一种用于箱子自动装卸货的装卸机器人以及装卸方法与流程
本发明涉及于物流设备,具体涉及一种用于箱子自动装卸货的装卸机器人以及装卸方法。
背景技术:
1、在烟草行业的日常物流工作中,需要将装有烟草制品的箱子装入到货车的车厢中或者从车厢中卸货,在装货时,需要将箱子装入进行码垛处理,从车厢最内处开始,从下至上逐层堆垛,箱子按照多层多列方式放置,形成一个箱垛墙,参加附图9所示,然后从车厢内到外,得到多个箱垛墙。卸货时,则需要将最外的箱垛墙中从上到下逐层地每次卸下若干箱子,并从外向内逐步卸下多个箱垛墙。传统的装卸货是采用人工装卸货,工人需要在车厢内整齐码垛货物,存在工作强度大、工作效率低的问题,随着物流领域自动化要求的不断提高,传统的依靠纯人工进行车辆装车方式已无法满足企业需求。因此,如何高效地对货车进行装卸货成为了企业一直寻求解决的问题。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明要解决的技术问题在于提供一种用于箱子自动装卸货的装卸机器人以及装卸方法,进行用于箱子自动装货堆垛或者拆垛卸货。
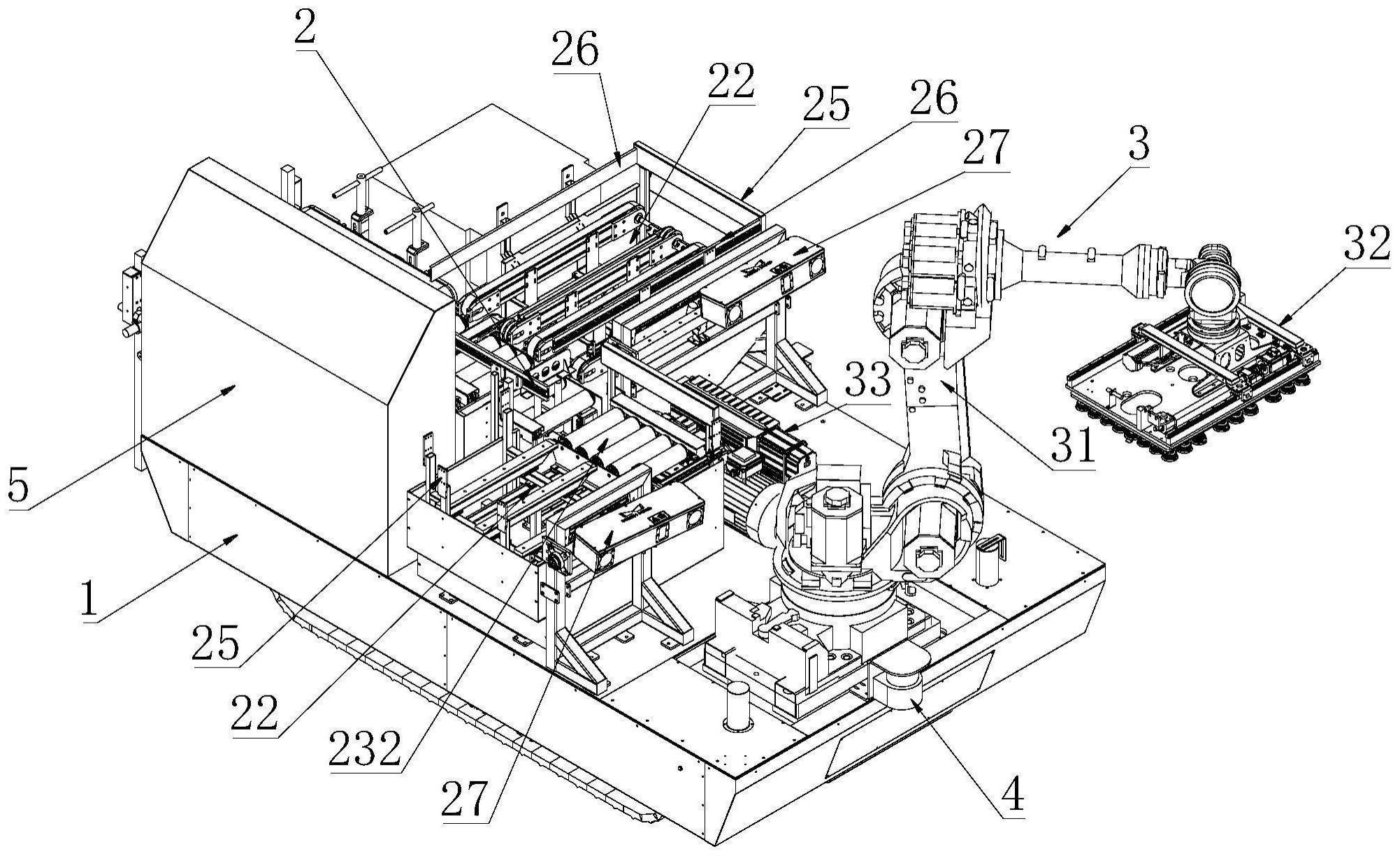
2、为实现上述目的,本发明提供一种用于箱子自动装卸货的装卸机器人,包括运载车,还包括都设置在运载车上的存放输送装置、装卸抓取装置、导航定位系统、视觉扫描系统和中心控制系统,所述存放输送装置用于放置且输送箱子,所述存放输送装置中设有抓取工位和进出货工位,且存放输送装置能够将箱子在进出货工位和抓取工位之间输送转移,所述存放输送装置还包括能够检测抓取工位上的箱子情况的检测机构,所述检测机构与中心控制系统通讯相连;所述装卸抓取装置包括安装在运载车上的装卸机械臂、以及安装在装卸机械臂上的夹具机构,所述夹具机构能够抓取若干箱子,所述导航定位系统用于判断运载车与周边物体之间的距离,所述导航定位系统与中心控制系统通讯相连;所述视觉扫描系统包括能够对运载车前方进行视觉拍摄的3d视觉相机,所述视觉扫描系统与中心控制系统通讯相连;所述中心控制系统与装卸机械臂和夹具机构都控制相连,所述中心控制系统与存放输送装置控制相连,所述中心控制系统与运载车控制相连。
3、进一步地,所述抓取工位能够容纳多个相并靠的箱子。
4、进一步地,所述存放输送装置包括总输送道、多个分支输送道和多个换向机构,且每个分支输送道上都设有一个抓取工位;所述总输送道沿前后方向输送,且其后端处为进出货工位,所述总输送道上设有换向工位,所述分支输送道一端与总输送道的换向工位相接,且相接处都设有一个换向机构,所述换向机构能够使箱子从总输送道的换向工位上进入到分支输送道上,所述中心控制系统与换向机构控制相连;所述存放输送装置还包括用于检测总输送道的换向工位上箱子情况的换向检测组件,且换向检测组件与中心控制系统通讯相连。
5、进一步地,所述存放输送装置包括总输送道、多个分支输送道和多个换向机构,且每个分支输送道上都设有一个抓取工位;所述总输送道沿前后方向输送,且其后端处为进出货工位,所述总输送道上设有换向工位,所述分支输送道一端与总输送道的换向工位相接,且相接处都设有一个换向机构,所述换向机构能够使箱子从总输送道的换向工位上进入到分支输送道上,所述中心控制系统与换向机构控制相连;;所述存放输送装置还包括用于检测总输送道的换向工位上箱子情况的换向检测组件,且换向检测组件与中心控制系统通讯相连。
6、进一步地,所述总输送道包括进出口输送带和输送辊道,所述进出货工位设置在进出口输送带上,所述进出口输送带的前端与输送辊道后端相对接,所述换向工位设置在输送辊道上。
7、进一步地,所述换向机构包括升降架、多条设置在升降架上的换向输送带、以及升降驱动组件,且换向输送带位于输送辊道中的相连辊子的间隙中,所述升降驱动组件能够驱动升降架升降运动使换向输送带高于或者低于输送辊道,且换向输送带升高时与分支输送道相对接,所述中心控制系统与升降驱动组件控制相连
8、进一步地,所述抓取工位侧边设有停靠限位挡板,当箱子在分支输送道上运动到抓取工位时与停靠限位挡板相抵。
9、进一步地,所述装卸抓取装置的夹具机构包括多个子夹具和松紧调节组件,多个子夹具沿着直线排列,每个子夹具用于抓取一个箱子,所述松紧调节组件能够调节相邻两个子夹具的间距,所述中心控制系统独立地控制各个子夹具工作。
10、进一步地,所述夹具机构包括真空吸盘。
11、进一步地,所述夹具机构包括夹具支架,多个子夹具安装在夹具支架上并布置在一条直线上,所述子夹具能够在夹具支架上直线运动,所述松紧调节组件安装在夹具支架上。
12、本发明还提供一种用于箱子自动装卸货的装卸方法,用于在车厢中装卸箱子,采用上述的装卸机器人进行,包括装货工作和/或卸货工作:
13、a、装货工作,用于将箱子装入到车厢内并堆垛成箱垛墙,包括以下操作:
14、a1、进箱操作:将装卸机器人放置在车厢内,箱子通过进出货工位进入到存放输送装置中,存放输送装置将箱子输送到抓取工位上;
15、a2、单次装箱操作,包括以下步骤:
16、a21、装卸机器人通过视觉扫描系统扫描车厢内的箱垛墙的情况,并根据设定好的箱垛墙堆垛顺序,确定本次所需要放置箱子的位置和数量n,并根据装卸机械臂的活动范围,确定装卸机器人对应所需要停靠的停车位置,通过导航定位系统判断装卸机器人是否在停车位置,如不是,则中心控制系统控制运载车移动至停车位置;
17、a22、中心控制系统控制装卸抓取装置工作,装卸机械臂带动夹具机构移动到抓取工位处抓取n个箱子,然后根据视觉扫描系统确定箱子放置位置,控制装卸机械臂运动,将夹具机构中的箱子放置在该位置,松开夹具机构;
18、b、卸货工作,用于将车厢内已有的箱垛墙中的箱子进行卸货,包括以下操作:
19、b1、准备操作:将装卸机器人放置在车厢的内部或者门口之外,并与车厢内的箱垛墙保持一定距离;
20、b2、单次卸箱操作,包括以下步骤:
21、b21、装卸机器人通过视觉扫描系统扫描车厢内的箱子的箱垛墙的情况,并根据设定好的箱垛墙拆垛顺序,判断本次所需要拿取箱子的位置和数量n,并根据装卸机械臂的活动范围,确定装卸机器人对应所需要停靠的停车位置,通过导航定位系统判断装卸机器人是否在停车位置,如不是,则中心控制系统控制运载车移动至停车位置;
22、b22、中心控制系统控制装卸抓取装置工作,装卸机械臂带动夹具机构移动到所需要拿取箱子的位置处并拿取n个箱子,然后装卸机械臂将夹具机构运动到抓取工位上方,并将箱子放置到抓取工位上,松开夹具机构;
23、b3、出箱操作:存放输送装置将箱子从抓取工位输送到进出货工位,并从进出货工位离开装卸机器人
24、如上所述,本发明涉及的装卸机器人以及装卸方法,具有以下有益效果:
25、1、能够用于箱子在车厢等封闭室内场所中的自动装货堆垛或者拆垛卸货,可以满足厢式货车有限空间内的自动装车及卸车的需求,实现装卸工作的自动化,能够节省人工,减少人工劳动强度,提高装车作业效率。
26、2、装卸机器人能够进行持续地作业,装卸机器人能够根据实际情况每次装卸不同数量的箱子,使用灵活,能够使用不同情况下的使用需要。
27、3、装卸机器人在装卸箱子时,取放定位准确,稳定可靠,能够有效地避免作业错误。
- 还没有人留言评论。精彩留言会获得点赞!