一种可调式吊装工装的制作方法
1.本实用新型涉及吊装设备技术领域,具体为一种可调式吊装工装。
背景技术:
2.目前建造场地在进行高处吊装作业时,存在有部分管线设备不能直接吊装到达指定位置,易出现摆动吊装不稳定等问题,需进行穿管作业,需要多次在高空临边倒扣作业,且穿管作业中时常发生吊钩、钢丝绳与模块相互摩擦,存在一定的安全隐患,作业效率低,为此提出了一种可调式吊装工装。
技术实现要素:
3.本实用新型的目的在于提供一种可调式吊装工装,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种可调式吊装工装,包括杠杆臂,所述杠杆臂的一端固定连接有方向杆,所述杠杆臂外壁滑动连接有调整臂,所述调整臂的顶端固定连接有主吊耳,杠杆臂的顶部的一端固定连接有主吊耳,所述调整臂顶部的一端安装有减震块,所述调整臂顶部的另一端安装有直流电源及遥控接收器盒,所述杠杆臂的外壁安装有直流遥控电磁复位开关,所述调整臂内部的两端分别安装有直线轴承,所述调整臂底部的两端分别固定连接有捆绑吊耳,所述杠杆臂的顶端开设有导轨槽。
5.优选的,所述直线轴承的内部和杠杆臂的外壁相接触。
6.优选的,调整臂通过导轨槽和杠杆臂的外壁滑动连接。
7.优选的,所述杠杆臂采用强度高的材料制成。
8.优选的,所述主吊耳和捆绑吊耳采用圆环结构。
9.优选的,直流电源及遥控接收器盒和直流遥控电磁复位开关电性连接。
10.本实用新型设计一种可调式吊装工装,通过杠杆臂、调整臂、主吊耳、捆绑吊耳、直线轴承、导轨槽、减震块、直流电源及遥控接收器盒、直流遥控电磁复位开关、方向杆等结构组合,平稳控制吊装货物运送方向,避免吊钩、钢丝绳与模块摩擦碰撞,实现高处吊装作业的远距离调节控制,保障了建造场地高处吊装作业的安全和效率,更好地满足现场工程的需求。
11.本实用新型提供一种可调式吊装工装,通过该结构的设置,使得该工装可通过方向杆平稳控制吊装运送方向,实现高处吊装作业的远距离控制,避免吊钩、钢丝绳与模块摩擦,提高作业效率,减少人工投入,降低成本,保障高处吊装作业安全;通过结构优化设计和强度校核计算;该专利经过强度校核,满足场地施工要求,提高施工的安全性。
附图说明
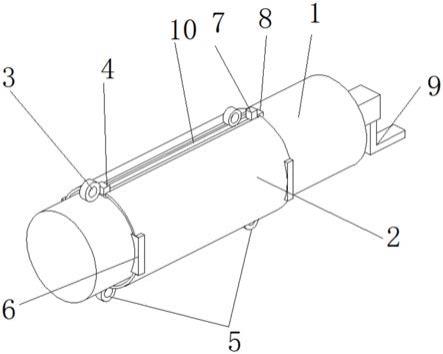
12.图1为本实用新型的等轴测图;
13.图2为本实用新型的主视图;
14.图3为本实用新型的剖视图。
15.图中:1、杠杆臂;2、调整臂;3、主吊耳;4、减震块;5、捆绑吊耳;6、直线轴承;7、直流电源及遥控接收器盒;8、直流遥控电磁复位开关;9、方向杆;10、导轨槽。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.需要说明的是,在本实用新型的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件所必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
18.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不按照实际的比例关系绘制,例如某些层的厚度或宽度可以相对于其他层有所夸大。
19.应注意的是,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图的说明中将不需要再对其进行进一步的具体讨论和描述。
20.如图1-图3所示,本实用新型提供一种技术方案:一种可调式吊装工装,包括杠杆臂1,杠杆臂1的一端固定连接有方向杆9,杠杆臂1外壁滑动连接有调整臂2,调整臂2的顶端固定连接有主吊耳3,杠杆臂1的顶部的一端固定连接有主吊耳3,调整臂2顶部的一端安装有减震块4,调整臂2顶部的另一端安装有直流电源及遥控接收器盒7,杠杆臂1的外壁安装有直流遥控电磁复位开关8,调整臂2内部的两端分别安装有直线轴承6,调整臂2底部的两端分别固定连接有捆绑吊耳5,杠杆臂1的顶端开设有导轨槽10。
21.直线轴承6的内部和杠杆臂1的外壁相接触。
22.调整臂2通过导轨槽10和杠杆臂1的外壁滑动连接。
23.杠杆臂1采用强度高的材料制成。
24.主吊耳3和捆绑吊耳5采用圆环结构。
25.直流电源及遥控接收器盒7和直流遥控电磁复位开关8电性连接。
26.具体操作步骤如下:
27.s1:根据货物安装调整方向杆9确定货物的吊装方向位置;
28.s2:根据杠杆臂的方向利用电磁复位开关控制调整臂2运输货物吊装滑动;
29.s3:待货物吊装完毕恢复调整臂2位置,利用电磁复位开关锁定返回到起始位置;
30.s4:按照施工场地工程和吊装作业需求,选用合适吊装工装和吊装方式吊装货物到指定位置。
31.杠杆臂1结构稳固,经强度校核计算满足设计要求,杠杆臂1对吊装工装整体起支撑稳固作用,保证装置在吊装过程中的稳定性;调整臂2可在杠杆臂1上一定范围内滑动,实现吊装货物的调整和传送,保证吊装货物到达需求位置;直线轴承6,直线轴承6安装在调整
臂2内侧,适用于调整臂2的滑动和吊装货物的传送运输;主吊耳3用于悬挂吊钩和调整调整臂2的滑动方向;捆绑吊耳5固定在调整臂2底部的两端,用于吊装和固定吊物,保障吊装作业的安全;导轨槽10方便于调整臂2在杠杆臂1上的滑动,减震块4可实现在吊装滑动过程中的减震作用,保障吊装作业的安全;通过电磁复位开关和遥控器远程控制,实现吊装作业自动控制,安全性和快捷性大大提高,提高施工效率;方向杆9能够控制调整杠杆臂1的方向,根据作业需求调整吊装方向,避免吊钩和钢丝绳的摩擦产出碰撞风险,保障吊装作业的安全。
32.通过杠杆臂1、调整臂2、主吊耳3、捆绑吊耳5、直线轴承6、导轨槽10、减震块4、直流电源及遥控接收器盒7、直流遥控电磁复位开关8、方向杆9等结构组合,平稳控制吊装货物运送方向,避免吊钩、钢丝绳与模块摩擦碰撞,实现高处吊装作业的远距离调节控制,保障了建造场地高处吊装作业的安全和效率,更好地满足现场工程的需求,可调式吊装工装结构可通过方向杆9平稳控制吊装运送方向,实现高处吊装作业的远距离控制,避免吊钩、钢丝绳与模块摩擦,提高作业效率,减少人工投入,降低成本,保障高处吊装作业安全;通过结构优化设计和强度校核计算;该专利经过强度校核,满足场地施工要求,提高施工的安全性。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种可调式吊装工装,包括杠杆臂(1),其特征在于:所述杠杆臂(1)的一端固定连接有方向杆(9),所述杠杆臂(1)外壁滑动连接有调整臂(2),所述调整臂(2)的顶端固定连接有主吊耳(3),杠杆臂(1)的顶部的一端固定连接有主吊耳(3),所述调整臂(2)顶部的一端安装有减震块(4),所述调整臂(2)顶部的另一端安装有直流电源及遥控接收器盒(7),所述杠杆臂(1)的外壁安装有直流遥控电磁复位开关(8),所述调整臂(2)内部的两端分别安装有直线轴承(6),所述调整臂(2)底部的两端分别固定连接有捆绑吊耳(5),所述杠杆臂(1)的顶端开设有导轨槽(10)。2.根据权利要求1所述的一种可调式吊装工装,其特征在于:所述直线轴承(6)的内部和杠杆臂(1)的外壁相接触。3.根据权利要求1所述的一种可调式吊装工装,其特征在于:调整臂(2)通过导轨槽(10)和杠杆臂(1)的外壁滑动连接。4.根据权利要求1所述的一种可调式吊装工装,其特征在于:所述杠杆臂(1)采用强度高的材料制成。5.根据权利要求1所述的一种可调式吊装工装,其特征在于:所述主吊耳(3)和捆绑吊耳(5)采用圆环结构。6.根据权利要求1所述的一种可调式吊装工装,其特征在于:直流电源及遥控接收器盒(7)和直流遥控电磁复位开关(8)电性连接。
技术总结
本实用新型公开了一种可调式吊装工装,涉及吊装设备技术领域。包括杠杆臂,所述杠杆臂的一端固定连接有方向杆,所述杠杆臂外壁滑动连接有调整臂,所述调整臂的顶端固定连接有主吊耳,杠杆臂的顶部的一端固定连接有主吊耳,所述调整臂顶部的一端安装有减震块,所述调整臂顶部的另一端安装有直流电源及遥控接收器盒。本实用新型通过杠杆臂、调整臂、主吊耳、捆绑吊耳、直线轴承、导轨槽、减震块、直流电源及遥控接收器盒、直流遥控电磁复位开关、方向杆等结构组合,平稳控制吊装货物运送方向,避免吊钩、钢丝绳与模块摩擦碰撞,实现高处吊装作业的远距离调节控制,保障了建造场地高处吊装作业的安全和效率,更好地满足现场工程的需求。求。求。
技术研发人员:李仁斐 常宝琛 谢迎 刘森 杨全 徐启建 李信锋 刘伟 王申 鲁华雨 唐正勇
受保护的技术使用者:海洋石油工程(青岛)有限公司
技术研发日:2022.09.13
技术公布日:2023/2/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1