一种多自由度空间环境模拟装置真空容器大门运动机构的制作方法
本发明属于真空设备,具体涉及一种多自由度空间环境模拟装置真空容器大门运动机构。
背景技术:
1、高精度光学遥感器(简称:遥感器)空间环境地面模拟试验设备可以为遥感器提供空间真空低温环境,考核光学遥感器的光学性能随温度的变化,测试遥感器处于温度稳定状态下的光学性能。因此,该类设备对隔振提出很高的要求,需防止外界振动传导至试件平台,导致光学系统成像质量下降,影响测试结果。
2、多自由度空间环境模拟装置真空容器大门运动机构是高精度遥感器空间环境地面模拟试验设备中真空容器的重要组成部分,负责真空容器的大门运动。为了减少外界振动对高精度遥感器地面模拟试验的影响,大门运动机构的必须具备与门框架脱开功能,避免影响遥感器成像质量的检测;同时,必须满足遥感器安全、方便地进出真空容器;此外,还须适满足试验室厂房的空间约束条件。厂房空间较大时,大门转动180°即可完全打开真空容器;厂房空间较小时,受空间限制,大门无法转动至180°,导致大门无法完全打开。
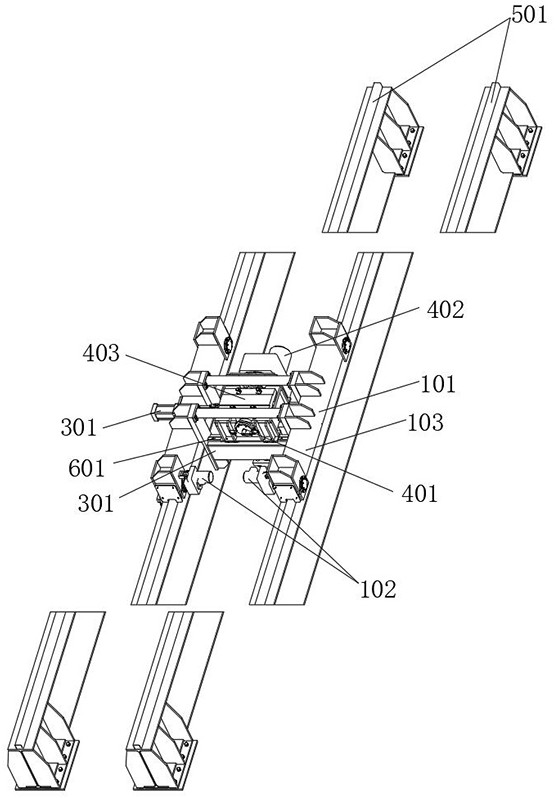
3、为了满足高精度遥感器空间环境地面模拟试验的振动要求,采用整体隔振技术,将φ6500mm×11000mm的真空容器及其大门整体布置在气浮平台(用于阻隔地面微振动的专用平台)上,考虑平台的承制、大门的重量、真空气密性、运动的安全性,将真空容器的大门运动机构布置在地面上,真空非工作状态下,真空容器大门与真空容器是分离的;在工作状态下,真空容器的大门与真空容器合为一体,为试验提供真空环境,此时,需要设计特殊机构使容器大门与其运动机构物理脱开,防止地面的微量扰动经过大门运动机构传导至容器,进而影响遥感器测试,如图1所示。
4、为了满足遥感器安全、方便进出真空容器,真空容器大门必须能够完全打开。该状态下,所需空间宽度不小于13500mm,而试验厂房的跨距为12000mm,显然侧向平移方式无法完全打开容器的大门,需要在平移的过程中符合旋转运动,使容器大门打开后处于容器侧面,如图所示。
5、为了保证真空容器的气密性,真空容器大门在运动过程中,对大门密封圈进行保护,防止刮擦,导致密封圈损伤,影响真空性能。真空容器大门开启时,首先沿真空容器轴正向运动,离开真空容器法兰面20mm;真空容器大门关闭时,首先是大门轴线与容器轴线重合对准重合,再沿真空容器轴反向运动,直至贴合真空容器法兰面。
6、目前,真空容器大门开启机构有侧开平移式、铰链旋转式、法向平开式等比较常见,但是都无法同时满足轴线运动、侧向平动、绕轴旋转、阻断振动的上下平动全部功能。
技术实现思路
1、本发明提供了一种多自由度空间环境模拟装置真空容器大门运动机构,目的在于解决现有多自由度空间环境模拟装置真空容器大门运动机构。
2、为此,本发明采用如下技术方案:
3、一种多自由度空间环境模拟装置真空容器大门运动机构,包括设于真空容器进出口处的支撑组件,支撑组件上设有大门横向平动机构和大门垂直旋转机构;
4、横向为与真空容器进出口端面平行的方向,纵向为与真空容器进出口端面垂直的方向;
5、大门横向平动机构用于带动大门沿横向水平移动,开启时带动大门移至真空容器一侧,闭合时带动大门由一侧移至真空容器进出口正前方;
6、大门垂直旋转机构设于大门横向平动机构上,用于带动大门以竖直方向为轴心转动;开启时,大门沿横向移至真空容器一侧后,大门垂直旋转机构启动并带动大门旋转,使大门与真空容器横向垂直;闭合时,大门垂直旋转机构启动并带动大门旋转,使大门与真空容器横向平行,大门横向平动机构启动将大门由一侧移至真空容器正前方;
7、大门悬吊连接于大门垂直旋转机构的下端。
8、进一步地,还包括大门纵向平动机构,大门纵向平动机构设于大门横向平动机构上,大门垂直旋转机构设于大门纵向平动机构上;
9、大门纵向平动机构用于带动大门沿纵向移动;开启时带动大门向远离真空容器方向移动,使大门与真空容器进出口的接触面脱离;闭合时带动大门向靠近真空容器方向移动,使大门与真空容器进出口的接触面贴合。
10、进一步地,还包括大门垂直解挂机构,大门垂直解挂机构设于大门纵向平动机构上,大门垂直旋转机构挂设于大门垂直解挂机构上;
11、大门垂直解挂机构用于挂设或解挂大门垂直旋转机构,开启时,大门垂直解挂机构向上转动,将大门垂直旋转机构挂设于大门垂直解挂机构上,大门随运动机构移动;关闭时,大门闭合至真空容器上后,大门垂直解挂机构向下转动,使大门垂直旋转机构与大门垂直解挂机构脱离,大门随真空容器起伏移动。
12、进一步地,所述支撑组件包括至少四个竖直支撑柱和四个水平支撑梁,支撑柱和支撑梁连接成框架结构,支撑梁位于顶部且高于真空容器顶面;支撑梁上固定有沿横向布设的第一导轨组。
13、进一步地,所述大门横向平动机构包括大车,大车通过滚轮移动连接于第一导轨组上,大车上连接有驱动大车沿第一导轨组往复移动的第一驱动装置,大车顶部固定连接有沿纵向布设的第二导轨组;
14、所述大门纵向平动机构包括小车,小车通过滚轮移动连接于第二导轨组上,小车上连接有驱动小车沿第二导轨组往复移动的第二驱动装置。
15、进一步地,所述大门垂直解挂机构包括水平设在小车上的驱动轴,驱动轴的两端通过支撑座固定于小车上,驱动轴的一端连接有解挂伺服电机,解挂伺服电机用于带动驱动轴转动,驱动轴中部连接有凸轮;
16、大门垂直旋转机构包括升降板,升降板挂设于凸轮上,驱动轴转动时通过凸轮带动升降板上下移动;升降板四角连接有四根竖直向下的拉杆,拉杆下端固定连接有水平的悬吊板,大门垂直旋转机构连接于悬吊板上。
17、进一步地,所述大门垂直旋转机构包括固定于悬吊板上的旋转伺服电机,旋转伺服电机电机轴竖直向下,旋转伺服电机上连接有吊钩件,吊钩件吊设连接大门。
18、进一步地,所述第一驱动装置包括第一伺服电机、减速器和限位器,限位器设于第一导轨组两端,大车的移动距离不小于大门半径且不大于大门直径。
19、进一步地,所述第二驱动装置包括沿纵向布设的气压推杆,气压推杆底座固定于大车上,气压推杆前端连接小车,气压推杆推动小车往复移动,气压推杆的行程为3~5cm。
20、进一步地,所述气压推杆前端与小车的连接处之间设有沿纵向延伸的间隙。
21、本发明的设计原理如下:
22、(1)大门纵向平动机构由直线轨道、驱动气缸、连接件等组成
23、大门纵向运动采用重载直线轨道,轨道截面呈 “v”字形,在轨道的两端设置机械限位,气缸驱动直线轨道的滑块在纵向运动,滑块带动大门离开或者贴合至真空容器的密封圈。在气缸与滑块的连接处设置连接间隙,消除密封圈的压缩产生额外应力。大门闭合时,气缸轴伸出,驱动大门承载单元连带大门一起前行3~5cm,贴合至容器密封圈。在容器真空环境建立过程中,大门因密封圈的压缩还会前行,该段行程恰好由连接间隙补偿。大门开启时,真空容器内部为大气压,气缸轴缩进,待消除了连接间隙,大门承载单元连同大门一起后移3~5cm,离开容器密封圈。
24、(2)大门横向平动机构由工字梁、大车、限位件、连接件等组成
25、大门横向平动机构采用双工字梁作为承载构件,承担大门及附属机构的重量。大车布置在双工字梁上,其走行机构采用轨道滚轮方式,工字梁顶部布置重载轨道,滚轮在轨道上滚动,带动大车及大门一起做横向平动。驱动装置采用第一伺服电机和减速机,增加驱动力矩、减小直线运动速度,使大门能够安全平稳开闭。限位件布置在大门的零点位置和极限最大开启位置,检测及控制大门的开到位和关到位。
26、(3)大门垂直旋转机构有升降板、悬吊板、限位件和连接件组成
27、大门横向平移完全开启所需空间尺寸等于大门质心的位移与大门1/2直径的总和,超过了容器侧壁到试验室墙面的空间尺寸,需要旋转机构驱动大门在侧移平开的过程中旋转90°,使大门轴线与容器轴线呈垂直状态。回转支撑盘是典型的蜗轮蜗杆机构,在伺服电机的驱动下,涡轮旋转带动大门旋转,实现大门90°旋转的目的,解决了空间受限问题。
28、(4)大门垂直解挂机构
29、大门垂直解挂机构由驱动轴、凸轮、伺服电机、大门托架、限位件和连接件组成。凸轮安装在驱动轴上,伺服电机驱动凸轮轴转动,凸轮随之转动,凸轮的升程为15mm,待真空容器的真空建立后,凸轮在伺服电机的驱动下转向180°,凸轮高点下降15mm,而容器大门在大气压作用下,与真空容器形成一体不会下降,那么大门吊挂机构与大门脱开,完成脱挂动作,真空容器与门吊完全脱开,此时真空容器整体就在气浮平台上,处于隔振状态。
30、本发明的有益效果在于:
31、1. 大门纵向平动机构实现真空容器大门与容器密封圈的分离和贴合作用,有效防止大门外延刮擦密封圈,导致密封圈损坏,影响真空密封性能;
32、2. 大门横向平动机构实现了真空容器大门安全、稳定打开功能,方便遥感器进出;
33、3. 大门垂直旋转机构实现了真空容器大门旋转90°的功能,节省了大门开启的空间,降低了试验室的空间需求;配合大门侧向平移机构,实现了真空容器大门完全打开的功能要求;
34、4. 大门垂直解挂机构实现了在真空状态下,大门与容器组成了整体单元,且与门吊框架完全脱开,物理阻断了外界振动对容器整体的干扰,保障了遥感器成像质量的检测。
- 还没有人留言评论。精彩留言会获得点赞!