一种智能轨枕运输系统及运输方法与流程
本发明属于轨枕运输设计,尤其涉及一种智能轨枕运输系统及运输方法。
背景技术:
1、在城市轨道交通站后工程建设领域,由于隧道空间狭小,地铁轨排都是在地上铺轨基地进行拼装,工人将轨枕、钢轨和不同扣件拼装成25m长的轨排,然后运到隧道内进行铺设。轨枕放置在物料仓库,当开始轨排拼装施工,现场需要将轨枕从物料仓库运到铺轨基地,并按照一定的间距摆放好轨枕。现有技术1(cn202222094699.5)公开了一种ⅲa型号轨枕运输装置,主要由支撑座、滑轨以及运输板组合而成,根据需要任意拼接,能够对轨枕进行短距离运输,但是该装置采用人工作为动力源,效率低,劳动强度大。现有技术2(cn202122962547.8)公开了一种轨枕铺设装置,包括随车起重机、轨枕组合抓具,能够进行轨枕铺设,但是该装置需要与轨枕运输车配合使用,智能化程度低。为了解决上述问题,本发明设计了一种智能轨枕运输系统及运输方法。
技术实现思路
1、针对现有技术中存在的不足,本发明提供了一种智能轨枕运输系统及运输方法,解决了传统的铺轨基地轨枕摆放效率低下、智能化程度不高等问题。
2、本发明通过以下技术手段实现上述技术目的。
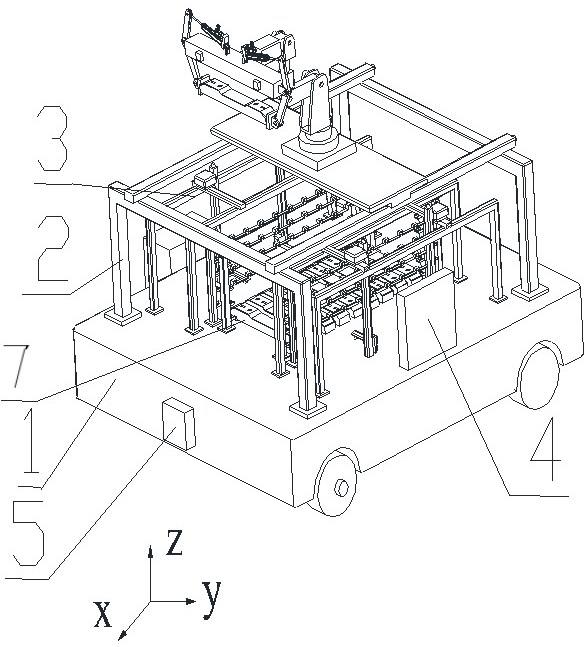
3、一种智能轨枕运输系统,包括轨枕运输车以及安装在轨枕运输车上的轨枕搬运机器人模块、轨枕存储模块、路径模块、智能定位模块、综合管理模块、外壳模块;轨枕运输车、轨枕搬运机器人模块、轨枕存储模块、路径模块、智能定位模块均与综合管理模块信号连接,受其控制、传递各项数据信息;轨枕搬运机器人模块包括可移动底座,可移动底座的底座a安装在轨枕运输车车体上,底座a上对称安装有滑台机构a,两个滑台机构a的滑块a之间安装有机械臂托盘,机械臂托盘上安装有六自由度机械臂,六自由度机械臂末端安装有轨枕夹爪。
4、进一步地,所述轨枕夹爪包括安装在六自由度机械臂末端的夹爪体,夹爪体上安装有工业相机,夹爪体上还通过销轴铰接有两个电推缸,两个电推缸的伸缩端均通过销轴与对应的夹爪杆铰接,夹爪杆中部均通过销轴与对应的夹爪体铰接,夹爪杆另一端均通过销轴与对应的夹爪头铰接。
5、进一步地,所述轨枕存储模块位于六自由度机械臂下方,包括轨枕存储库、轨枕垫板存储库、轨枕垫板机器人,轨枕存储库与轨枕垫板存储库结构及安装方式均相同;轨枕垫板存储库包括四根安装在车体上的竖向架体,同侧相对的两根竖向架体的侧边均沿高度方向设置有多排用于放置轨枕垫板的凹槽结构;轨枕垫板事先存储在轨枕垫板存储库中,轨枕垫板为长条状且带有多个凹槽,轨枕垫板上的凹槽尺寸与轨枕相匹配,用于卡接放置轨枕;轨枕存储库的凹槽、轨枕垫板存储库的凹槽与轨枕垫板的对应关系存储在综合管理模块的数据库中。
6、进一步地,两个所述轨枕垫板机器人分别对称布置在轨枕垫板存储库外侧,轨枕垫板机器人包括安装在车体上的底座b,底座b顶部安装有滑台机构b,滑台机构b的滑块b上安装有滑台机构c,滑台机构c的滑块c上安装有吸爪体,吸爪体下表面安装有用于吸取轨枕垫板的电磁铁。
7、进一步地,所述路径模块包括安装在服务器中的bim子模块和路径输入子模块,bim子模块用于接收bim模型,提取模型信息,操作人员根据bim模型信息,通过综合管理模块的人机交互子模块在路径输入子模块中输入路径信息,生成轨枕运输车从起始点至目的地的执行命令。
8、进一步地,所述智能定位模块包括定位算法子模块、高清摄像机、六轴倾角传感器、标记块,定位算法子模块安装在服务器中,高清摄像机、六轴倾角传感器安装在车体上,标记块摆放在施工现场,标记块的位置通过bim子模块标记在bim模型中;高清摄像机用于识别标记块,并将识别信息发送至服务器中的定位算法子模块进行分析处理,六轴倾角传感器用于测量轨枕运输车沿空间三维的转动角度,并将测量数据发送至定位算法子模块,定位算法子模块按照定位算法生成轨枕运输系统位置信息并发送至综合管理模块。
9、进一步地,所述轨枕运输车的车体安装在车轮组件上,车轮组件上还安装有用于测量车轮转速的测速电机,车体上还安装有用于为智能轨枕运输系统提供动力的电池组件。
10、进一步地,所述综合管理模块是轨枕运输系统的中央控制系统,安装在一台服务器上,包括模块协调处理子模块、人机交互子模块、数据库子模块;模块协调处理子模块实现对各模块的协调调用,收集处理各个模块的数据;人机交互子模块的功能包括输入任务命令、显示各个模块信息、显示工作日志、报警;数据库子模块的功能包括采集、存储运行数据、调用数据库信息、智能分析、记录、保存数据。
11、一种利用上述智能轨枕运输系统的智能轨枕运输方法,包括如下过程:
12、步骤1:现场操作人员将施工现场相关bim模型输入到bim子模块,轨枕运输系统位于标定好的初始位置,该初始位置为施工现场坐标下原点和bim模型原点;操作人员根据可视化的bim模型,在路径输入子模块中输入路径信息,路径模块生成运动命令,发送到综合管理模块,综合管理模块控制轨枕运输车运动到轨枕仓库;
13、步骤2:轨枕运输车到达轨枕仓库后,轨枕运输系统开始抓取轨枕至轨枕存储库前方,具体过程如下:
14、步骤2.1:综合管理模块从数据库中调出轨枕垫板存储库中第一层轨枕垫板位姿数据,控制滑台机构b和滑台机构c运动,将吸爪的电磁铁下端面接触该轨枕垫板,综合管理模块控制电磁铁通电,吸爪吸住轨枕垫板;综合管理模块调取数据库中轨枕存储库中第一层凹槽的位置坐标,通过吸爪将轨枕垫板吸住并放置到对应凹槽内,然后控制电磁铁断电,松开轨枕垫板,轨枕存储库中第一层轨枕垫板安装完成;
15、步骤2.2:工业相机扫描轨枕仓库的轨枕及其周围环境,生成三维点云数据并传递至综合管理模块,综合管理模块分析处理后与数据库中轨枕的模型对比,提取出轨枕空间位姿数据,将与轨枕运输车距离最小且其上部无物体的轨枕作为目标轨枕;根据目标轨枕的空间位姿,计算出六自由度机械臂各关节的目标位姿信息和可移动底座的滑台机构a目标位姿信息并进行运动控制;
16、步骤2.3:六自由度机械臂和可移动底座运动到目标位置后,综合管理平台控制轨枕夹爪的电推缸伸出,夹爪头与轨枕侧面贴合,当电推缸反馈的力超过设定的阈值时完成夹紧轨枕操作;
17、步骤2.4:综合管理模块将第一个轨枕存储位置设定为目标位置,计算出六自由度机械臂各关节的目标位姿信息和可移动底座的滑台机构a的运动信息并进行运动控制,将轨枕放置到轨枕存储库第一层轨枕垫板上的凹槽中;
18、步骤2.5:放置到位后,综合管理平台控制轨枕夹爪的电推缸缩回,当电推缸反馈的力小于设定的阈值时轨枕夹爪完成放开轨枕操作;
19、步骤2.6:六自由度机械臂、可移动底座和轨枕夹回到初始位置,完成第一层第一个轨枕存储工作;
20、步骤2.7:重复步骤2.2~步骤2.6多次,直至完成第一层轨枕的存储工作;
21、步骤2.8:重复步骤2.1~步骤2.6,完成第二层第一个轨枕的存储工作;
22、步骤2.9:重复步骤2.2~步骤2.6多次,直至完成第二层轨枕的存储工作;
23、步骤2.10:重复步骤2.8~步骤2.9,依次完成其余层轨枕的存储工作;
24、步骤2.11:综合管理模块控制轨枕搬运机器人模块和轨枕存储模块回到设定的运输位置;
25、步骤3:综合管理模块按照路径模块生成的运动命令,控制轨枕运输车运动到轨排拼装区;
26、步骤4:综合管理模块控制轨枕运输系统将轨枕摆放在拼装位置,具体过程如下:
27、步骤4.1:工业相机扫描放置在轨排拼装区的标记块及其周围环境,生成三维点云数据并传递至综合管理模块,综合管理模块分析处理后与数据库中标记块的模型对比,提取出标记块空间位姿数据;
28、步骤4.2:综合管理模块调取数据库中标记块与轨排拼装区轨枕之间的关系,计算出所有轨枕的摆放空间位姿;
29、步骤4.3:综合管理模块调取数据库中轨枕存储库顶层轨枕的空间位姿,选取顶层中的一个轨枕作为目标轨枕,根据目标轨枕的空间位姿,计算出六自由度机械臂各关节和滑台机构a的目标位姿信息并进行运动控制,运动到位后进一步控制轨枕夹爪的电推缸伸出,夹紧目标轨枕;
30、步骤4.4:综合管理模块将轨排拼装区的第一个轨枕的摆放空间位姿作为目标位姿,计算出六自由度机械臂各关节的目标位姿信息、滑台机构a的运动信息和轨枕运输车的运动信息,进行运动控制;
31、步骤4.5:六自由度机械臂、可移动底座和轨枕运输车带动目标轨枕到达目标位姿后,控制轨枕夹爪松开,放下轨枕;
32、步骤4.6:六自由度机械臂、可移动底座和轨枕夹爪回到初始位置,单个轨枕的摆放工作完成;
33、步骤4.7:重复步骤4.3~步骤4.6多次,直至轨枕存储库顶层所有轨枕摆放完成;
34、步骤4.8:综合管理模块调取数据库中轨枕存储库中顶层的两块轨枕垫板的位姿数据作为目标位姿,控制滑台机构b和滑台机构c运动,利用吸爪吸住轨道垫板;
35、步骤4.9:综合管理模块调取数据库中轨枕垫板存储库第一层凹槽的位置坐标作为目标位置,控制滑台机构b和滑台机构c运动,将两块轨枕垫板分别放置到左右轨枕垫板存储库对应凹槽内,然后控制吸爪松开轨枕垫板;
36、步骤4.10:重复步骤4.3~步骤4.6多次,直至轨枕存储库中下一层所有轨枕摆放完成;
37、步骤4.11:重复步骤4.8~步骤4.9,将轨枕存储库中下一层的两块轨枕垫板重新放置回轨枕垫板存储库中;
38、步骤4.12:重复步骤4.10~步骤4.11多次,将轨枕存储库中所有轨枕摆放完成,同时将轨枕存储库中所有轨枕垫板重新放置回轨枕垫板存储库中;
39、步骤4.13:综合管理模块控制轨枕搬运机器人模块和轨枕存储模块回到设定的初始位置;
40、步骤5:轨枕运输系统完成将单个轨排拼装所需的所有轨枕摆放到轨排拼装区指定位置,现场人员将轨排拼装完成并运走后,轨枕运输系统重复以上步骤2~步骤4的流程,将新的轨枕从物料库运输到轨排拼装区并摆放到轨排拼装区指定位置。
41、进一步地,所述轨枕运输车行走过程中,智能定位模块实时定位轨枕运输系统在施工现场的位置坐标和在bim模型中的位置坐标,发送到综合管理模块,综合管理模块根据位置坐标,更新运动命令。
42、本发明具有如下有益效果:
43、本发明针对传统的铺轨基地轨枕运输效率低、智能化程度不高等问题,设计了智能化轨枕运输系统及运输方法,自动化程度更高,能够自动进行轨枕的取货、运输以及摆放工作,能够单次运输一根轨排的所有轨枕,并将轨枕高精度放置在组装位置,作业效率和精度高,提升了城市轨道交通站后工程施工的智能化、自动化水平,提高了施工精度、效率和安全性,降低了人力投入和成本。
- 还没有人留言评论。精彩留言会获得点赞!