一种码垛工业机器人及其操作方法与流程
本发明涉及工业机器人,具体涉及一种码垛工业机器人及其操作方法。
背景技术:
1、国内目前正处于进行生产设备自动化从无到有的发展历程之中,自动化设备主要是将工厂原有的生产线中的设备尽可能的利用起来以节省企业成本。所以目前的自动化设备应该更加符合非定制化、普适化,能够简便地进行移植,才是符合当前企业,尤其是传统加工制造型企业。随着科技的发展,许多企业都开始使用高效率的机器进行工作,以减少人力成本投入,提高工作效率,增强企业的竞争力。比如在一些加工车间加工包装完的产品需要进行码垛,然后运送到仓库。码垛机是研制开发的新机型,质量稳定,性价比高。码垛机会寻找最合理的轨道来移动,,目前的码垛机器人在工作时往往单靠码垛手抓夹持住货物,码垛手抓在工作时往往做着单调、频繁和重复的长时间作业,码垛手抓的运输稳定性是重要的性能指标之一,一旦货物从码垛手抓中脱落很容易造成货物损坏,因此本发明提供一种码垛工业机器人及其操作方法。针对现有技术存在以下问题:
2、1、现有的码垛工业机器人及其操作方法,工作效率低,固定时的稳定性较差,容易使产品滑落导致摔坏,造成不必要的损失;
3、2、现有的码垛工业机器人及其操作方法,不便于自动进行位置调节,不能够准确地将物品进行夹持码垛,自动化程度较低,不便于实现快速生产。
技术实现思路
1、为解决上述技术问题,本发明所采用的技术方案是:
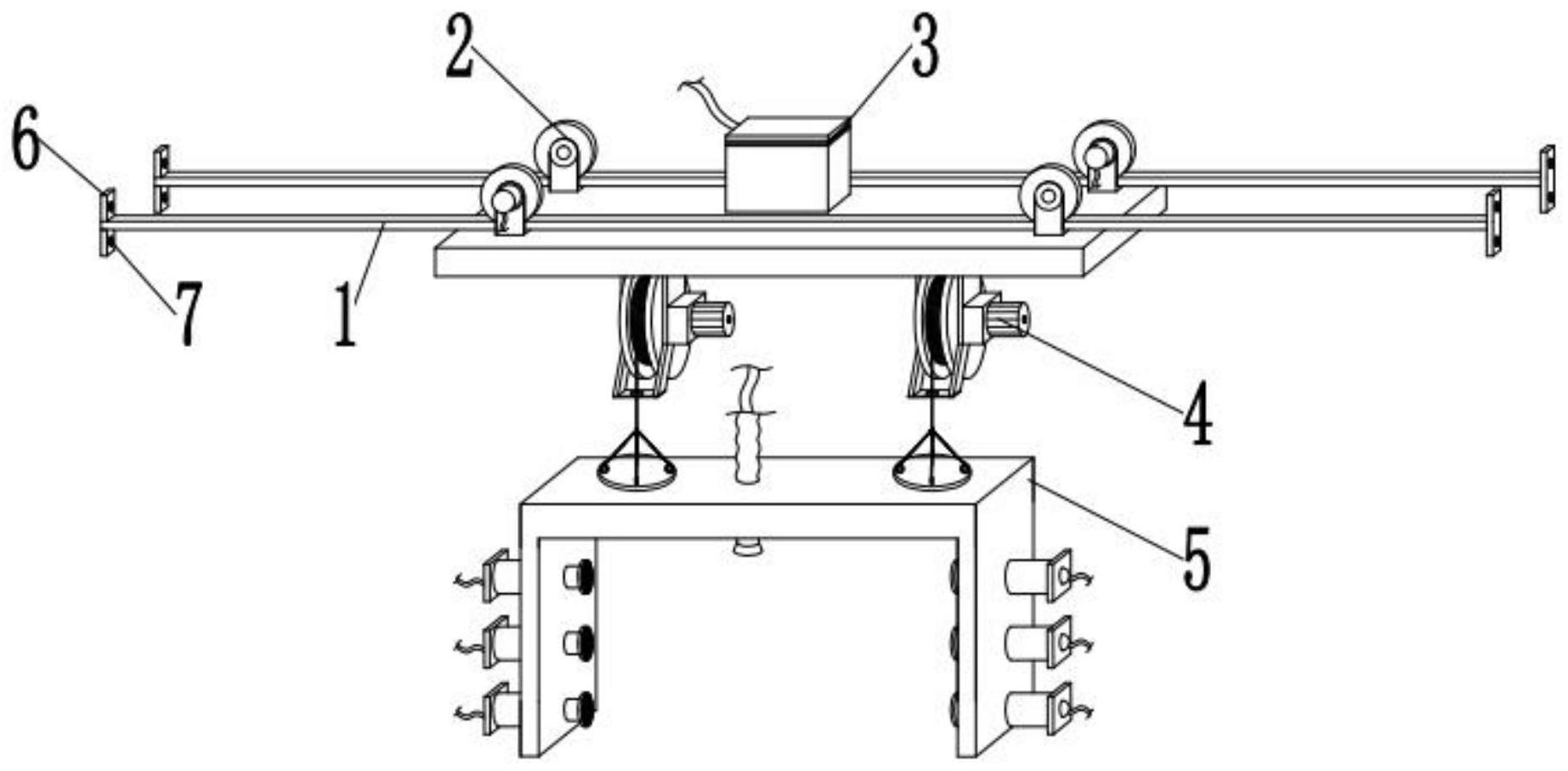
2、一种码垛工业机器人,包括主体,所述主体的底部设置有移动组件,所述主体的两端固定安装有安装架,所述安装架的一侧设置有螺纹孔,所述移动组件包括移动板,所述移动板的顶部固定安装有移动架,所述移动架的内部转动连接有连接轴,所述移动架的内部通过连接轴转动连接有滑轮,其中两个所述移动架的一侧固定安装有移动马达,所述移动马达的底部固定连接有连接线。
3、本发明技术方案的进一步改进在于:所述移动板的顶部设置有控制组件,所述控制组件包括控制盒,所述控制盒的一侧固定连接有数据线,所述控制盒的内部固定安装有电路板。
4、本发明技术方案的进一步改进在于:所述电路板的顶部螺纹连接有固定螺栓,所述电路板的顶部固定连接有监测模块,所述电路板的顶部嵌入安装有计算模块,所述电路板的顶部固定连接有控制模块。
5、本发明技术方案的进一步改进在于:所述移动板的底部设置有调节组件,所述调节组件包括安装板,所述安装板固定安装在移动板的底部,所述安装板的顶部设置有安装孔。
6、本发明技术方案的进一步改进在于:所述安装板的底部固定安装有连接架,所述连接架的内部转动连接有回收转盘,所述连接架的一侧固定安装有自锁电机,所述自锁电机的输出端固定安装在回收转盘的一侧。
7、本发明技术方案的进一步改进在于:所述回收转盘的底部活动连接有钢丝绳,所处钢丝绳的底端固定安装有固定圆盘,所述连接架的底部固定安装有限位架,所述限位架的底部设置有限位孔。
8、本发明技术方案的进一步改进在于:所述固定圆盘的底部设置有固定组件,所述固定组件包括固定架,所述固定架固定安装在固定圆盘的底部,所说固定架的顶部设置有安装槽,所述固定架的内部固定安装有红外检测器,所述红外检测器的顶部固定连接有橡胶伸缩管。
9、本发明技术方案的进一步改进在于:所述橡胶伸缩管的内部贯穿连接有数据传输线,所述固定架的两侧均固定安装有液压调节杆,所述液压调节杆的一端固定安装有防滑板,所述液压调节杆的另一端固定安装有连接管。
10、一种码垛工业机器人操作方法,包括以下步骤,
11、s1、位置检测:工业机器人通过检测系统检测货物所在位置,根据货物所在位置进行自我调节,通过导轨和驱动结构将控制机器人移动至货物的上方;
12、s2、移动抓取:控制系统根据码垛的位置,控制电机启动,电机带动机器人的抓取结构向下进行移动;
13、s3、进行码垛:控制系统启动抓取结构将货物进行固定,控制系统根据码垛摆放点位置,再次启动导轨和驱动结构进行位置调节,将货物运送到指定的位置,并将货物运送至摆放点的上方完成码垛工作。
14、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
15、1、本发明提供一种码垛工业机器人及其操作方法,通过红外检测器、液压调节杆和防滑板的共同作用下,红外检测器固定安装在固定架的底部,红外检测器能够对物体所在的位置进行检测,检测数据通过数据传输线进行传输送,工业机器人根据检测的位置进行调节,提高了位置调节的便捷性,液压调节杆固定安装在固定架的两侧,液压调节杆能够进行伸缩调节,便于对物体进行夹持,提高了物体固定时的便捷性,防滑板固定连接在液压调节杆的一端,防滑板能够增强摩擦力,减少物体的滑动,提高物体固定时的稳定性。
16、2、本发明提供一种码垛工业机器人及其操作方法,通过自锁电机、回收转盘和钢丝绳的共同作用下,回收转盘转动连接在连接架内部自锁电机固定安装在连接架的一侧,钢丝绳活动连接在回收转盘的底部,使用时自锁电机能够带动回收转盘进行转动,回收转盘转动能够将钢丝绳进行回收,实现固定架的自动升降,便于将物体自动进行提升,减轻了工作人员的工作压力,提高了工作效率。
17、3、本发明提供一种码垛工业机器人及其操作方法,通过移动马达、移动架和滑轮的共同作用下,移动架固定安装在移动板的顶部,移动马达固定安装在移动架的正面,滑轮通过连接轴转动连接在移动架的内部,使用时,移动马达能够带动连接轴进行转动,连接轴转动能够带动滑轮进行转动,滑轮转动能够带动移动板,进行水平调节,便于工业机器人快速调节至物体的正上方,提高了工业机器人的工作效率。
18、4、本发明提供一种码垛工业机器人及其操作方法,通过限位架、计算模块和控制模块的共同作用下,计算模块和控制模块均固定连接在电路板的顶部,计算模块能够对物体所在的位置的路径进行计算,便于工业机器人自动调节至指定位置,控制模块能够根据计算的数据控制驱动结构进行移动实现自动调节,限位架固定安装在连接架的底部,限位架能够对钢丝绳进行限位,提高物体提升时的稳定性。
技术特征:
1.一种码垛工业机器人,包括主体(1),其特征在于:所述主体(1)的底部设置有移动组件(2),所述主体(1)的两端固定安装有安装架(6),所述安装架(6)的一侧设置有螺纹孔(7),所述移动组件(2)包括移动板(21),所述移动板(21)的顶部固定安装有移动架(22),所述移动架(22)的内部转动连接有连接轴(23),所述移动架(22)的内部通过连接轴(23)转动连接有滑轮(24),其中两个所述移动架(22)的一侧固定安装有移动马达(25),所述移动马达(25)的底部固定连接有连接线(26)。
2.根据权利要求1所述的一种码垛工业机器人,其特征在于:所述移动板(21)的顶部设置有控制组件(3),所述控制组件(3)包括控制盒(31),所述控制盒(31)的一侧固定连接有数据线(32),所述控制盒(31)的内部固定安装有电路板(33)。
3.根据权利要求2所述的一种码垛工业机器人,其特征在于:所述电路板(33)的顶部螺纹连接有固定螺栓(34),所述电路板(33)的顶部固定连接有监测模块(35),所述电路板(33)的顶部嵌入安装有计算模块(36),所述电路板(33)的顶部固定连接有控制模块(37)。
4.根据权利要求1所述的一种码垛工业机器人,其特征在于:所述移动板(21)的底部设置有调节组件(4),所述调节组件(4)包括安装板(41),所述安装板(41)固定安装在移动板(21)的底部,所述安装板(41)的顶部设置有安装孔(42)。
5.根据权利要求4所述的一种码垛工业机器人,其特征在于:所述安装板(41)的底部固定安装有连接架(43),所述连接架(43)的内部转动连接有回收转盘(44),所述连接架(43)的一侧固定安装有自锁电机(45),所述自锁电机(45)的输出端固定安装在回收转盘(44)的一侧。
6.根据权利要求5所述的一种码垛工业机器人,其特征在于:所述回收转盘(44)的底部活动连接有钢丝绳(47),所处钢丝绳(47)的底端固定安装有固定圆盘(48),所述连接架(43)的底部固定安装有限位架(46),所述限位架(46)的底部设置有限位孔(49)。
7.根据权利要求6所述的一种码垛工业机器人,其特征在于:所述固定圆盘(48)的底部设置有固定组件(5),所述固定组件(5)包括固定架(51),所述固定架(51)固定安装在固定圆盘(48)的底部,所说固定架(51)的顶部设置有安装槽(58),所述固定架(51)的内部固定安装有红外检测器(52),所述红外检测器(52)的顶部固定连接有橡胶伸缩管(53)。
8.根据权利要求7所述的一种码垛工业机器人,其特征在于:所述橡胶伸缩管(53)的内部贯穿连接有数据传输线(54),所述固定架(51)的两侧均固定安装有液压调节杆(55),所述液压调节杆(55)的一端固定安装有防滑板(56),所述液压调节杆(55)的另一端固定安装有连接管(57)。
9.一种码垛工业机器人操作方法,包括以下步骤,其特征在于:
技术总结
本发明公开了一种码垛工业机器人及其操作方法,涉及工业机器人技术领域,包括主体,所述主体的底部设置有移动组件,所述主体的两端固定安装有安装架,所述安装架的一侧设置有螺纹孔,所述移动组件包括移动板,所述移动板的顶部固定安装有移动架,所述移动架的内部转动连接有连接轴,所述移动架的内部通过连接轴转动连接有滑轮。本发明工业机器人根据检测的位置进行调节,提高了位置调节的便捷性,液压调节杆固定安装在固定架的两侧,液压调节杆能够进行伸缩调节,便于对物体进行夹持,提高了物体固定时的便捷性,防滑板固定连接在液压调节杆的一端,防滑板能够增强摩擦力,减少物体的滑动,提高物体固定时的稳定性。
技术研发人员:郑碎武,乔红,黄剑锋,罗林燊
受保护的技术使用者:惠州中科先进制造有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!