致动器用于移动所述夹持臂并对物件施加夹持压力。
背景技术:
1、使用夹具抓取物件,例如管子,是一种已知的技术,其中夹持臂会在所述物件上持续施加压力。夹持臂可以通过将油泵入连接至夹持臂的液压缸来手动地激活。升降系统的控制面板上的压力计可以提供何时达到足够升起物件的夹持压力的读数。
2、如果夹持压力过高,小的物件容易翘曲,由此受到损坏。相反,较大的物件则需要较高的夹持压力,以确保这些物件可以被抬升起来。
3、对于已知的升降系统,目前还不可以根据不同物件的大小和尺寸来调节夹持压力,这意味着升降系统设置为施加预定的、恒定的夹持压力。
4、us2017/0283228a1公开了一种非传统的夹具,其包括两个液压缸,每个液压缸连接至一个伸缩夹持臂。该夹持臂可以在两个阶段延伸,其中外伸缩元件延伸至第一最大位置,然后,内伸缩元件进一步延伸至第二最大位置。这种夹具对物体施加的是阶梯式的夹持压力,其中在两个压力阶段之间的过渡期难以控制实际的夹持力。
5、卡斯卡特公司的hfc+系统包括两组用于夹持纸卷的夹持臂,其中夹持力将根据物体的称重自动进行调节。利用压力开关,夹持力在较低的夹持力和较高的夹持力之间自动进行切换。
6、发明目的
7、本发明的目的在于提供一种克服已知技术中存在的问题的夹具和升降系统。
8、本发明的另一目的在于提供一种能够安全地、小心地抓取不同物件的夹具和升降系统。
9、本发明的第三个目的在于提供一种使较小物件损坏的风险最小化的夹具和升降系统。
技术实现思路
1、本发明通过提供一种用于移动式升降系统的夹具将其与已知技术区分开来,该夹具包括
2、-支撑部,所述支撑部具有接合部,接合部配置为连接至升降系统中的升降单元上相应的接合部,
3、-夹持臂,所述夹持臂设置在支撑部的每一端,其中夹持臂的一端可移动地连接至支撑部,优选地,可旋转地连接至支撑部,且另一端配置为夹取物件,
4、-致动系统,所述致动系统设置在支撑部上,并连接到至少一个夹持臂,其中致动系统包括至少一个致动器,该至少一个致动器配置为在打开位置和至少一个夹持位置之间移动至少一个夹持臂,优选地,绕着支撑部沿旋转轴旋转至少一个夹持臂,
5、-其中致动系统配置为用夹持压力夹取物件,且基于夹持臂的位置调节所述夹持压力,其中夹持压力在打开位置和至少一个夹持位置之间逐渐进行调节。
6、由此提供了一种改进的夹具,它使升降过程中损坏物件的风险最小化,并允许根据不同物件的大小和尺寸改变夹持压力。该夹具特别适合搬运卷状物,但其也适用于其他物件,例如桶、管道、盒子、板条箱、罐子等等。与其他已知的夹具相比,通过根据物件的大小和/或尺寸自动调节夹持压力,由此实现了对物件安全的、小心的搬运。
7、夹具包括具有接合部的支撑部,该接合部适于直接或间接地安装至升降单元,作为升降系统的一部分。升降单元包括相应的接合部,该接合部适于安装夹具和/或旋转单元。夹具上和/或升降单元上的接合部可包括一个或多个连接件,使得夹具能被连接至升降系统上的内部能源和/或控制单元。连接件可包括液压或气动连接元件、电力电缆和/或类似的连接元件。由此,夹具可以安装在任何升降系统上,优选为移动式升降系统。因此,可以通过控制单元控制夹具和/或通过升降系统上的能源驱动夹具。
8、夹具包括两个附加的夹持臂,设置在支撑部的两端,其中每个夹持臂的一端以灵活的方式连接至支撑部。夹持臂可以可移动地连接至支撑部,或可旋转地连接至支撑部,从而夹持臂可以沿夹持方向移动/旋转。可选地,夹具可包括手动操作的调节机构,其配置为在夹持方向上调节夹持臂的共享距离。或者,可以由集成至夹具中或升降系统中的能源驱动该调节机构。
9、夹持臂可以配备有一个或多个支撑板,并在其上增加可能的橡胶层或另一可变形层,以增加支撑板的摩擦力,从而轻轻地夹取物件。支撑板可以以可倾斜的方式连接至夹持臂的可用端。由此,夹具可以相对于物件定位,使得夹持臂可以到达物件周围并抓住它。
10、夹具还包括致动器系统,该致动器系统配置为使夹持臂沿夹持方向移动。至少一个致动器设置在支撑部上并连接到至少一个夹持臂,其中致动器通过集成的能源驱动或通过手动操作的可驱动单元驱动。可驱动单元或能源可以集成至夹具中或集成至升降系统上。优选地,每个夹持臂连接至自己的致动器,其中致动器可以单独控制或同步控制。由此,在致动器的帮助下,夹持臂可以移动至打开位置与关闭位置之间的任意夹持位置。
11、优选地,夹持压力从打开位置逐渐调节到关闭位置,或者反之亦然。由此在夹持臂的移动过程中,夹持压力是连续不断地调节的,而不是像现有技术的夹具实行阶梯式调节。这更好地控制了夹持压力,因为两个压力阶段之间不存在过渡。
12、根据一个实施例,致动器系统配置为在夹持方向上施加基本恒定的压力,以根据夹持臂的位置产生反向压力,其中该恒定的压力和反向压力结合,形成最终夹持压力。
13、在致动器的帮助下,一旦致动器激活,本夹具可以沿夹持方向产生初始压力。此初始压力可以与夹持臂的位置无关,因此初始压力可以用作压力参照系。初始压力可以是相对恒定的压力,或者可替代地,初始压力通过升降系统的控制单元调节。此外,夹具可以产生沿夹持方向反向的第二压力,其中第二压力会抵消一部分初始压力。第二压力可以取决于夹持臂的定位,由此,压力将根据夹持臂的位置而变化。优选地,第二压力低于初始压力,两个压力相结合,产生施加到物件上的压力。
14、就这样,获得了一种根据物件的大小和/或尺寸调节夹持压力的简单的方法。这在搬运相对较小的物件时是优选的,因为这些物件在过高的夹持压力下容易变形。
15、或者,可以应用其他技术来调节夹持压力。例如,用户能够通过用户终端来调节夹持压力,例如通过电脑终端或控制单元上的屏幕来调节。例如,这可以通过用户在菜单中手动选择或输入物件的类型和/或其尺寸,然后控制单元根据这些输入自动地确定夹持压力,然后激活致动器来实现。或者,用户可以通过用户终端手动地输入或调节最大或最小夹持压力。
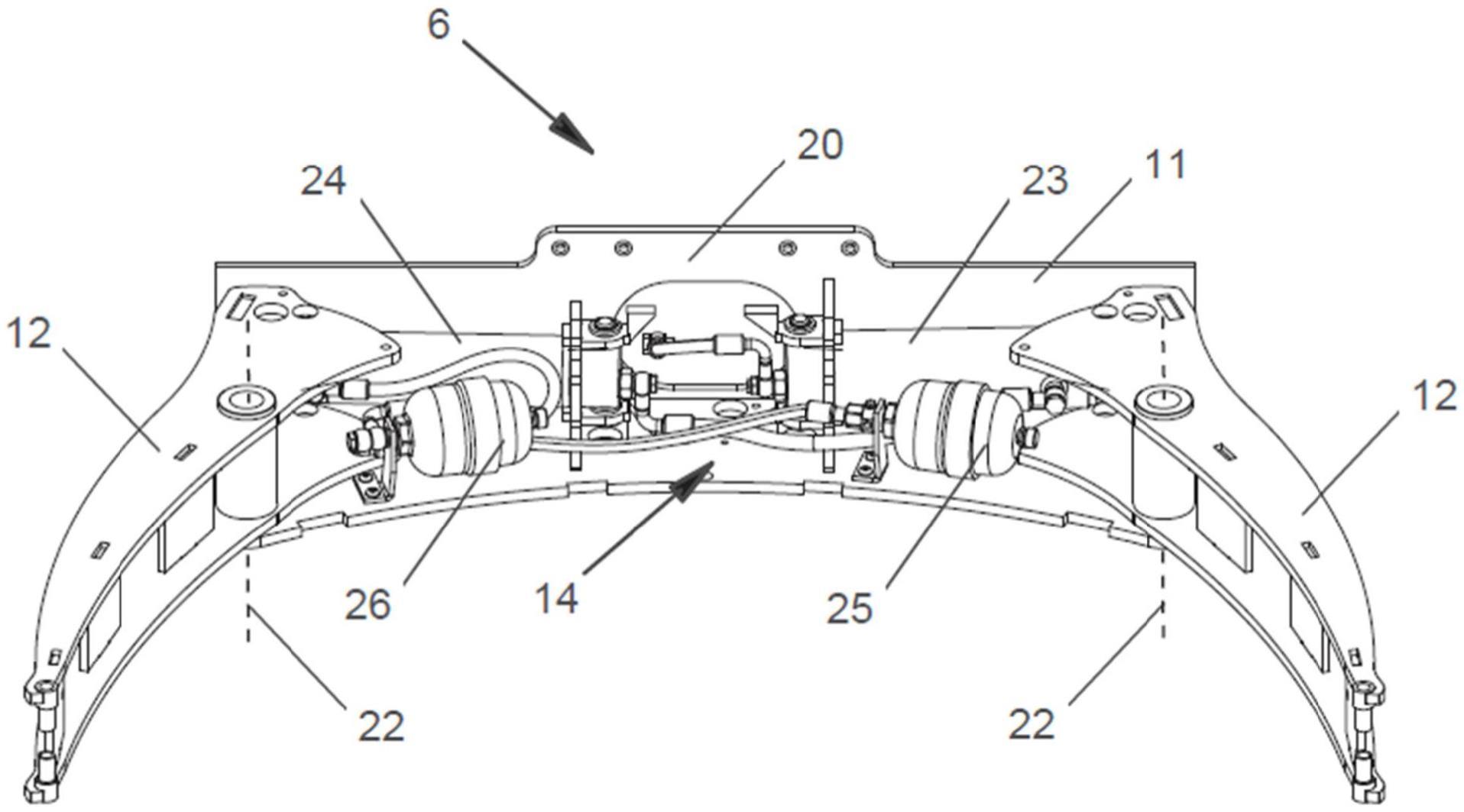
16、根据一个实施例,致动器系统包括主动缸,主动缸连接至从动缸,使得第一介质在主动缸和从动缸之间流动。
17、在一个优选的实施例中,设置在支撑部上的至少两个容器或缸可以用作致动器,其中该两个容器/缸互连,使得第一介质可以在两个容器之间循环。优选地,一个容器将用作主动缸,而第二个容器将用作从动缸。主动缸连接至一个夹持臂,而从动缸连接至第二夹持臂。由此确保两个缸彼此跟随。
18、在此实施例中,容器/缸可以连接至泵单元,泵单元由升降系统内的控制器手动控制或电子控制。当夹持臂激活时,第一介质则可以手动地或自动地导入和导出主动缸。
19、根据一个实施例,致动器系统包括至少一个蓄能器,优选地连接至主动缸和从动缸中的至少一个,其中至少一个蓄能器配置为通过压缩另一介质产生反向压力。
20、致动器系统还包括设置在支撑部上的一个或多个蓄能器。至少一个蓄能器连接至至少一个夹持臂,优选地,每个夹持臂连接至自己的单独的蓄能器。蓄能器包含第二介质,第二介质可以被压缩,由此产生反向压力。蓄能器可以连接至夹持臂,以便在夹持臂朝着夹持位置移动/旋转时压缩第二介质。或者,蓄能器可以连接至夹持臂,以便在夹持臂朝着夹持位置移动/旋转时产生负压。此反压/负压将抵消由致动器/缸所产生的压力。
21、在一个特定的实施例中,蓄能器连接至主动缸或从动缸,使得在夹持臂朝着夹持位置移动时可以将第一介质转移至蓄能器。由此,第二介质被压缩,且第二介质中的压力升高,第一介质中的压力也部分升高。当夹持臂朝着打开位置移动时,第一介质将从蓄能器中转移出来。由此,第二介质中的压力将降低,且第一介质中的压力也部分降低。
22、蓄能器的数量和这些蓄能器中的大多数可以调节,以适应特定的用途,从而能够实现不同的压力曲线。
23、根据一个实施例,第一介质和第二介质中的至少一个为一种液压流体或一种气体。
24、主动缸和从动缸可以是液压容器或气动容器,其中液压流体或气体可以循环。每个缸可包括活塞杆,活塞杆可以连接至各自的夹持臂。活塞头可以将容器分为两个腔室,即第一腔室和第二腔室。主动缸内的第二腔室可以连接至从动缸内的第一腔室,其中第一介质可以在这两个腔室之间循环。
25、从动缸内的第二腔室可以连接至蓄能器内的腔室,其中第一介质可以在这两个腔室之间循环。或者,第三介质可以在这两个腔室之间循环。
26、主动缸内的第一腔室可以连接至液压泵/气动泵,其中第一介质可以在腔室与泵之间循环。或者,第四介质可以在该腔室与该泵之间循环。
27、第三介质和/或第四介质可以不同于第一介质和/或第二介质。这也使其能够实现不同的压力曲线。
28、根据一个实施例,相对于至少一个夹持臂设有至少一个位置传感器,并记录夹持臂的位置,其中至少一个位置传感器的输出电输入至控制单元,控制单元根据夹持臂的位置调节夹持压力。
29、夹持压力也可以通过记录夹持臂的角位置/轴向位置来调节。可以在支撑部上相对于夹持臂设置一个或多个位置传感器。位置传感器可以记录夹持臂的角位移或轴向位移,并将其转化为适合于在控制单元中处理的电信号。位置传感器可以是角位置传感器、线性位置传感器、磁传感器、编码器或其他类型的位置传感器。这使得控制单元能够在运行过程中追踪夹持臂的位置。
30、可以将电信号输入到控制单元,控制单元控制致动器系统的运行。控制单元可以基于输入的信号确定夹持压力控制信号,其中通过激活致动器,控制单元根据夹持压力控制信号调节当前的夹持压力。控制单元可以使用预定的算法或查找表格来确定夹持压力控制信号。
31、可替代地或附加地,可以相对于致动器系统设置一个或多个压力传感器,且该一个或多个压力传感器可以记录实际的夹持压力。位置传感器可以将其转化为适合于在控制单元中处理的电信号。控制单元可以基于测得的夹持压力控制致动器的激活。这使得控制单元能够监控在运行过程中施加的夹持压力。控制单元还可以监控致动器系统内的压力,例如夹持压力,以确保在运行过程中该压力保持在安全限值内。
32、根据一个实施例,当夹持臂处于外夹持位置时,夹持压力最高,当夹持臂处于内夹持位置时,夹持压力最低。
33、夹具可以有利地设计成这样,使得当夹持臂位于最大位置/外夹持位置时,即相当于打开位置时,夹持压力最高。同样地,夹具可以设计成这样,使得当夹持臂位于最小位置/内夹持位置时,即相当于关闭位置时,夹持压力最低。由此,可以轻轻地夹取小的物件和大的物件,因为大的物件通常比小的物件需要更高的夹持压力。
34、优选地,夹持压力可以随着夹持臂朝着关闭位置移动或旋转而不断减小。类似地,夹持压力可以随着夹持臂朝着打开位置移动或旋转而不断增加。可以通过用户界面来监控当前的夹持压力。夹持压力可以使用在控制器中实现的线性函数或非线性函数来确定。
35、本发明与现有技术的区别在于提供了一种移动式升降系统,其包括:
36、-基座,
37、-设置在基座上的升降单元,其中控制单元配置为沿升降方向升起或降低夹具,
38、-连接至升降单元的驱动单元,其中驱动单元配置为驱动升降单元,可能借助内部能源来驱动升降单元,
39、-连接至升降单元的控制单元,其中控制单元配置为至少控制升降单元,
40、-其中夹具如上所述进行配置。
41、由此,获得了具有夹具的升降系统,该升降系统使损坏小物件的风险最小化,而且可以根据不同物件的尺寸和/或大小调节夹持压力。这增加了升降系统的灵活性,同时获得了小心地升降物件的方式。由此,可以根据夹持臂的定位来调节夹持压力。这是通过随着夹持臂从打开位置移动至关闭位置逐渐调节夹持压力来实现的,或者反之亦然。由此,使得可以改进夹持压力控制,因为不存在两个压力阶段之间的过渡。
42、升降系统包括具有轮子、轨道或类似物的基座,由此升降系统可以在地板或类似物上移动。基座配置为支撑升降单元、控制单元和能源。升降系统可包括发动机,该发动机可选择地连接至轮子/轨道,可以通过控制单元来控制。由此,可以手动地移动升降系统或者借助内置发动机移动升降系统。
43、升降系统还包括设置在基座上的升降单元,其中该升降单元配置为沿升降方向升起或降低夹具。升降装置可包括可移动地设置在升降框架内的接合部,其中旋转单元和/或夹具可以安装在接合部上。升降单元由升降系统上的驱动单元驱动。升降单元可包括通过链条连接至接合部的发动机,例如电子发动机,其中发动机由驱动单元驱动。升降单元可包括可选的锁定机构,使得夹具可以锁定到至少一个高度位置。这使得可以手动地或自动地升起/降低夹具。
44、升降系统中的驱动单元可包括集成的能源,例如电池、电池组或燃料电池,其可以用来驱动升降系统中的各种电子元件。能源也可以通过接合部连接至夹具和/或旋转单元,由此夹具和/或旋转单元可以由能源驱动。和用户手动驱动升降单元、夹具和/或旋转装置一样,驱动单元同样可以手动操作,例如使用集成式泵。或者,泵装置可以由升降系统上的控制单元电控制。
45、升降系统上的控制单元包括手柄和连接至控制器的至少一个控制面板,控制器集成到升降系统中。控制面板可包括一个或多个用户界面,用户可以从用户界面上控制升降单元、旋转单元和/或夹具。控制单元可包括可选的遥控器,遥控器有线地或无线地连接至控制器,用户也可以使用控制器来控制升降单元、旋转单元和/或夹持单元。控制单元使得用户可以简单地、安全地操作升降系统,例如通过控制升降单元、旋转单元和/或夹具的速度、锁定位置等等。
46、根据一个实施例,夹具和升降单元之间设有旋转单元,其中旋转单元配置为使夹具绕着转轴沿旋转方向旋转。
47、夹具和升降单元之间设有旋转单元,其使得夹具可以转动并由此使得物件可以转动,即绕旋转轴旋转。旋转单元可包括可旋转机构,可旋转机构可以手动地操作或通过发动机操作,例如通过电驱动的发动机操作。旋转单元可包括可选的锁定机构,使得夹具可以锁定在至少一个给定的径向位置。由此夹具可以旋转并可能锁定在给定的转动位置,使得用户能够以符合人体工程学的正确的工作姿势接触到物件。因此,夹具可以旋转并可能锁定在给定的转动位置,使得物件能够转移至另一系统,例如易于放置物件的可移动升降机。
48、根据一个实施例,升降系统上设有至少一个传感器,且传感器配置为至少直接或间接地测量夹持压力,其中至少一个传感器连接至控制单元。
49、有利地,升降系统可包括一个或多个传感器,其目的在于记录整个升降过程中的不同参数。例如,夹具中可设有第一传感器,第一传感器配置为直接或间接地测量夹持压力。第一传感器可以是压力传感器或力传感器。第一传感器可以连接至控制单元,例如控制器,其中可以从屏幕上读取记录的力/压力。或者,控制单元可包括指示升降物件是否安全的灯。
50、升降系统还可包括第二传感器,第二传感器配置为测量夹具是否受力。另一个传感器可以是称重传感器或应变仪。由此可以记录打开夹具是否安全。
51、夹具还可以配备有一个或多个位置传感器,如上文所述。
- 还没有人留言评论。精彩留言会获得点赞!