一种机器人操作台视觉拣选立体仓储机构及方法与流程
本发明涉及机器人操作台相关领域,具体是一种机器人操作台视觉拣选立体仓储机构及方法。
背景技术:
1、在机器人实训操作中,会根据教学任务搭建工作站,全套工作站含有轨迹跟踪单元、笔型示教单元、模拟冲压成型单元、码垛单元、搬运单元、立体仓储单元、视觉检测与分选单元、自动上下料单元,工作站配有中央控制柜,内有可编程序控制器用于全工作站控制联动、伺服系统用于分选单元定位控制、控制柜搭载单片机。
2、现有技术申请号cn201610424590.x,公开了一种基于无人输送分拣及存储系统的播种系统,包括控制系统,所述控制系统包括标签识别系统;还包括环形输送线,环形输送线上设有至少一台播种机器人;所述环形输送线接受上一级拣选系统从料箱ⅰ内拣选送来的货物;所述环形输送线具有一段播种段,所述播种段两侧具有与之平行的料箱ⅱ承载轨道。
3、现有技术上对经过的物料进行吸附分拣,而这样对于分拣的方式较为单调,不利于根据不同物料的实际情况情况进行分拣,设备的泛用性较小,且设备上较为缺少对于工具进行存放和检测的装置;且现有技术上在对物料进行分拣时,设备对于运输物料的各项数据不太了解,不利于设备对物料进行观察分拣,且被分拣的物料因其它因素的影响可能造成分拣未完成,继续运输会导致物料倾倒增大工作强度;
4、且现有技术上对于分拣工具的更换需要通过人工进行,而这样会导致增加更换工作的难度和强度,不利于对更换的工具进行快速安装和拆卸,且提高了更换工作的时间也会降低的设备整体工作的工作效率;而现有技术上是对物料进行吸附,而吸附工具在工作过程中极易与其它物品发生接触,而当吸附工具与其它物品进行过深的接触时,容易对其它物品造成破损,提高设备的使用维修成本。
技术实现思路
1、因此,为了解决上述不足,本发明在此提供一种机器人操作台视觉拣选立体仓储机构及方法。
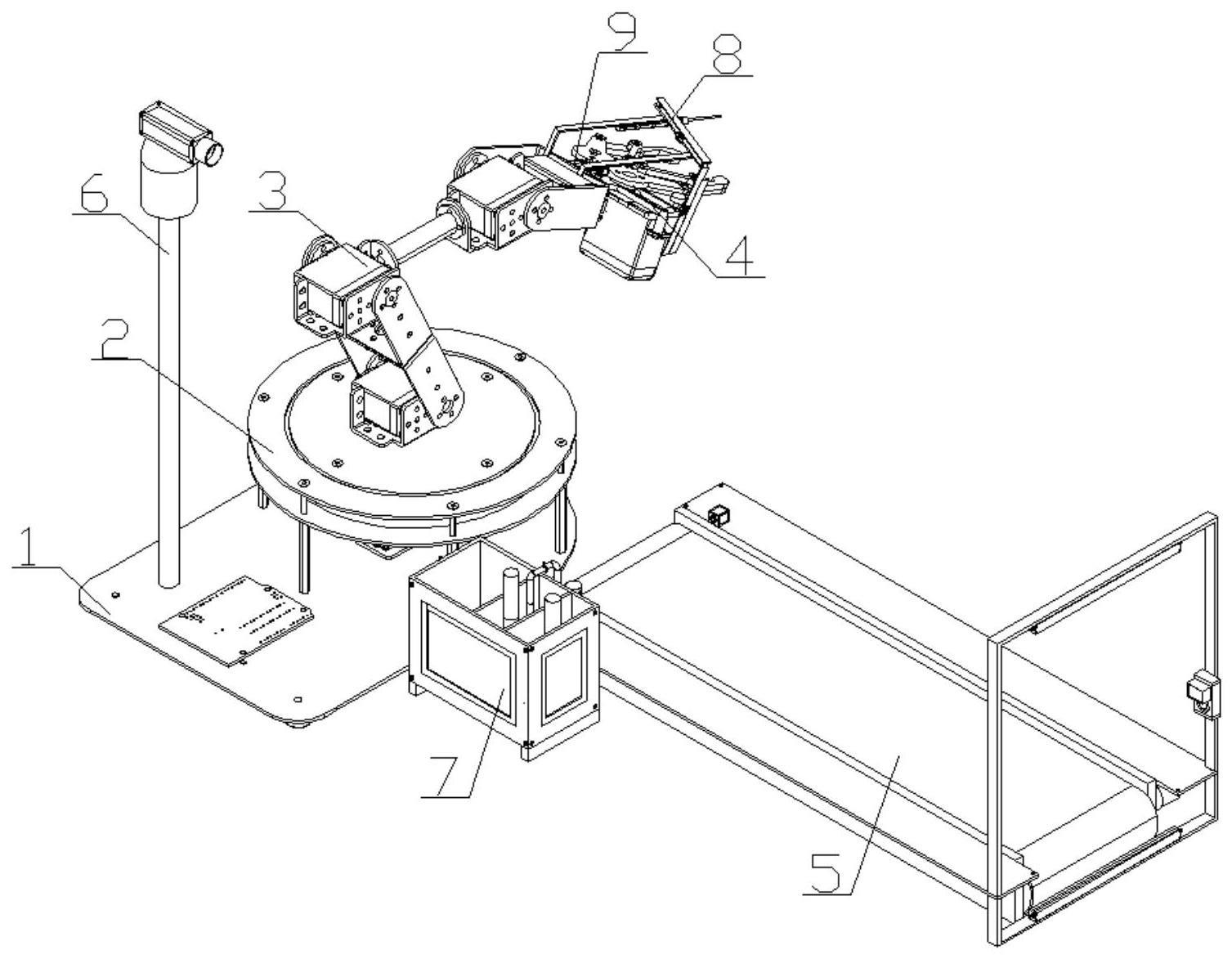
2、本发明是这样实现的,构造一种机器人操作台视觉拣选立体仓储机构及方法,该装置包括底板,所述底板顶部右端焊接安装座,所述安装座顶部转动连接有机械臂,所述机械臂顶部固定安装有电动夹具,所述安装座前方设置有输送机,所述底板顶部左后端通过横杆螺栓固定有工业相机;辅助装置,所述安装座前端设置有辅助装置;安全装置,所述机械臂左侧顶端设置有安全装置;更换装置,所述电动夹具底部设置有更换装置;所述辅助装置包括:放置箱,所述安装座前端设置有放置箱;电动吸盘,所述放置箱内槽的中端滑动放置有电动吸盘;电磁铁,所述放置箱内槽的后端设有电磁铁;蜂鸣器,所述放置箱右侧顶端螺钉固定有蜂鸣器;第一超声波距离传感器,所述放置箱后端面上端套环固定有第一超声波距离传感器;称重传感器,所述放置箱内槽内底部分别螺栓固定有三个称重传感器;光电传感器,所述放置箱内底部开孔分别安装固定有三个光电传感器;承重板,所述称重传感器顶部与承重板底部相接触;配检装置,所述放置箱右侧设置有配检装置。
3、优选的,所述配检装置包括:安装板,所述输送机左右两侧均螺钉固定有安装板,所述安装板输送机左侧安装板通过螺钉与放置箱相固定;红外线发射器,所述输送机左侧安装板的顶部后端与红外线发射器螺栓连接;红外线接收器,所述输送机右侧安装板的顶部后端与红外线接收器螺栓连接;上支撑架,所述安装板顶部前端螺栓安装有上支撑架;下支撑架,所述所述安装板底部前端螺栓安装有下支撑架;光栅发射端,所述下支撑架与光栅发射端底部螺栓连接;光栅测量传感器,所述上支撑架与光栅测量传感器顶部螺栓连接;条码扫描仪,所述上支撑架内右侧固定安装有条码扫描仪。
4、优选的,所述安全装置包括:直角架,所述机械臂左侧顶端螺栓安装有直角架;第二超声波距离传感器,所述机械臂左侧顶端直角架的右侧套环固定有第二超声波距离传感器;连通筒,所述机械臂左侧顶端直角架的右侧套环安装有连通筒;检测板,所述直角架与检测板右侧螺栓连接;行程开关,所述检测板左侧中端开槽卡紧安装有行程开关;连接弹簧,所述检测板右侧固定安装有连接弹簧;压板,所述连接弹簧左侧与压板右侧弹性连接;t型杆,所述连通筒内侧面滑动安装有t型杆;第一触碰传感器,所述连通筒内底部与第一触碰传感器底部螺栓连接。
5、优选的,所述更换装置包括:圆筒,所述机械臂顶部中端通过螺钉固定有圆筒;套筒,所述圆筒与套筒内侧面下端相焊接;步进电机,所述套筒外侧面前端固定有步进电机,且该步进电机传动轴与螺杆同轴转动;扇形块,所述该步进电机传动轴上的螺杆贯穿扇形块并与扇形块贯穿孔内侧面螺槽螺纹连接。
6、优选的,所述更换装置还包括:第二触碰传感器,所述圆筒内底部螺栓安装有第二触碰传感器;卡框圈,所述套筒内侧面滑动连接有卡框圈,所述卡框圈外侧面前端与扇形块后端相焊接;三角板,所述套筒内侧面上端焊接安装有三角板。
7、优选的,所述第二超声波距离传感器的数目设置有两个,且两个第二超声波距离传感器分别设置于机械臂左侧顶端的直角架右侧和套筒外侧面后端。
8、优选的,所述卡框圈内侧面上端均粘黏安装有橡胶垫。
9、优选的,所述三组承重板顶部均设置有海绵垫。
10、优选的,所述三角板倾斜面与安装座底部之间的夹角为二十度。
11、优选的,所述包括以下步骤:
12、步骤一:使用者通过控制终端控制启动输送机并带动商品进行移动,在商品进行输送时会经过光栅发射端和光栅测量传感器,通过对于光栅测量传感器接收光线的阻挡测量商品的宽度,而设有的条码扫描仪会对商品条形码进行扫描并获得商品数据,通过工业相机对于商品进行检测判断,且当商品对于红外线接收器接收的红外线进行阻挡时,红外线接收器向控制终端发射信号,控制终端控制关闭启动输送机等待将剩下的商品拣选;
13、步骤二:接着控制终端控制机械臂和电动夹具对于对应的商品的进行拣选并放置于对应的立体仓储区上,在对商品拣选的过程中,当电动夹具移动时与其它物体接触时,反作用力会带动压板对于行程开关进行按压并发射信号,且当第二超声波距离传感器发射超声波检测距离或反作用力带动t型杆对于第一触碰传感器进行挤压时也会进行信号发射,控制终端接收信号控制机械臂和电动夹具远离其它物体并继续工作;
14、步骤三:在需要更换拣选工具时,控制终端在工业相机的配合下带动机械臂转动,接着当第一超声波距离传感器发射超声波检测到距离变动时向控制终端发射信号,接着控制终端控制机械臂下降,而设置的光电传感器发射光束并对反射的光线进行接收检测,进而对机械臂在放置箱内的进入位置进行确定,而后机械臂将电动夹具放下并移动更换其它工具,且放置的电动夹具会带动承重板对于称重传感器施加压力,称重传感器检测到重量向控制终端发射信号,当控制终端在更换时未接收到信号控制启动蜂鸣器进行报警;
15、步骤四:在对拣选工具进行更换时,控制终端在工业相机的配合下带动机械臂和套筒下降到对应的工具前,并将电磁铁的上端套入到套筒内部,当电磁铁的上端与第二触碰传感器接触时向控制终端发射信号,接着控制终端控制启动步进电机,步进电机带动扇形块和卡框圈下降,卡框圈在三角板的挤压下会向内收缩并对电磁铁的上端进行夹紧固定。
16、本发明具有如下优点:本发明通过改进在此提供一种机器人操作台视觉拣选立体仓储机构及方法,与同类型设备相比,具有如下改进:
17、本发明所述一种机器人操作台视觉拣选立体仓储机构及方法,通过设置了辅助装置于安装座前端,通过第一超声波距离传感器对于拣选工具进行快速定位更换,并方便对于工具的存在进行检测报警,这样有利于提高更换拣选工具的定位精度,有效提高更换过程中的精准度,防止工具掉落在外部导致损坏,降低设备的使用维修成本,并对更换工具的存在重量进行检测,发现缺失进行自动报警。
18、本发明所述一种机器人操作台视觉拣选立体仓储机构及方法,通过设置了安全装置于机械臂左侧顶端,通过检测板挤压行程开关接通或t型杆与第一触碰传感器对于其它物体进行躲避,这样有利于对机械臂与其它物体的距离和碰撞进行检测,检测到碰撞后进行自动远离,避免接触挤压对于其它物体造成破损,导致使用维修成本增加,极大提高了工作过程中的安全性。
19、本发明所述一种机器人操作台视觉拣选立体仓储机构及方法,通过设置了更换装置于电动夹具底部,通过移动的卡框圈在三角板的挤压下会向内收缩并对拣选工具进行夹紧固定,这样有利于对拣选工具进行快速拆卸更换,降低更换工具的难度和时间,有效提高设备整体的工作效率,有效增强工具更换后的固定效果,降低设备工作过程中的危险性。
20、本发明所述一种机器人操作台视觉拣选立体仓储机构及方法,通过设置了配检装置于输送机上方,通过条码扫描仪对于商品的条码进行检测并配合工业相机进行配合工作,这样有利于对拣选的商品进行扫码获得对应商品数据,方便设备通过视觉方式对于商品进行检测判断并进行拣选,有效提高设备的拣选精度和拣选效果。
- 还没有人留言评论。精彩留言会获得点赞!