一种目标固定子系统及固定方法与流程
本发明涉及运输,具体涉及一种目标固定子系统自动转运控制系统及固定方法。
背景技术:
1、我国汽车出口主要有汽车运输船、集装箱船、中欧班列和公路汽车运输等方式。其中,海运的运量排在首位,而汽车运输船是主要运输方式。运输过程中的原则是对汽车采取的动作越少、运输质量越好。因此,在接车、装车、卸车等车辆转运过程中如何避免车辆损耗和破损的同时提高转运效率,是始终需要面对的技术问题。
2、现有技术中,待转运车辆存在质量、轴距和轮胎尺寸等变化因素,转运设备虽然具有夹持、提升和固定功能但缺少针对车辆型号的调节手段,在较高装载密度的车辆摆放场景下,无法有效满足在高转运效率需求下对转运稳定性的要求。
技术实现思路
1、鉴于上述问题,本发明实施例提供一种目标固定子系统及固定方法,解决车辆在较高装载密度的情况下缺乏转运稳定性技术手段的技术问题。
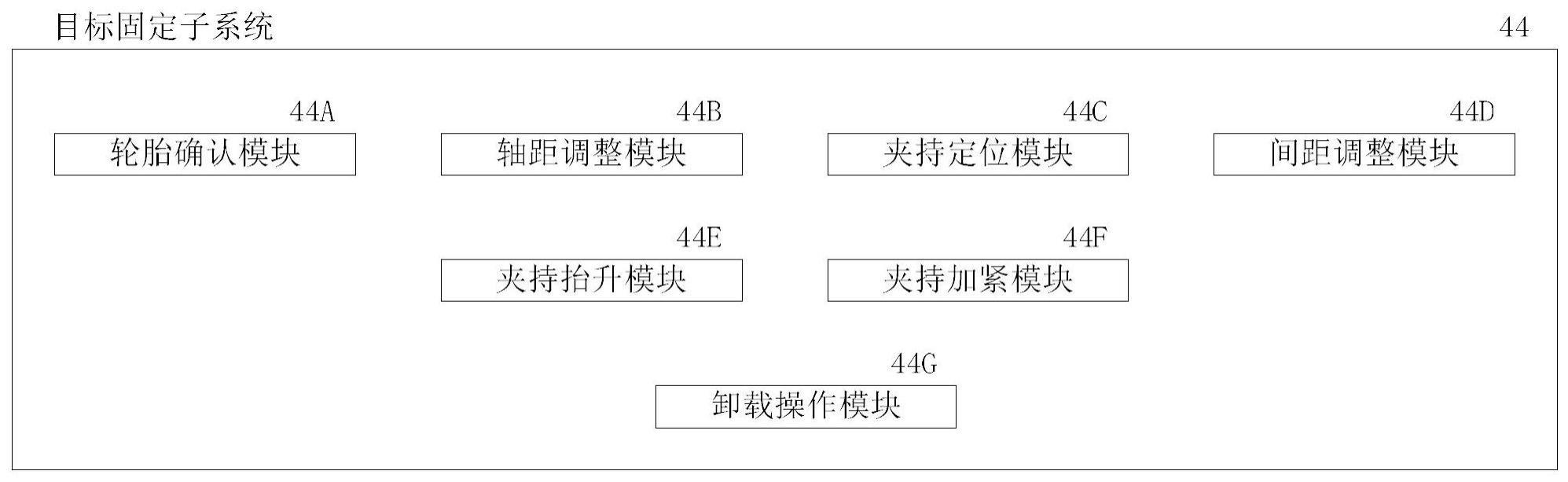
2、本发明实施例的目标固定子系统,包括:
3、轮胎确认模块,用于根据现场运行数据中线激光轮胎定位传感器的时序数据,形成轮胎数据处理过程,实现轮胎状态确认;
4、轴距调整模块,用于根据现场运行数据中当前车辆的前后轮胎状态形成同侧夹持机构的轴距数据处理过程,实现夹持机构间距调整;
5、夹持定位模块,用于根据现场运行数据中当前车辆的同侧前后夹持机构的间距形成定位数据处理过程,实现夹持机构与车辆轮胎的对齐;
6、间距调整模块,用于根据现场运行数据中当前车辆的轮胎外径和轮胎夹持位置形成间距数据处理过程,实现夹持机构托举横杆的间距调整;
7、夹持抬升模块,用于根据现场运行数据中夹持机构动作到位信息形成抬升数据处理过程,实现轮胎抬升到位;
8、夹持加紧模块,用于根据现场运行数据中转运设备运行状态信息形成加紧数据处理过程,实现转运过程中的车辆稳定。
9、本发明一实施例中,所述轮胎确认模块的轮胎数据处理过程包括:
10、-获取线激光轮胎定位传感器的安装基准、基准朝向和扫描长度,确定扫描范围;
11、-获取车轮侧面进入扫描范围后根据轮胎周向前后外缘的反射信号确定轮胎的前外缘反射距离len1和后外缘反射距离len2,根据基准朝向确定轮胎的前外缘测量角angle1和后外缘测量角angle2;
12、-根据前、后外缘的反射距离和前、后外缘测量角确定对应扫描范围内相交光线段的弦长l;
13、-根据弦长l和扫描范围相对高度d确定轮胎外径和周长c。
14、本发明一实施例中,所述轴距调整模块的轴距数据处理过程包括:
15、-获取当前车辆进入转运设备的贯通通道时,在同一时刻,车辆同侧的前轮轮胎相对转运设备贯通通道后部的线激光轮胎定位传感器的前轮胎轴线投影位置dis1,以及车辆同侧的后轮轮胎相对转运设备贯通通道前部的线激光轮胎定位传感器的后轮胎轴线投影位置dis2;
16、-根据转运设备前部的线激光轮胎定位传感器的安装基准、车辆后轮胎轴线投影位置dis2、转运设备后部的线激光轮胎定位传感器的安装基准和车辆前轮胎轴线投影位置dis1确定车辆前后车轴间距;
17、-轴距调节机构根据前后轴间距调整同侧前后夹持机构的间距;
18、-根据现场运行数据中的线激光轴距传感器的时序数据反馈同侧夹持机构的间距调整是否到位。
19、本发明一实施例中,所述夹持定位模块的定位数据处理过程包括:
20、-根据线激光轮胎定位传感器的安装基准确定夹持机构动作参照基准位置的相对位置;
21、-根据夹持机构动作参照基准与轮胎轴线投影位置dis1的相对位置偏差形成转运设备的驱动信号,驱动转运设备移动对齐夹持机构与轮胎。
22、本发明一实施例中,所述间距调整模块的间距数据处理过程包括:
23、-根据当前车辆的轮胎外径和轮胎夹持位置形成夹持机构的托举横杆的间距调整数据,根据间距调整数据调整托举横杆动作到位时的水平间距;
24、-根据现场运行数据中的线激光间距传感器的时序数据反馈夹持机构的间距调整是否到位。
25、本发明一实施例中,所述夹持抬升模块的抬升数据处理过程包括:
26、-根据接近开关时序数据判断托举横杆动作到位时,形成抬升控制数据,控制升降机构带动夹持机构托举轮胎上升至指定高度。
27、本发明一实施例中,所述夹持加紧模块的加紧数据处理过程包括:
28、-根据接近开关传感器时序数据、抬升控制数据和转运设备运行状态形成夹紧机构动作,使得夹紧机构动作部件轴向抵接车轮轮毂。
29、-根据转运设备的运行速度、地面落差和车辆质量进行轴向抵接力量调整。
30、本发明一实施例中,还包括:
31、卸载操作模块,用于根据现场运行数据中路径规划数据形成卸载数据处理过程,实现车辆卸载。
32、本发明一实施例中,所述卸载操作模块的卸载数据处理过程包括:
33、-根据路径规划数据判断是否到达卸载地点,在卸载地点形成夹紧机构、升降机构和夹持机构的卸载顺序控制数据,实现车辆卸载。
34、本发明实施例的固定方法,包括:
35、根据现场运行数据中线激光轮胎定位传感器的时序数据,形成轮胎数据处理过程,实现轮胎状态确认;
36、根据现场运行数据中当前车辆的前后轮胎状态形成同侧夹持机构的轴距数据处理过程,实现夹持机构间距调整;
37、根据现场运行数据中当前车辆的同侧前后夹持机构的间距形成定位数据处理过程,实现夹持机构与车辆轮胎的对齐;
38、根据现场运行数据中当前车辆的轮胎外径和轮胎夹持位置形成间距数据处理过程,实现夹持机构托举横杆的间距调整;
39、根据现场运行数据中夹持机构动作到位信息形成抬升数据处理过程,实现轮胎抬升到位;
40、根据现场运行数据中转运设备运行状态信息形成加紧数据处理过程,实现转运过程中的车辆稳定。
41、本发明实施例的目标固定子系统及固定方法利用定制化数据处理过程对现场转运过程中车辆固定运输工作场景下的现场运行数据进行数据处理形成各对应受控机电执行机构的综合控制流程。综合控制过程根据现场运行数据中的运行策略数据、规划数据和现场工况数据有效形成车辆的自动测量、自动适应和自动固定的控制流程,并保证了自动运输过程中的车辆稳定性。
技术特征:
1.一种目标固定子系统,其特征在于,包括:
2.如权利要求1所述的目标固定子系统,其特征在于,所述轮胎确认模块的轮胎数据处理过程包括:
3.如权利要求1所述的目标固定子系统,其特征在于,所述轴距调整模块的轴距数据处理过程包括:
4.如权利要求1所述的目标固定子系统,其特征在于,所述夹持定位模块的定位数据处理过程包括:
5.如权利要求1所述的目标固定子系统,其特征在于,所述间距调整模块的间距数据处理过程包括:
6.如权利要求1所述的目标固定子系统,其特征在于,所述夹持抬升模块的抬升数据处理过程包括:
7.如权利要求1所述的目标固定子系统,其特征在于,所述夹持加紧模块的加紧数据处理过程包括:
8.如权利要求1所述的目标固定子系统,其特征在于,还包括:
9.如权利要求8所述的目标固定子系统,其特征在于,所述卸载操作模块的卸载数据处理过程包括:
10.一种固定方法,其特征在于,包括:
技术总结
本发明提供一种目标固定子系统及固定方法,解决车辆在较高装载密度的情况下缺乏转运稳定性技术手段的技术问题。系统包括:轮胎确认模块根据现场运行数据中线激光轮胎定位传感器的时序数据,形成轮胎数据处理过程,实现轮胎状态确认;轴距调整模块根据现场运行数据中当前车辆的前后轮胎状态形成同侧夹持机构的轴距数据处理过程,实现夹持机构间距调整;间距调整模块根据现场运行数据中当前车辆的轮胎外径和轮胎夹持位置形成间距数据处理过程,实现夹持机构托举横杆的间距调整;还包括夹持定位模块、夹持抬升模块和夹持加紧模块。有效形成车辆的自动测量、自动适应和自动固定的控制流程,并保证了自动运输过程中的车辆稳定性。
技术研发人员:李明,黎成杰,喻绍雷,宋策,罗华成,冯宁,马彤彤,王硕
受保护的技术使用者:北京特种机械研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!