一种基于图像识别的检测皮带撕裂情况的方法及系统与流程
本发明涉及图像识别,特别是一种基于图像识别的检测皮带撕裂情况的方法及系统。
背景技术:
1、皮带运输机作为诸多领域企业运输物料的重要运输设备,在生产中占据重要的地位,该领域包括港口、冶金、矿山、化工、石油、电厂以及建材等,而传输皮带主要材料为橡胶以及纤维芯胶带、普通帆布芯胶带或钢绳芯胶带等不同材质芯绳,而传输皮带在不断运行过程中,容易出现撕裂的情况。
2、当皮带在运输过程中发生断裂时,运输的材料在掉落时有可能会造成物料倾洒、损毁减速器和电动机等设备。而皮带由于价格的原因,并不能在皮带出现一丝撕裂的情况时就对皮带进行更换。再者断裂变化是实时发生的,采用定时检测的方式无法有效预测出皮带是何时需要进行更换,只有实时的检测才能对皮带的撕裂情况进行实时的检测。但是在运输的过程中位于运输机上方的皮带通常装载着货物,影响工人对皮带的观察,造成最终确定皮带撕裂程度的准确性较低。位于运输机上方的皮带由于位置关系,工人难以在下方对皮带进行检测,故一种能够自动识别出皮带撕裂情况的方法亟待出现。
技术实现思路
1、针对上述缺陷,本发明的目的在于提出一种基于图像识别的检测皮带撕裂情况的方法及系统,实现皮带撕裂的自动识别以及撕裂长度计算,解决人工难以观察运行中皮带撕裂的问题。
2、为达此目的,本发明采用以下技术方案:一种基于图像识别的检测皮带撕裂情况的方法,包括以下步骤:
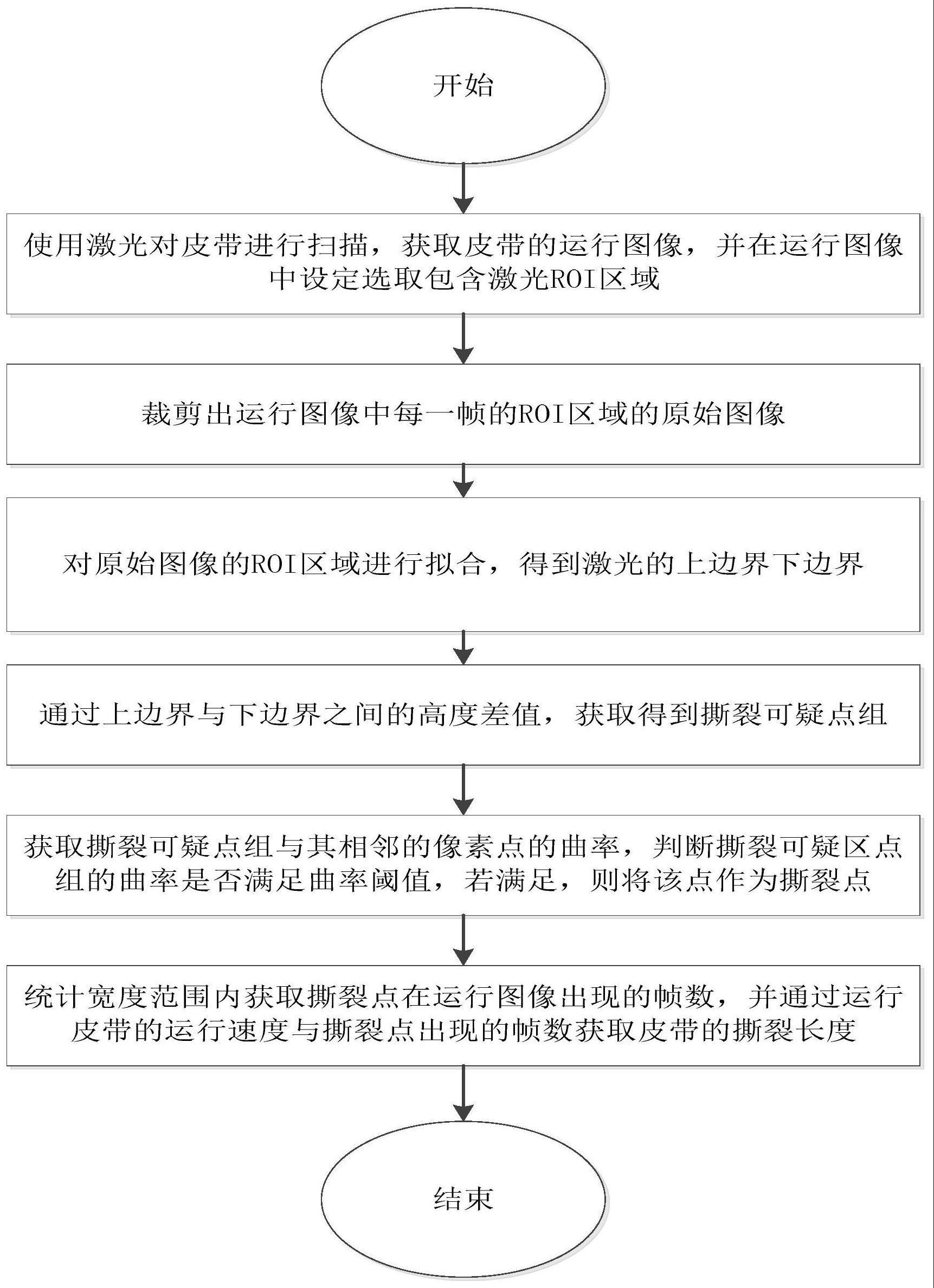
3、步骤s1:使用激光对皮带进行扫描,获取皮带的运行图像,并在运行图像中设定选取包含激光的roi区域;
4、步骤s2:裁剪出运行图像中每一帧的roi区域的原始图像;
5、步骤s3:对原始图像的每一帧的roi区域进行拟合,得到激光的上边界下边界;
6、步骤s4:通过上边界与下边界之间的高度差值,获取得到撕裂可疑点组;
7、步骤s5:获取撕裂可疑点组与其相邻的像素点的曲率,判断撕裂可疑区点组的曲率是否满足曲率阈值,若满足,则将该点作为撕裂点;
8、步骤s6:统计宽度范围内获取撕裂点在运行图像出现的次数,并通过运行皮带的运行速度与撕裂点出现的帧数获取皮带的撕裂长度。
9、优选的,所述步骤s3的具体步骤如下:
10、步骤s1:使用cv2.medianblur函数对原始图像进行中值滤波;
11、步骤s2:对滤波后的原始图像进行二值化处理,得到原始图像中的激光大致轮廓;
12、步骤a3:对激光大致轮廓进行区域生长或连通区域处理,获取最大的激光区域;
13、步骤s4:对最大的激光区域进行边缘检测,获取激光轮廓;
14、步骤s5:对激光轮廓使用曲线拟合算法,得到激光的上边界与下边界。
15、优选的,所述步骤s4的具体步骤如下:
16、步骤s41:对所述上边界与下边界进行遍历,将遍历后上边界与下边界的像素点坐标分别存储在两个坐标表内;
17、步骤s42:对两个坐标表中同一横坐标的两个像素点作为一组判断点组;
18、步骤s43:获取判断点组中两个像素点的纵坐标差值,若两个像素点之间的纵坐标差值大于差值阈值,则将该判断点组设为撕裂可疑点组。
19、优选的,所述步骤s5的具体步骤如下:
20、步骤s51:分别获取撕裂可疑点组中两个像素点左右两侧的相邻像素点,并分别获取两个相邻像素点到可疑点组中像素点的距离ta和距离tb;
21、步骤s52:构建一个二次函数模型:y=a0+a1x+a2x2;
22、使用距离ta和距离tb构建出第一矩阵,其中第一矩阵如下所示:
23、
24、步骤s53:通过所述第一矩阵与一个二次函数模型共同算求出系数向量a0、a1与a2的具体数值;
25、步骤s54:通过系数向量a1与a2获取该可疑点组的像素点的曲率,其中曲率的获取公式如下:其中b1=a1+2a2x2,b2=2a2,其中x2为其中一相邻像素点的横坐标值;
26、步骤s55:判断可疑点组中任一像素点的曲率是否大于曲率阈值,若大于,则将该可疑区点组标记为撕裂点。
27、优选的,步骤s6的具体步骤如下:
28、当当前帧首次出现撕裂点后,对撕裂点进行标记,并设置标记后的撕裂点出现次数为1;
29、判断下一帧是否出现撕裂点,若出现有撕裂点,则逐一获取该帧的撕裂点横坐标与上一帧所有被标记撕裂点横坐标的差值,判断横坐标的差值是否大于宽度范围,若所有的横坐标的差值大于宽度范围,则将该撕裂点进行标记,并置标记后的撕裂点出现次数为1,若存在有横坐标的差值小于宽度范围,则增加宽度范围内被标记撕裂点的出现次数,若没有出现有撕裂点,则判断撕裂点出现次数是否存在更新,若出现次数没有存在更新,则计算出撕裂的长度;
30、其中撕裂的长度计算公式如下:s=n*v/e,其中n为撕裂点出现次数,v为皮带的速度,e为帧数。
31、一种基于图像识别的检测皮带撕裂情况的系统,使用所述一种基于图像识别的检测皮带撕裂情况的方法,包括:选区模块、裁剪模块、拟合模块、判断模块、确定模块以及长度计算模块;
32、所述选区模块用于使用激光对皮带进行扫描,获取皮带的运行图像,并在运行图像中设定选取包含激光的roi区域;
33、所述裁剪模块用于裁剪出运行图像中每一帧的roi区域的原始图像;
34、所述拟合模块用于对原始图像的每一帧的roi区域进行拟合,得到激光的上边界下边界;
35、所述判断模块用于通过上边界与下边界之间的高度差值,获取得到撕裂可疑点组;
36、所述确定模块用于获取撕裂可疑点组与其相邻的像素点的曲率,判断撕裂可疑区点组的曲率是否满足曲率阈值,若满足,则将该点作为撕裂点;
37、所述长度计算模块用于统计宽度范围内获取撕裂点在运行图像出现的次数,并通过运行皮带的运行速度与撕裂点出现的帧数获取皮带的撕裂长度。
38、优选的,所述拟合模块包括第一处理子模块、第二处理子模块、第三处理子模块、第四处理子模块和第五处理子模块;
39、所述第一处理子模块用于使用cv2.medianblur函数对原始图像进行中值滤波;
40、所述第二处理子模块用于对滤波后的原始图像进行二值化处理,得到原始图像中的激光大致轮廓;
41、所述三处理子模块用于对激光大致轮廓进行区域生长或连通区域处理,获取最大的激光区域;
42、所述第四处理子模块用于对最大的激光区域进行边缘检测,获取激光轮廓;
43、所述第五处理子模块用于对激光轮廓使用曲线拟合算法,得到激光的上边界与下边界。
44、优选的,所述判断模块包括遍历子模块、分组子模块以及差值计算子模块;
45、所述遍历子模块用于对所述上边界与下边界进行遍历,将遍历后上边界与下边界的像素点坐标分别存储在两个坐标表内;
46、所述分组子模块用于对两个坐标表中同一横坐标的两个像素点作为一组判断点组;
47、差值计算子模块用于获取判断点组中两个像素点的纵坐标差值,若两个像素点之间的纵坐标差值大于差值阈值,则将该判断点组设为撕裂可疑点组。
48、优选的,确定模块包括第一计算子模块、第二计算子模块、第三计算子模块、第四计算子模块和第五计算子模块;
49、所述第一计算子模块用于分别获取撕裂可疑点组中两个像素点左右两侧的相邻像素点,并分别获取两个相邻像素点到可疑点组中像素点的距离ta和距离tb;
50、所述第二计算子模块用于构建一个二次函数模型:y=a0+a1x+a2x2;
51、使用距离ta和距离tb构建出第一矩阵;
52、所述第三计算子模块用于通过所述第一矩阵与一个二次函数模型共同算求出系数向量a0、a1与a2的具体数值;
53、所述第四计算子模块用于通过系数向量a1与a2获取该可疑点组的像素点的曲率;
54、所述第五计算子模块用于判断可疑点组中任一像素点的曲率是否大于曲率阈值,若大于,则将该可疑区点组标记为撕裂点。
55、优选的,所述长度计算模块包括第一分析子模块和第二分析子模块;
56、所述用于在当前帧首次出现撕裂点后,对撕裂点进行标记,并设置标记后的撕裂点出现次数为1;
57、所述第二分析子模块用于判断下一帧是否出现撕裂点,若出现有撕裂点,则逐一获取该帧的撕裂点横坐标与上一帧所有被标记撕裂点横坐标的差值,判断横坐标的差值是否大于宽度范围,若所有的横坐标的差值大于宽度范围,则将该撕裂点进行标记,并置标记后的撕裂点出现次数为1,若存在有横坐标的差值小于宽度范围,则增加宽度范围内被标记撕裂点的出现次数,若没有出现有撕裂点,则判断撕裂点出现次数是否存在更新,若出现次数没有存在更新,则计算出撕裂的长度。
58、上述技术方案中的一个技术方案具有如下优点或有益效果:本发明通过图像识别来对皮带的撕裂情况进行智能的检测,相较于现有技术通过人工确定皮带的撕裂程度,能够有效提高度量皮带撕裂的准确性,对皮带断裂作出及时的预警。
- 还没有人留言评论。精彩留言会获得点赞!