用于升降装卸车的急动减少的制作方法
本公开涉及配置成用于运输货物和材料的动力车辆领域。
背景技术:
1、配置成用于运输货物和材料的动力车辆比如叉车、端部骑乘车(end-rider)、中心骑乘车(center-rider)、托盘车、步行运货车等,在操作期间,车辆上可作用有多个力。这些力可随着车辆状况的变化在操作期间动态变化。例如,运输的货物和材料的位置调节、车辆行驶速度调节和车辆转弯半径调节都可能导致作用在车辆上的力改变。对力的这些改变加以补偿可帮助防止车辆或负载在搬运期间变得不稳定,否则可导致车辆翻倒或抬起车轮和/或负载松脱或倾覆。倾覆可导致车辆的操作员受伤、车辆损坏、负载损坏和/或环境破坏。相应地,车辆的操作员受过避免车辆和负载不稳定的训练;然而,人为失误仍可导致车辆或负载的不稳定。
2、解决车辆不稳定的一些传统方法只在车辆处于静止不动状况下时和/或只在以反作用方式响应车辆的不稳定状况时(即,只在车辆已经进入不稳定状况之后)才依靠补偿力。只在车辆处于静止不动状况下时才依靠补偿力没有考虑到力在车辆操作期间可能发生的变化。虽然以反作用的方式响应不稳定状况相比静止不动状况下的补偿有所改善,然而方法所提供的对于尝试纠正不稳定状况的能力有限。
技术实现思路
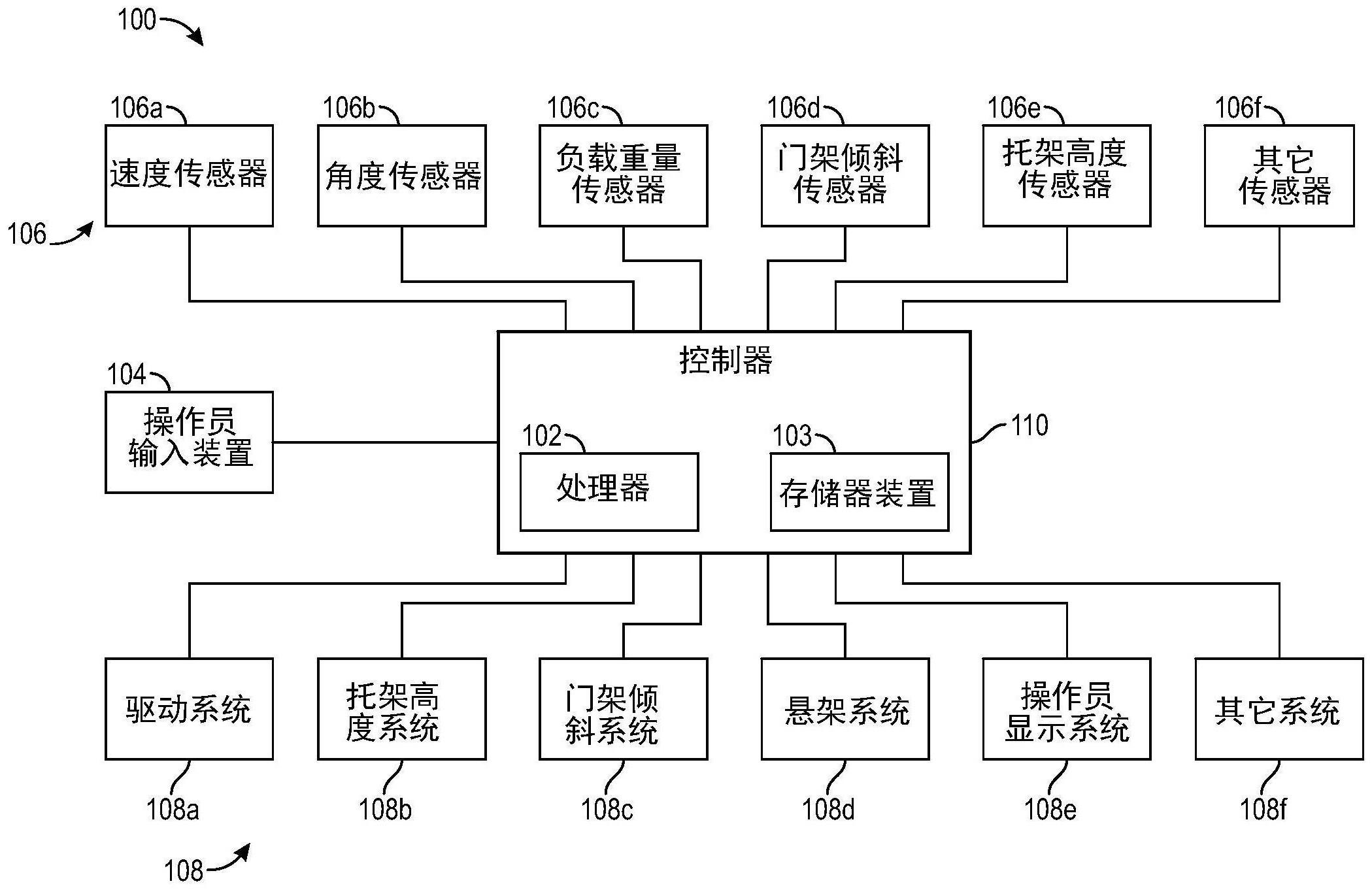
1、根据本技术的一个方面,提供了一种用于控制车辆的系统,包括:
2、一个或多个传感器;
3、联接到所述一个或多个传感器的处理器,其中,所述处理器配置成:
4、识别从所述一个或多个传感器接收的一个或多个值,其中,所述一个或多个值与所述车辆的一项或多项状况关联;
5、基于所述一个或多个值,确定作用在所述车辆的质心上的一个或多个力的净合力矢量;
6、确定净合力矢量与叠加在所述车辆基底附近的稳定性多边形之间的关系;以及
7、基于净合力矢量与稳定性多边形之间的所述关系,确定是否开启操作限制。
8、可选地,所述处理器配置成:响应于确定净合力矢量指向穿过稳定性多边形的在距稳定性多边形的边的预定距离内的一部分而开启操作限制。
9、可选地,所述操作限制包括限制车辆的操作和向车辆的操作员呈现指示中的至少一项。
10、可选地,限制车辆的操作包括限制车辆的行驶速度、加速率、减速率、托架高度、托架高度调节速度、门架倾斜和门架倾斜调节速度中的至少一种,并且其中,呈现指示包括改变用户显示器的一部分的颜色、在用户显示器上显示警告、发出声音和向操作者施加力中的至少一种。
11、可选地,所述处理器还配置成:
12、识别对于实施动作的请求,所述请求从车辆的用户输入装置被接收;
13、指令车辆实施动作,其中,如果开启操作限制,则所述动作受到操作限制的制约;
14、识别从一个或多个传感器接收的一个或多个值,其中,所述一个或多个值是与所述车辆的一项或多项状况关联;
15、基于所述一个或多个值和所述指令的动作,确定作用在车辆的质心上的一个或多个力的净合力矢量;
16、确定净合力矢量与叠加在所述车辆基底处的稳定性多边形之间的关系;以及
17、基于净合力矢量与稳定性多边形之间的所述关系,确定是否开启操作限制。
18、可选地,所述处理器还配置成:
19、基于所述一个或多个值和所述指令的动作,确定是否对稳定性多边形做出变化;以及
20、如果确定对稳定性多边形做出变化,则修改所述稳定性多边形。
21、可选地,所述操作限制包括在由处理器计算的一条或多条曲线下的区域,其中,每条曲线对应于一个车辆功能。
22、可选地,所述稳定性多边形包括三角形,其中,所述三角形的一边沿着所述车辆的第一轮轴延伸,并且与所述三角形的该边相对的所述三角形的顶点位于所述车辆的第二轮轴的中点处,并且其中,所述第一轮轴比所述第二轮轴更靠近车辆的托架。
23、根据本技术的另一个方面,提供了一种非暂时性计算机可读介质,其上存储有指令,其中,所述指令响应于被车辆的处理器执行而促使处理器:
24、识别从一个或多个传感器接收的一个或多个值,其中,所述值与车辆的一项或多项状况关联;
25、基于所述一个或多个值,确定作用在车辆的质心上的一个或多个力的净合力矢量;
26、确定净合力矢量与叠加在所述车辆基底附近的稳定性多边形之间的关系;以及
27、基于净合力矢量与稳定性多边形之间的所述关系,确定是否开启操作限制操作。
28、可选地,所述一个或多个值包括由车辆的托架支撑的负载的重量、车辆的托架的高度、车辆的门架的倾斜、车辆的转向角或车辆的行驶速度中的单项或任何组合。
29、可选地,所述指令响应于被处理器执行还促使处理器:响应于确定净合力矢量指向穿过稳定性多边形在距稳定性多边形侧边的预定距离内的一部分而开启操作限制。
30、可选地,所述操作限制包括限制车辆的功能和向车辆的操作员呈现指示中的一项或多项。
31、可选地,所述指令响应于被处理器执行还促使处理器:
32、识别对于实施动作的请求,所述请求从车辆的用户输入装置被接收;
33、指令车辆实施动作,其中,如果开启操作限制,则所述动作受到操作限制的制约;
34、识别从一个或多个传感器接收的一个或多个值,其中,所述一个或多个值是与所述车辆的一项或多项状况关联;
35、基于所述一个或多个值和所述指令的动作,确定作用在车辆的质心上的一个或多个力的净合力矢量;
36、确定净合力矢量与叠加在所述车辆基底处的稳定性多边形之间的关系;以及
37、基于净合力矢量与稳定性多边形之间的所述关系,确定是否开启操作限制。
38、可选地,所述指令响应于被处理器执行还促使处理器:
39、基于所述一个或多个值和所述指令的动作,确定是否对稳定性多边形做出变化;以及
40、如果确定对稳定性多边形做出变化,则修改所述稳定性多边形。
41、可选地,所述指令响应于被处理器执行还促使处理器:
42、通过限制车辆的行驶速度、加速率、减速率、托架高度、托架高度调节速度、门架倾斜和门架倾斜调节速度中的至少一项而限制所述车辆的功能,并且其中,呈现指示包括改变用户显示器的一部分的颜色、在用户显示器上显示警告、发出声音和向操作员施加力中的至少一种。
43、可选地,所述指令响应于被处理器执行还促使处理器:
44、基于所述一个或多个值,确定车辆的托架正在接近车辆的托架行程末端;
45、响应于确定托架正在接近托架行程末端,减慢托架位置的变化率;
46、基于所述一个或多个值,确定车辆的门架正在接近车辆的门架摆度末端;以及
47、响应于确定门架正在接近车辆的门架摆度末端,减慢门架倾斜调节的变化率。
48、根据本技术的另一个方面,还提供了一种控制车辆的方法,包括:
49、识别从车辆的一个或多个传感器接收的一个或多个值,其中,所述一个或多个值与车辆的一项或多项状况关联;
50、生成对应于车辆的功能的操作的操作限制表示,其中,所述操作限制表示指示基于所述一个或多个值的、车辆功能的操作限制;
51、识别对于实施与车辆功能关联的动作的请求;以及
52、实施所述动作,其中,所述动作受到操作限制的制约。
53、可选地,实施受到操作限制的制约的动作包括使车辆以最大的速率加速、使车辆以最大的速率减速、以最大的车速行驶、使车辆的托架向门架摆度的末端倾斜、使托架升高到最大高度、使车辆的门架以最大的速率倾斜或以最大的速率变化托架高度中的一项或多项,其中,使车辆以最大的速率加速、使车辆以最大的速率减速、以最大的车速行驶、使车辆的托架向门架摆度的末端倾斜、使托架升高到最大高度、使车辆的门架以最大的速率倾斜或以最大的速率变化托架高度中的每项都以比对于每个动作的车辆物理能力更小的值进行。
54、可选地,所述一个或多个值包括由车辆的托架支撑的负载的重量、托架的高度和车辆的门架的倾斜度。
- 还没有人留言评论。精彩留言会获得点赞!