矿用防爆单轨吊机车智能起吊装置的制作方法
1.本发明涉及煤矿防爆单轨吊机车技术领域,具体涉及一种矿用防爆单轨吊机车智能起吊装置。
背景技术:
2.矿用防爆单轨吊机车是煤矿的一种重要的辅助运输设备,被广泛应用于煤矿井下人员、物料和设备运输,矿用防爆单轨吊机车一般通过挂设的起吊装置来运输物料或设备,目前矿用防爆单轨吊机车挂设的起吊装置一般为起吊梁,如授权公告号为cn205061401u的中国专利文献公开的单轨吊重型起吊梁,授权公告号为cn211769898u的中国专利文献公开的高效液压油缸起吊梁。目前矿用防爆单轨吊的起吊装置一般都是通过人工手动拉液压葫芦链条进行提升装置物料或设备,现有煤矿单轨吊机车起吊装置存在的主要问题是:其一,起吊装置(起吊梁)对物料的起吊和下放操作完全依赖人工,使得煤矿井下单轨吊机车使用时用人数量较多,人力成本较高;其二,煤矿井下运输巷道环境复杂,视线较差,起吊装置在物料或设备装卸操作过程中工人难免受环境、疲劳等因素影响,使得操控失误造成物料脱落伤人事故时有发生;其三,起吊装置(起吊梁)对物料的起吊和下放操作完全依赖人工,使得物料起吊和下放效率低下,进而影响整个煤矿井下单轨吊机车的运输效率。而当下随着煤矿工业的发展,对煤矿井下运输设备的自动化和安全性的要求越来越高,现有煤矿防爆单轨吊机车的起吊装置显然不能满足煤矿井下运输智能化、安全化以及减人增效的要求,亟需改进。
技术实现要素:
3.本发明的目的是:针对现有技术中存在的问题,提供一种矿用防爆单轨吊机车智能起吊装置,其能够对煤矿井下由矿用防爆单轨吊机车运输的物料和设备的起吊和下放实现自动操作,提高矿用防爆单轨吊机车自动化水平,大幅降员增效,减少安全事故。
4.本发明的技术方案是:本发明的矿用防爆单轨吊机车智能起吊装置,包括具有承载梁和分设于上述承载梁两侧的双链式液压葫芦的单轨吊,用于容纳需运输的物料或设备的集装箱,与上述双链式液压葫芦固定连接用于自动抓取或释放上述集装箱的抓取装置,用于发出吊装指令的单轨吊机车操控单元,其结构特点是:还包括用于采集上述承载梁高度、双链式液压葫芦运行速度以及单轨吊载荷的信息采集组件,用于单轨吊吊装控制的防爆电控箱,用于根据防爆电控箱的指令实现包括双链式液压葫芦提升和下放动作的液压比例电磁阀组;上述抓取装置、单轨吊机车操控单元、信息采集组件以及液压比例电磁阀组分别与防爆电控箱电连接。
5.进一步的方案是:上述信息采集组件包括固定设于上述承载梁的下侧,用于采集承载梁高度信息的本安型物位雷达传感器;在每个双链式液压葫芦具有的链条传输轴上各设置一个,用于检测双链式液压葫芦提升或下放速度的本安型编码器;在承载梁两侧的双链式液压葫芦具有的链端固定座上各设置一个,用于采集两侧双链式液压葫芦载荷信息的
本安型称重传感器。
6.进一步的方案是:上述防爆电控箱固定设于上述承载梁上;防爆电控箱包括隔爆箱体,设于上述隔爆箱体内的cpu模块,与上述cpu模块电连接的放大器组,为防爆电控箱提供工作电源的电源模块;上述放大器组包括若干个功率放大器;上述抓取装置、单轨吊机车操控单元、本安型物位雷达传感器、本安型编码器和本安型称重传感器分别与上述cpu模块电连接。
7.进一步的方案是:上述液压比例电磁阀组包括数量与上述放大器组的功率放大器数量相适应的液压比例电磁阀;各液压比例电磁阀相应与放大器组的一个功率放大器对应电连接;各液压比例电磁阀设于单轨吊上并连接于矿用防爆单轨吊机车具有的液压管路上。
8.本发明具有积极的效果:(1)本发明的矿用防爆单轨吊机车智能起吊装置,能够对煤矿井下由矿用防爆单轨吊机车运输的物料和设备的起吊和下放实现自动操作,提高矿用防爆单轨吊机车自动化水平,大幅降员增效,减少安全事故,从而能够有效解决现有矿用防爆单轨吊机车的起吊装置的起吊和下放操作完全依赖人工所带来的人力成本较高、工作效率低以及易发安全事故的问题。(2)本发明的矿用防爆单轨吊机车智能起吊装置,其通过结构的设计,使其能够在煤矿现有单轨吊机车的起吊装置的基础上经过改造即可,改造简单,成本较低,适用性强,性价比高。
附图说明
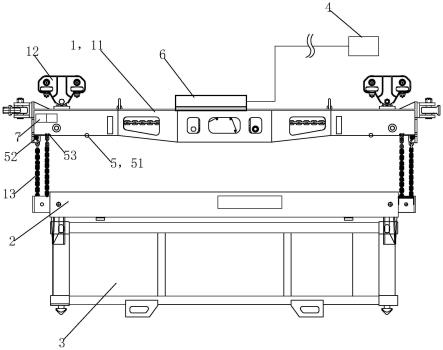
9.图1为本发明的结构示意图;图2为本发明的电路结构示意框图。
10.上述附图中的附图标记如下:单轨吊1,承载梁11,承载小车12,双链式液压葫芦13;抓取装置2;集装箱3;单轨吊机车操控单元4;信息采集组件5,本安型物位雷达传感器51,本安型编码器52,本安型称重传感器53,防爆电控箱6,液压比例电磁阀组7。
具体实施方式
11.下面结合附图和具体实施方式对本发明作进一步详细的说明。
12.(实施例1)见图1和图2,本实施例的矿用防爆单轨吊机车智能起吊装置,其主要由单轨吊1、抓取装置2、集装箱3、单轨吊机车操控单元4、信息采集组件5、防爆电控箱6以及液压比例电磁阀组7组成。
13.单轨吊1包括作为安装和吊运基础的承载梁11,固定设于承载梁11上方用于与煤矿井下巷道上方的单轨吊轨道滚动连接的承载小车12,以及设于承载梁11两侧的双链式液压葫芦13,单轨吊1本身为现有技术,其结构不作详述。
14.抓取装置2和集装箱3均为市购件,优选采用申请号为202210375631.3的中国专利文件公开的矿用辅运机器人自动抓取系统中的抓取装置和集装箱。抓取装置2的两侧分别与单轨吊1两侧的双链式液压葫芦13的下端对应固定连接。使用过程中,抓取装置2能够在防爆电控箱6的控制下自动抓取或释放集装箱3。
15.单轨吊机车操控单元4设于单轨吊机车的驾驶室内,单轨吊机车操控单元4为现有技术,其具体结构不作详述。单轨吊机车操控单元4用于向防爆电控箱6发送起吊装置的起吊和和下放操作指令。
16.信息采集组件5包括本安型物位雷达传感器51、本安型编码器52和本安型称重传感器53。
17.本安型物位雷达传感器51固定设于承载梁11的下侧,本安型物位雷达传感器51至少设置一个以上,本安型物位雷达传感器51用于采集承载梁11的高度信息。本安型物位雷达传感器51为市购件。本安型物位雷达传感器51的采集信息发送给防爆电控箱6。
18.本安型编码器52在承载梁11两侧的双链式液压葫芦13具有的链条传输轴上各设置一个,本安型编码器52用于检测双链式液压葫芦13提升或下放的运行速度,本安型编码器52采用旋转轴编码器,使用时双链式液压葫芦13的链条提升或下放时会带动编码器的轴转动,使得本安型编码器52输出脉冲信号给防爆电控箱6计算双链式液压葫芦13提升或下放的运行速度。本安型编码器52为市购件。本安型编码器52的采集信息发送给防爆电控箱6。
19.本安型称重传感器53在承载梁11两侧的双链式液压葫芦13具有的链端固定座上各设置一个;两个本安型称重传感器53分别用于采集两侧双链式液压葫芦13的载荷信息,两个本安型称重传感器53检测值之和即为单轨吊1的载荷。本安型称重传感器53为市购件。本安型称重传感器53的采集信息发送给防爆电控箱6。
20.防爆电控箱6固定设于单轨吊1的承载梁11上,防爆电控箱6用于根据单轨吊机车操控单元4发出的起吊或下放指令,接收并处理信息采集组件5发送的检测信号并向液压比例电磁阀组7输出相应的操控动作控制信号。
21.防爆电控箱6主要由隔爆箱体、设于隔爆箱体内的cpu模块、与cpu模块电连接的放大器组、为防爆电控箱6提供工作电源的电源模块组成。放大器组包括若干个功率放大器。cpu模块、电源模块以及功率放大器均为市购件。
22.前述的抓取装置2、单轨吊机车操控单元4、信息采集组件5的本安型物位雷达传感器51、本安型编码器52和本安型称重传感器53均分别与防爆电控箱6的cpu模块电连接。
23.液压比例电磁阀组7包括数量与放大器组的功率放大器数量相适应的液压比例电磁阀。各液压比例电磁阀设于单轨吊1上并连接于单轨吊机车的液压管路上。各液压比例电磁阀作为控制执行元件,各液压比例电磁阀相应与放大器组的一个功率放大器对应电连接。
24.本实施例的矿用防爆单轨吊机车智能起吊装置,其工作原理简述如下:矿用防爆单轨吊机车运行过程中,当需要吊运已置入集装箱3内的物料或设备时,单轨吊机车驾驶员或者单轨吊机车自动驾驶系统通过单轨吊机车操控单元4向防爆电控箱6的cpu模块发出吊装指令,防爆电控箱6的cpu模块收到指令后通过放大器组使得液压比例电磁阀组7动作,使得双链式液压葫芦13带动固定于其下方的抓取装置2向下运动,双链式液压葫芦13向下运动过程中,本安型编码器52实时采集液压葫芦链条的运行状态并输出脉冲信号给cpu模块,本安型物位雷达传感器51实时检测抓取装置2与集装箱3之间的相对位移距离并反馈给cpu模块,cpu模块根据检测到的抓取装置2与集装箱3之间距离的不同相应采取不同的运动速度策略,并输出相应的pwm控制信号到液压比例电磁阀组7,抓取装置2的
下放速度由cpu模块根据本安型编码器52的信号实时计算而得。当抓取装置2与集装箱3之间的距离不小于设定阈值(如30cm)时,控制抓取装置2匀速下降;而当抓取装置2与集装箱3之间的距离小于设定阈值(如30cm)时,控制抓取装置2减速下降;当抓取装置2与集装箱3对接锁定后,抓取装置2反馈信号给cpu模块,cpu模块从下放控制转为起吊控制,开始起吊时,本安型称重传感器53检测集装箱3及置于集装箱3内的物料或设备的总重量进行检测,并将检测信号反馈给cpu模块,当检测值大于总重量的设计阈值时,cpu模块控制起吊提升停止,直至检测值小于阈值再恢复起吊动作,以确保安全;起吊提升过程中当本安型物位雷达传感器51检测到抓取装置2与单轨吊1的承载梁11的下缘之间的距离小于预设的距离阈值(如30cm)时,cpu模块控制抓取装置2减速提升,当抓取装置2与单轨吊1的承载梁11的下缘之间的距离达到设定的上升限位阈值时,cpu模块控制起吊动作停止,并发送起吊完毕的信号给驾驶室内的单轨吊机车操控单元4,完成起吊过程。矿用防爆单轨吊机车运行至需要卸货的位置时,单轨吊机车操控单元4向防爆电控箱6的cpu模块发出带载荷下放指令,下放过程控制与空载下放基本相同,当将内置有物料或设备的集装箱3下放到位时,cpu模块发出解锁指令,抓取装置2与集装箱3脱离,完成一次集装箱3的自动吊运。
25.以上实施例是对本发明的具体实施方式的说明,而非对本发明的限制,有关技术领域的技术人员在不脱离本发明的精神和范围的情况下,还可以做出各种变换和变化而得到相对应的等同的技术方案,因此所有等同的技术方案均应该归入本发明的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1