用于移梁的电动葫芦控制系统的制作方法
1.本发明涉及电葫芦控制器技术领域,尤其涉及一种用于移梁的电动葫芦控制系统。
背景技术:
2.电动葫芦是一种用来起吊、放下和搬运重物、散料并使重物、散料在短距离内水平、垂直方向上移动的起重、搬运设备,是生产过程中不可缺少的一种起重、搬运设备。电动葫芦的主体悬挂在行走小车上,小车在起重机大梁的工字钢下沿上行走进行就位作业。小车构造简单,是一个锥形转子电机推动,由小减速箱减速后带动行走轮行走。一端的锥形电动机,通过花键套和传动轴将动力传递到另一端的减速机,经过减速的动力,传递到中间的钢丝绳卷筒,由钢丝绳和吊钩进行起重作业,这种电动机有制动功能。
3.目前移梁采用二台电动葫芦,二人各负责一台电动葫芦的控制手柄,二人各负责梁的一端的现场观察和指挥,移梁操手至少需要4-5人进行操作,且存在人工操作配合和时间延误的缺点,造成移梁位置不准,效率不高。
4.现有移梁用的电动葫芦控制器是一种特种设备,一般其控制电路都由手柄、继电器、接触器等元件组成,接线复杂且故障率高、可靠性差;控制手柄在长期使用过程中,触点容易氧化导致易接触不良,经常被摔或砸造成外壳破损,内部带电部分外露造成安全隐患;另外,传统的手柄连接有较长的控制电缆,使用非常不便,电缆在长期移动过程中容易破损和断裂;而且经常有非专业人员随意使用,也带来了不小的安全隐患。虽然有部分电动葫芦使用工业遥控器进行控制,但是其手柄也存在上述的易摔、易破损的安全问题和无法杜绝非专业人员使用的缺陷。
5.中国专利申请号为:202021472418.x,申请日是:2020年07月23日,公开日是:2021年03月19日,专利名称为:电葫芦控制器,该专利公开了一种电葫芦控制器,包括:mcu、隔离式电源模块、马达运行信号处理模块、马达驱动模块以及功率管,所述隔离式电源模块中,220v电源接电源emc滤波器进行滤波处理,电源emc滤波器接整流桥进行整流降压处理,电流经过整流桥分别输出至dc/dc稳压器、隔离式dc/dc转换器;所述马达运行信号处理模块接收并处理马达信号并传输至mcu,所述马达运行信号处理模块与隔离式dc/dc转换器连接,通过隔离式dc/dc转换器对马达信号与电源信号之间进行隔离,避免运行的马达与电源之间的电磁干扰;所述mcu与dc/dc稳压器连接,所述mcu与马达驱动模块连接;所述马达驱动模块与dc/dc稳压器连接,所述马达驱动模块输出信号经过功率管后输出至马达。
6.上述专利文献公开了一种电葫芦控制器,但是该专利对于电葫芦控制智能化程度不高,功能单一,操作不够简便,不能满足目前用于移梁的电动葫芦控制器的实际需要。
技术实现要素:
7.有鉴于此,本发明在于提供一种智能化程度高,功能多样,操控电葫芦简便,大大提高了工作效率和安全性,降低人工成本的一种用于移梁的电动葫芦控制系统。
8.为了实现本发明第一个目的,可以采取以下技术方案:
9.一种用于移梁的电动葫芦控制系统,包括数据采集模块,plc控制模块、开关控制模块、调速模块、定位模块、限位器控制模块、报警模块、监测模块、电源模块;
10.所述数据采集模块,用于采集电葫芦运动信息数据;所述plc控制模块,用于控制分析处理电葫芦信息数据;所述开关控制模块,用于控制开关;所述调速模块,用于对电葫芦运行速度进行调节;所述定位模块,用于对电葫芦运行轨迹定位;所述限位器控制模块,用于限制电葫芦位置;所述报警模块,用于告警;所述监测模块,用于用于监测plc控制模块处理后的信息数据;所述电源模块,用于对plc控制器提供电源;
11.所述数据采集模块将采集的信息传输至该plc控制模块,所述plc控制模块通过开关控制模块控制该调速模块;所述调速模块通过定位模块控制该限位器控制模块,所述限位器控制模块将限位器信息传输至该报警模块;所述plc控制模块控制监测模块。
12.所述数据采集模块包括位置传感器,该位置传感器用于检测电葫芦位置信息。
13.所述数据采集模块包括角度传感器,该角度传感器用于识别电葫芦角度位置信息。
14.所述plc控制模块包括数据分析模块,所述数据分析模块用于分析plc控制模块处理后的信息。
15.所述数据分析模块包括自检模块,该自检模块用于检测校正数据。
16.所述限位器控制模块包括运行行程限位器,该运行行程限位器用于对电葫芦运行位置限位。
17.所述限位器控制模块包括起升高度限位器,该起升高度限位器用于对电葫芦运行高度位置限位。
18.所述监测模块包括无线传输模块,该无线传输模块用于传输信息数据。
19.所述监测模块包括显示模块,该显示模块用于控制显示信息。
20.所述监测模块包括视频监测模块,该视频监测模块用于通过视频信息对电葫芦运行信息进行监测。
21.本发明提供的技术方案的有益效果是:1)本发明通过数据采集模块采集电葫芦运行位置信息,将电葫芦位置信息传输至该plc控制模块,通过plc控制模块控制开关控制模块来对电葫芦运行轨迹进行控制,本发明智能化程度高,安全性和可靠性强,进一步提高了工作效率;2)本发明功能多样,可以对电葫芦运行进行远程监测,使操控电葫芦工作更加便捷,大大节省了人工成本;3)、本发明是电葫芦控制系统的技术升级,适于普遍推广。
附图说明
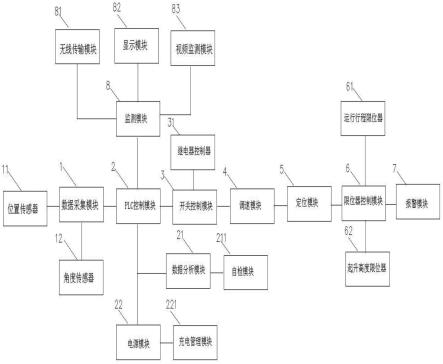
22.图1为本发明实施例用于移梁的电动葫芦控制系统的系统方框图。
具体实施方式
23.下面结合附图及本发明的实施例对发明作进一步详细的说明。
24.实施例1
25.参看图1,该一种用于移梁的电动葫芦控制系统,包括数据采集模块1,plc控制模块2、开关控制模块3、调速模块4、定位模块5、限位器控制模块6、报警模块7、监测模块8、电
源模块22;
26.所述数据采集模块1,用于采集电葫芦运动信息数据;所述plc控制模块2,用于控制分析处理电葫芦信息数据;所述开关控制模块3,用于控制开关;所述调速模块4,用于对电葫芦运行速度进行调节;所述定位模块5,用于对电葫芦运行轨迹定位;所述限位器控制模块6,用于限制电葫芦位置;所述报警模块7,用于告警;所述监测模块8,用于监测plc控制模块2处理后的信息数据;所述电源模块22,用于对plc控制器2提供电源;
27.所述数据采集模块1将采集的信息传输至该plc控制模块2,所述plc控制模块2通过开关控制模块3控制该调速模块4;所述调速模块4通过定位模块5控制该限位器控制模块6,所述限位器控制模块6将限位器信息传输至该报警模块7;所述plc控制模块2控制监测模块8。
28.本实施例,所述数据采集模块1采集电葫芦位置信息通过plc控制模块2进行信息处理分析,该plc控制模块2通过开关控制模块3控制该调速模块4;所述调速模块4通过定位模块5控制限位器控制模块6对电葫芦进行限位,保证了电葫芦工作的安全性;
29.本实施例,优选地,所述开关控制模块3包括继电器控制器31;
30.在本实施例中,所述plc控制模块2通过继电器控制器31控制该调速模块4;
31.本实施例,优选地,所述电源模块22包括充电管理模块221,该充电管理模块221可以对电源模块22进行不间断充电,保证了本发明系统可以长时间工作,进一步提高了工作效率。
32.本实施例中,所述调速模块4可以对电葫芦运行速度进行调节,在移梁过程中进一步保证了安全;所述定位模块5可以对电葫芦运行轨迹定位,该定位模块5将电葫芦运行轨迹信息传输至该限位器控制模块6控制限位器对电葫芦进行定位;如果,所述电葫芦超过限位器控制模块6限制的位置,该限位器控制模块6控制报警器7进行报警。
33.本实施例,优选地,所述plc控制模块2包括数据分析模块21,所述数据分析模块21用于分析plc控制模块2处理后的信息。
34.所述plc控制模块2控制数据分析模块21进一步对数据信息分析处理,保证plc控制模块2处理数据的准确性,进一步保证了电葫芦工作的安全性。
35.本实施例,进一步,优选地,所述数据分析模块21包括自检模块211,该自检模块211用于检测校正数据。
36.本实施,优选地,所述数据分析模块21通过自检模块211对数据进行自我检测并且进行校正,进一步保证了数据分析模块21处理数据的精确度,同时,也保证了该plc控制模块2处理数据的准确性,进一步,保证了电葫芦的运行安全,也提高了工作效率。
37.本实施例,所述plc控制模块2控制监测模块8,所述监测模块8,用于监测plc控制模块2处理后的信息数据,该监测模块8可以监测电葫芦移动位置信息,一旦,电葫芦有超出工作位置的危险,该监测模块8可以通过plc控制模块2控制报警模块7进行报警,进一步提高了电葫芦的工作安全性和可靠性。
38.本实施例中,优选地,所述数据采集模块1包括位置传感器11,该位置传感器11用于检测电葫芦位置信息。
39.通过该位置传感器11检测电葫芦位置信息更加准确,将该电葫芦位置信息传输至plc控制模块2进行处理分析,对于移梁安全工作起到了进一步保障作用。
40.本实施例中,优选地,所述数据采集模块1包括角度传感器12,该角度传感器12用于识别电葫芦角度位置信息。
41.所述角度传感器12可以识别电葫芦位置信息,在移梁过程中,通过控制电葫芦的运行保证移梁工作的安全性;如果,该电葫芦运行超过一定角度位置,通过角度传感器12进行识别,该角度传感器12通过plc控制模块2控制报警模块7进行报警。
42.本实施例,优选地,所述plc控制模块2为型号是kv-nano的芯片。
43.本实施例,优选地,所述限位器控制模块6包括运行行程限位器61,该运行行程限位器61用于对电葫芦运行位置限位。
44.本实施例中,通过该运行行程限位器61对电葫芦运行行程进行限位控制,当电葫芦运行位置超过限位位置,该运行行程限位器61可以通过限位器控制模块6控制报警模块7进行报警,进一步提高了移梁工作可靠性和安全性。
45.本实施例,优选地,所述限位器控制模块6包括起升高度限位器62,该起升高度限位器62用于对电葫芦运行高度位置限位。
46.本实施例中,通过该起升高度限位器62对电葫芦起升高度进行限位控制,当电葫芦起升高度超过限位位置,该起升高度限位器62可以通过限位器控制模块6控制报警模块7进行报警,使移梁工作安全性得到了更可靠的保障。
47.本实施例,进一步,优选地,所述plc控制模块2通过rs232或rs485接口将分析处理后的信息传输至监测模块8。
48.本实施例,更进一步,优选地,所述监测模块8包括无线传输模块81,该无线传输模块81用于传输信息数据。
49.本实施例,所述无线传输模块81可以包括蓝牙传输模块或wifi无线传输模块或4g/5g无线通信网络,所述监测模块8将监测的信息数据通过该无线传输模块81传输至远端监控中心,方便了监控中心对移梁工作的监控;如果将该监控中心通过无线传输模块81传输至该智能手机,监控更加方便,大大降低了人工成本。
50.本实施例,更进一步,优选地,所述监测模块2包括显示模块82,该显示模块82用于控制显示信息。
51.本实施例,所述显示模块82可以控制显示屏等显示装置显示信息,将监控信息数据显示出来大大方便了监控人员对监控数据的监控、分析,也大大降低了监控的人工成本。
52.本实施例,更进一步,优选地,所述plc控制模块2包括视频监测模块83,该视频监测模块83用于通过视频信息对电葫芦运行信息进行监测。
53.本实施例,通过该视频监测模块83可以通过视频图像监测起电葫芦运行状态,对于移梁工作的可靠性和安全性有了进一步保障。
54.本发明plc控制模块2通过限位器控制模块4控制电葫芦位置移动,实现报警功能,大大提高了移梁工作的安全性,进一步提高了工作效率;本发明功能多样,监测移梁工作安全性更加便捷,大大节省了人工成本;本发明是用于移梁的电动葫芦控制系统的升级技术改革,适于普遍推广。
55.以上所述,仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1