一种可兼容位置偏差的双侧锁止机构的制作方法
本申请涉及机械锁,特别涉及一种可兼容位置偏差的双侧锁止机构。
背景技术:
1、滑架是用来支撑货物的吊具,并使它沿着架空轨道运行,或者用来支撑链条质量,以免链条产生过大的挠度。
2、相关技术中,滑架沿导轨轴向进行运动,为保证两侧滑架在运动到位后被锁紧,通常采用两套动力源分别带动锁止机构实现对两侧滑架的锁紧。锁止动作时,通常采用刚性销轴与滑架上的销孔配合锁紧。
3、但是,采用刚性销轴与销孔配合锁紧,工作时需保证销轴与销孔的中心轴线重合,销轴才能插入销孔,其对滑架停止位置精度要求高,若滑架实际停止位置和预定停止位置存在一定偏差,容易出现销轴无法插入销孔而导致滑架位置锁定失效的情况,因此,有必要提出一种可兼容位置偏差的双侧锁止机构,以解决上述问题。
技术实现思路
1、本申请实施例提供一种可兼容位置偏差的双侧锁止机构,以解决相关技术中采用刚性销轴与销孔配合锁紧对滑架停止位置精度要求高的问题。
2、本申请实施例提供了一种可兼容位置偏差的双侧锁止机构,包括:
3、滑动件,所述滑动件沿y方向具有滑动自由度,所述滑动件上沿y方向设置有至少两个锁槽;
4、安装架,所述安装架位于锁槽的开口侧,所述安装架上滑动连接有与锁槽配合的锁杆,所述锁槽和锁杆的截面沿锁杆的伸出方向逐渐变小,相邻两个所述锁杆的轴线距离大于或小于相邻两个所述锁槽的中心距离。
5、一些实施例中,所述锁槽的内侧壁为锥形面,所述锁杆的端部设置有与锥形面相适配的倒角,所述倒角和锥形面抵接以在y方向限位所述滑动件。
6、一些实施例中,还包括设置在安装架上的驱动机构和联动机构,所述驱动机构通过联动机构带动所述锁杆进入或脱离锁槽。
7、一些实施例中,所述联动机构包括连杆和摆杆,所述连杆的两端设置有沿连杆长度方向延伸并用于转动连接锁杆的长圆孔,所述驱动机构通过驱动摆杆带动连杆移动以使连杆推动锁杆移动。
8、一些实施例中,所述联动机构还包括位于相邻两个锁杆之间并滑动连接在安装架上的横杆,所述横杆和连杆转动连接,所述摆杆与连杆或横杆转动连接。
9、一些实施例中,所述驱动机构包括锁止机构和解锁机构,所述锁止机构通过联动机构驱动所述锁杆进入锁槽,所述解锁机构通过联动机构驱动所述锁杆脱离锁槽。
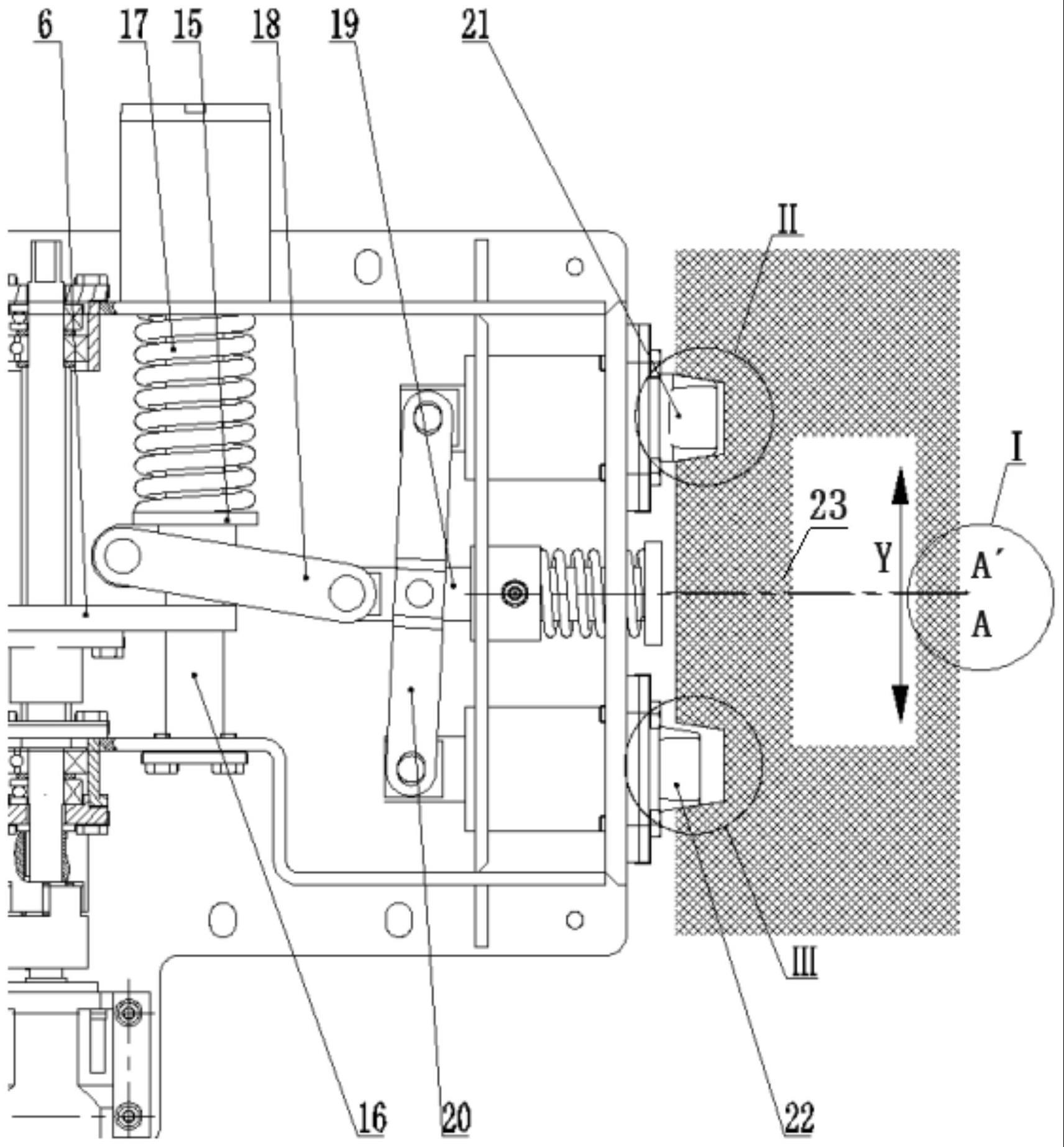
10、一些实施例中,所述锁止机构包括设置在安装架上的导向杆,以及滑动连接在导向杆上并与摆杆转动连接的导向套,所述导向杆上设置有挤压导向套的第一弹性件,所述第一弹性件利用弹力驱动导向套沿导向杆移动以使导向杆带动摆杆推动连杆移动。
11、一些实施例中,所述解锁机构包括设置在安装架上的电机,所述电机的输出端通过联轴器连接有丝杆,所述丝杆上螺纹连接有滑套,所述滑套上固定有用于推动导向套挤压第一弹性件的推板。
12、一些实施例中,所述安装架上设有开口朝向锁杆伸出方向的安装壳,所述锁杆滑动连接于安装壳内,所述安装壳的开口处设置有用于导向锁杆的安装盖,所述锁杆的侧壁上设置有防止锁杆脱离安装壳的凸缘;
13、所述锁杆为阶梯轴,所述阶梯轴的台阶面背向所述安装盖,所述阶梯轴上设置有抵接在台阶面和安装壳之间的第二弹性件。
14、一些实施例中,所述安装架上设置有供横杆穿过的限位套,所述横杆远离连杆的一端固设有环形块,所述安装架上设置有避让环形块的让位孔,所述横杆上设置有位于环形块和限位套之间的第三弹性件。
15、本申请提供的技术方案带来的有益效果包括:
16、本申请实施例提供了一种可兼容位置偏差的双侧锁止机构,其中滑动件沿y方向具有滑动自由度,滑动件上沿y方向设置有至少两个锁槽;安装架位于锁槽的开口侧,安装架上滑动连接有与锁槽配合的锁杆,锁槽和锁杆的截面沿锁杆的伸出方向逐渐变小,相邻两个锁杆的轴线距离大于或小于相邻两个锁槽的中心距离。
17、因此,本申请的锁止机构具有位置偏差兼容性,当带有销孔的滑动件实际停止位置与预定位置有偏差时,由于锁槽和锁杆的截面沿锁杆的伸出方向逐渐变小,锁杆和锁槽的中心轴线存在偏差时,锁杆也能至少部分进入锁槽,同时由于相邻两个锁杆的轴线距离大于或小于相邻两个锁槽的中心距离,相邻两个锁杆可以抵接在两个锁槽的相对侧或相背侧,进而限制滑动件在y方向移动,从而可以在一定范围内兼容滑动件停止时的位置偏差,降低了对滑动件停止位置的精度要求。
技术特征:
1.一种可兼容位置偏差的双侧锁止机构,其特征在于,包括:
2.如权利要求1所述的可兼容位置偏差的双侧锁止机构,其特征在于:
3.如权利要求1所述的可兼容位置偏差的双侧锁止机构,其特征在于:
4.如权利要求3所述的可兼容位置偏差的双侧锁止机构,其特征在于:
5.如权利要求4所述的可兼容位置偏差的双侧锁止机构,其特征在于:
6.如权利要求3所述的可兼容位置偏差的双侧锁止机构,其特征在于:
7.如权利要求6所述的可兼容位置偏差的双侧锁止机构,其特征在于:
8.如权利要求7所述的可兼容位置偏差的双侧锁止机构,其特征在于:
9.如权利要求1所述的可兼容位置偏差的双侧锁止机构,其特征在于:
10.如权利要求5所述的可兼容位置偏差的双侧锁止机构,其特征在于:
技术总结
本申请涉及一种可兼容位置偏差的双侧锁止机构,属于机械锁技术领域,包括滑动件,所述滑动件沿Y方向具有滑动自由度,所述滑动件上沿Y方向设置有至少两个锁槽;安装架,所述安装架位于锁槽的开口侧,所述安装架上滑动连接有与锁槽配合的锁杆。因此,锁止机构具有位置偏差兼容性,由于锁槽和锁杆的截面沿锁杆的伸出方向逐渐变小,锁杆和锁槽的中心轴线存在偏差时,锁杆也能至少部分进入锁槽,同时由于相邻两个锁杆的轴线距离大于或小于相邻两个锁槽的中心距离,相邻两个锁杆可以抵接在两个锁槽的相对侧或相背侧,进而限制滑动件在Y方向移动,从而可以在一定范围内兼容滑动件停止时的位置偏差,降低了对滑动件停止位置的精度要求。
技术研发人员:鲁伟,张华雷,张恒,王强,雷威,汪熊,黄文鹏
受保护的技术使用者:中国兵器工业集团江山重工研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!