一种基于智能视觉识别机器人的固定胶带全自动粘贴机的制作方法
1.本发明涉及胶带粘贴技术领域,尤指一种基于智能视觉识别机器人的固定胶带全自动粘贴机。
背景技术:
2.目前,在工业生产过程中,很多地方需要用到胶带贴覆,特别是电子产品被大量需求,而传统的胶带贴覆均靠工人手工操作,耗费大量人力资源,如产品较大,工人可能还需要工具辅助才能完成产品中间的胶带贴覆,由于人工贴覆没有相对的定位基准,使用人工进行胶带贴覆容易导致粘贴位置的不精准,难以使胶带每一次贴覆都在固定的位置,产品贴覆完成后,缺少完好与否判定,因此容易出错,产品一致性差、速度慢、精确度低、重复工作量大,且替换新作业人员时,都需要进行重新教学胶带粘覆位置,而且,人工作业会更容易造成产品表面的脏污;因此,企业现有的人工手动胶带贴覆的生产模式,已经不能满足企业的生产速度和对生产质量的要求。
技术实现要素:
3.为解决上述问题,本发明旨在公开一种胶带粘贴技术领域,尤指一种基于智能视觉识别机器人的固定胶带全自动粘贴机。
4.为实现上述目的,本发明采用的技术方案是:一种基于智能视觉识别机器人的固定胶带全自动粘贴机,包括贴胶工作台、机器人手臂、贴胶机本体和控制机构,所述贴胶机本体包括主机架,主机架上依次设置有:胶带安装轮、补料检测机构、送料机构、胶带夹紧机构、预压机构、胶带熨平机构、胶带裁断机构和视觉判断机构;其中,所述胶带安装轮与所述主机架活动连接,用于对胶带进行快速安装;胶带夹紧机构设置在胶带安装轮前方,用以拉伸及夹紧胶带;在所述胶带安装轮与胶带夹紧机构之间设置所述送料机构;胶带夹紧机构与送料机构之间通过连接装置相连;所述预压机构安装在主机架中部在垂直方向上运动,与胶带夹紧机构相邻设置;所述胶带熨平机构通过熨平轮压紧气缸安装在主机架中部在垂直方向上运动,与预压机构相邻设置,在胶带熨平机构上设置至少一个压缩弹簧,在胶带熨平机构与贴胶工作台接触时,可以调节曲面/具有凹槽的工作面的表面压力;所述胶带裁断机构通过裁断机构提升气缸和裁断机构平移气缸垂直于胶带延伸方向设置在主机架下部;所述视觉判断机构设置在胶带裁断机构后方;所述补料检测机构安装在胶带安装轮中下方与主机架相连;所述主机架顶部设置有安装法兰与所述机器人手臂耦合连接,以便机器人手臂对贴胶机本体进行升降运动以及平移运动;所述控制机构与所述补料检测机构、送料机构、胶带夹紧机构、预压机构、胶带熨平机构、胶带裁断机构和视觉判断机构电性连接。
5.优选地,所述主机架呈中空的回字型结构,所述控制机构贯穿主机架中部与所述
补料检测机构、送料机构、胶带夹紧机构、预压机构、胶带熨平机构、胶带裁断机构和视觉判断机构电性连接。
6.优选地,所述预压机构包括胶带预压轮、导向轨道和预压气缸,所述胶带预压轮通过预压气缸与导向轨道连接,安装在主机架中部在垂直方向上运动。
7.优选地,所述胶带熨平机构还包括胶带熨平轮,胶带熨平轮通过熨平轮压紧气缸安装在主机架中部在垂直方向上运动。
8.优选地,所述胶带裁断机构包括裁剪刀、裁断气缸、裁断机构提升气缸和裁断机构平移气缸,裁剪刀通过裁断气缸进行裁断动作,并通过裁断机构提升气缸和裁断机构平移气缸的相互配合和传动,裁断胶带。
9.优选地,所述视觉判断机构包括至少一个用于拍摄产品表面的工业相机、用于存储拍摄的产品表面照片的存储模块、用于对比分析拍摄的产品表面照片的对比分析模块和plc控制模块。
10.优选地,所述视觉判断机构还包括频闪光源、用于控制所述频闪光源的闪光频率的光源控制器。
11.优选地,所述补料检测机构为激光传感器。
12.本发明的有益效果体现在:本发明设计了一种基于智能视觉识别机器人的固定胶带全自动粘贴机,贴胶机本体可搭配不同臂展的机器人手臂使用,通过胶带安装轮、补料检测机构、送料机构、胶带夹紧机构、预压机构、胶带熨平机构、胶带裁断机构和视觉判断机构的相互配合和传动,实现不同大小的产品的全方位胶带粘贴覆盖,并且精确定位粘贴位置,避免因为粘贴位置错误带来的不良以及返工,在胶带熨平机构上设置有至少一个压缩弹簧,可以使胶带熨平机构在曲面和/或具有凹槽的工作面进行胶带贴覆工作;通过视觉判断机构快速判定产品的优良,避免不良品流入下一道工序;利用本全自动粘贴机替代人工进行贴覆,有限地避免反复的作业教学以及减少用于确认胶带粘贴位置的时间成本,减少人工作业过程中由于对产品造成的污染,减少后期的清理成本,本发明大大提高自动化程度,提高效率,可产生较大的社会经济效益,拥有较为庞大的市场需求。
附图说明
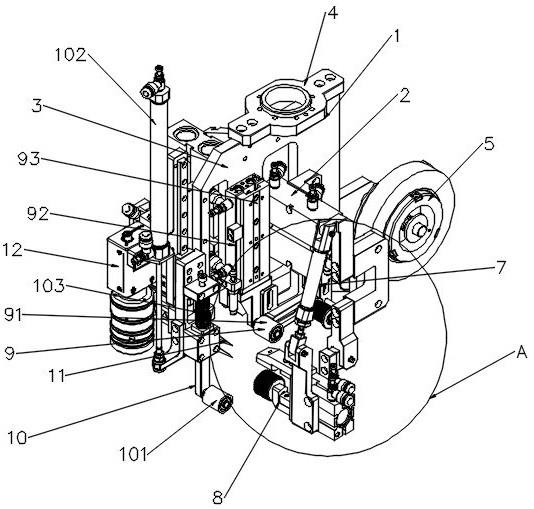
13.图1是本发明一种基于智能视觉识别机器人的固定胶带全自动粘贴机的整体结构图。
14.图2是图1中a部分的放大图。
15.图3是本发明一种基于智能视觉识别机器人的固定胶带全自动粘贴机的背面结构图。
16.图4是本发明一种基于智能视觉识别机器人的固定胶带全自动粘贴机正视图。
17.图5是本发明一种基于智能视觉识别机器人的固定胶带全自动粘贴机右视图。
18.图6是本发明一种基于智能视觉识别机器人的固定胶带全自动粘贴机俯视图。
19.附图标注说明:1-贴胶机本体,2-控制机构,3-主机架,4-安装法兰,5-胶带安装轮,6-补料检测机构,7-送料机构,8-胶带夹紧机构,9-预压机构,10-胶带熨平机构,11-胶带裁断机构,12-视觉判断机构,71-u型支座,72-送料连杆气缸,73-送料平移气缸,74-上连接臂,75-下连接
臂,81-胶带夹紧轮,82-转动气缸,83-左侧支撑板,84-右侧支撑板,85-主夹臂,86-从夹轮,87-牵引装置,88-传动轮,91-胶带预压轮,92-导向轨道,93-预压气缸,101-胶带熨平轮,102-熨平轮压紧气缸,103-压缩弹簧,111-裁剪刀,112-裁断机构提升气缸,113-裁断机构平移气缸,114-裁断气缸。
具体实施方式
20.下面结合附图详细说明本发明的具体实施方式:本发明提出一种基于智能视觉识别机器人的固定胶带全自动粘贴机,包括贴胶工作台、机器人手臂、贴胶机本体1和控制机构2,所述贴胶机本体1包括主机架3,主机架3上依次设置有:胶带安装轮5、补料检测机构6、送料机构7、胶带夹紧机构8、预压机构9、胶带熨平机构10、胶带裁断机构11和视觉判断机构12;主机架3顶部设置有安装法兰4与所述机器人手臂耦合连接,以便机器人手臂对贴胶机本体1进行升降运动以及平移运动,所述安装法兰4可以搭配不同臂展的机器人手臂使用,通过胶带安装轮5、补料检测机构6、送料机构7、胶带夹紧机构8、预压机构9、胶带熨平机构10、胶带裁断机构11和视觉判断机构12的相互配合和传动,实现不同大小的产品的全方位胶带粘贴覆盖,并且精确定位粘贴位置,避免因为粘贴位置错误带来的不良以及返工;其中,胶带安装轮5与所述主机架3活动连接,用于对胶带进行快速安装;胶带夹紧机构8设置在胶带安装轮5前方,用以拉伸及夹紧胶带;在所述胶带安装轮5与胶带夹紧机构8之间设置所述送料机构7;胶带夹紧机构8与送料机构7之间通过连接装置相连;本实施例提供一种胶带夹紧机构8的具体结构,包括胶带夹紧轮81,胶带夹紧轮81包括主夹臂85和从夹轮86,主夹臂85和从夹轮86上下设置并通过牵引装置87相连接,在牵引装置87的作用下,减小主夹臂85和从夹轮86之间的相对间隙,以夹紧胶带;其中从夹轮86可转动式与一转动气缸82相连,在转动气缸的作用下,从夹轮86可顺时针或逆时针转动,胶带夹紧机构8还包括至少一个与从夹轮86前后设置的传动轮88,以更便于传送胶带;从夹轮86和/或传动轮88的外表面均设置有橡胶层,以起到增大与胶带之间的摩擦的作用;主夹臂85与胶带/从夹轮86接触的一面设置有用于缓冲的海绵层,以便在一定范围内调整不同厚度的胶带夹紧的力度,可弹性地容纳不同厚度的新胶带的输入铺设与旧胶带的输出粘贴,同时保证牵引装置87的牵引力的稳定输出,以实现不同大小的电子产品的全方位胶带粘贴覆盖;所述送料机构7包括送料连杆气缸72和送料平移气缸73,在送料连杆气缸72和送料平移气缸73的传动作用下,可以精确带动胶带夹紧机构8到设定的粘贴位置;具体地,所述连接装置包括u型支座71、设置在u型支座71的开口处向上延伸的上连接臂74以及向下延伸的下连接臂75、分别设置在胶带夹紧机构8两侧的左侧支撑板83以及右侧支撑板84;其中,u型支座71开口朝向与胶带安装轮5相反的一侧,固定连接在控制机构2的外壳上;u型支座71的背面与送料平移气缸73相连,上连接臂74与送料连杆气缸72相连,胶带夹紧机构8通过左侧支撑板和右侧支撑板与u型支座71以及送料连杆气缸72相连;所述上连接臂74、送料连杆气缸72、左侧支撑板、胶带夹紧机构8、右侧支撑板、下连接臂75和u型支座依次连接,形成一个可变形的类三角形区域;
具体地,所述送料连杆气缸72的上臂部与上连接臂74的上臂部铰接,其下臂部与左侧支撑板83的顶部铰接;所述下连接臂75的下臂部与右侧支撑板84铰接;所述补料检测机构6安装在胶带安装轮5中下方与主机架3相连;本实施例中,补料检测机构6为激光传感器,通过激光感应器,对胶带安装轮5上的胶带进行感应,检测到缺料后,及时亮提示灯提醒工作人员补料;所述预压机构9安装在主机架3中部在垂直方向上运动,与胶带夹紧机构8相邻设置;所述预压机构9包括胶带预压轮91、导向轨道92和预压气缸93,胶带预压轮91通过预压气缸93与导向轨道92连接,安装在主机架3中部在垂直方向上运动,将胶带压贴在产品表面;所述胶带熨平机构10包括胶带熨平轮101,胶带熨平轮101通过熨平轮压紧气缸102安装在主机架3中部在垂直方向上运动,与预压机构9相邻设置,在胶带熨平机构10上设置至少一个压缩弹簧103,在胶带熨平机构10与贴胶工作台接触时,可以调节曲面/具有凹槽的工作面的表面压力,可以使胶带熨平机构10在曲面和/或具有凹槽的工作面进行胶带贴覆工作;所述胶带裁断机构11包括裁剪刀111、裁断气缸114、裁断机构提升气缸112和裁断机构平移气缸113,裁剪刀111通过裁断气缸114进行裁断动作,裁剪刀111通过裁断机构提升气缸112和裁断机构平移气缸113垂直于胶带延伸方向设置在主机架3下部,通过裁断机构提升气缸112和裁断机构平移气缸113的相互配合和传动,裁断胶带;所述视觉判断机构12设置在胶带裁断机构11后方,本施例中,视觉判断机构12包括至少一个用于拍摄产品表面的工业相机、用于存储拍摄的产品表面照片的存储模块、用于对比分析拍摄的产品表面照片的对比分析模块和plc控制模块,还包括频闪光源以及用于控制所述频闪光源的闪光频率的光源控制器。
21.所述控制机构2与所述补料检测机构6、送料机构7、胶带夹紧机构8、预压机构9、胶带熨平机构10、胶带裁断机构11和视觉判断机构12电性连接;本实施例中,所述主机架3呈中空的回字型结构,所述控制机构2贯穿主机架3中部与所述补料检测机构6、送料机构7、胶带夹紧机构8、预压机构9、胶带熨平机构10、胶带裁断机构11和视觉判断机构12电性连接。
22.本发明提出一种基于智能视觉识别机器人的固定胶带全自动粘贴机,工作时,机器人手臂下压至作业高度,控制机构2控制预压机构9启动并下降至贴胶工作台,将胶带压贴至产品表面,随后,胶带夹紧机构8启动,胶带脱离胶带夹紧轮81,同时机器人手臂往胶带前端延伸方向移动,胶带完全脱离胶带夹紧轮81,预压机构9完成胶带前段粘贴工作;胶带夹紧机构8通过送料机构7的送料平移气缸73平移至外侧,胶带熨平机构10启动,同时预压机构9上升收回;机器人手臂带动胶带熨平机构10往粘贴方向(胶带安装轮5方向)移动,胶带熨平机构10通过带压缩弹簧103的胶带熨平轮101紧贴胶带至设定的粘贴长度;随后,胶带夹紧机构8启动,胶带夹紧轮81再次夹紧胶带,胶带夹紧机构8通过送料机构7的传动平移到外侧,胶带裁断机构11启动,裁剪刀111前伸对胶带进行裁剪,胶带裁剪后,机器人手臂继续带动贴胶机本体1往粘贴方向(胶带安装轮5方向)移动一段距离,以便胶带熨平机构10对裁断后的胶带末端进行进一步粘贴,随后,熨平机构收回,送料连杆气缸72、送料平移气缸73和转动气缸82传动,带动胶带夹紧轮81转动,将胶带拉伸至夹紧位置,机器人手臂上升至
原始设定高度,视觉判断机构12检测判定产品ok/ng;本实施例中,视觉判断机构12工作,对粘贴好胶带的产品进行至少一次拍摄,并将拍摄所得图像的各参数与系统预存储的各参数进行比对,当得到的图像参数在允许的范围内则判断结果为合格,当得到的图像参数在允许的范围外或无法识别则判断结果为不合格;通过视觉判断机构12快速判定产品的优良,避免不良品流入下一道工序;本实施例利用本全自动粘贴机替代人工进行贴覆,有限地避免反复的作业教学以及减少用于确认胶带粘贴位置的时间成本,减少人工作业过程中由于对产品造成的污染,减少后期的清理成本,本发明大大提高自动化程度,提高效率,可产生较大的社会经济效益,拥有较为庞大的市场需求。
23.以上所述,仅是本发明的较佳实施例,并非对本发明的技术范围作任何限制,本行业的技术人员,在本技术方案的启迪下,可以做出一些变形与修改,凡是依据本发明的技术实质对以上的实施例所作的任何修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1