起重机控制方法、装置、电子设备和可读存储介质与流程
本发明涉及模型参考自适应控制,尤其是涉及一种起重机控制方法、装置、电子设备和可读存储介质。
背景技术:
1、随着港口贸易的迅速发展,轮胎式集装箱龙门起重机(rtg,rubber tyre gantry)起重机的作业效率成为至关重要的技术指标。起重机的主要控制目标是精准的吊具轨迹跟随,同时吊具摆角尽可能小,从而使吊具能在最短时间内达到目标位置。大多数的rtg在快速移动吊具后,一旦突然停下来都会造成吊具的大幅摆动。如果摆动过于剧烈,司机需要暂时停止吊具的移动直到摆动停止。这都会影响起重机的效率。操作工人可以通过调整吊具的移动速度来降低其摆动幅度,但是这一过程耗时,大大降低了rtg作业效率。只有经验丰富的操作工人才能在快速移动吊具的同时,尽可能降低吊具的摆幅。统计数据表明,由于吊具的摆动,传统的rtg设备增加了30%的作业时间。另外,rtg作业过程中,摆动的吊具有可能会碰撞周围的人或者物品,造成施工事故。
2、由于起重机是欠驱动系统,加上系统的复杂性,控制策略的设计一直以来都是个难题。起重机的稳定性受到负载振动和小车运动的影响。而小车和负载的振动是非线性关系并且二者高度耦合。并且风和一些不确定因素作为外扰也能影响起重机的性能。这些不确定因素通常包括未知的摩擦力、小车质量、负载质量和绳长。由于起重机的阻尼通常很小,因此系统的任何暂态响应一般持续较长的时间。另外,绳索、挂钩和吊具组件的契合度都会影响这个复杂系统的动力学性能。
3、为了降低rtg作业过程中的摆动,行业内采用了各种控制方法。开环方法,如环路整形、无限冲激响应(iir)和有限冲激响应(fir),试图在没有反馈的情况下调节起重机运动。另一方面,闭环方法,包括比例积分微分(pid)、线性二次调节器(lqr)和模型预测控制(mpc),利用反馈以提高系统性能。尽管这些控制策略广泛应用,但每种方法在应用于rtg起重机防摆控制时都表现出固有的局限性。
4、开环控制方法,如环路整形、无限脉冲响应(iir)和有限脉冲响应(fir)滤波器,具有以下缺点。首先,它们对参数变化敏感。如果起重机系统的参数发生变化,开环控制系统将无法适应起重机系统中的动态变化,导致在面对不确定性时性能不佳。其次,开环控制系统无法补偿扰动,如风或不平整的地面。闭环方法中,pid控制器虽然被广泛使用,但在负载变化或外部干扰存在的情况下,难以适应rtg起重机的不断变化的动态。lqr在某些应用中效果显著,但对建模不准确性敏感,面对不确定性时可能导致性能不佳。同时,单独使用pid或者lqr难以达到同时控制小车位置以及抑摆的良好的控制效果,而要将两种方法分别结合其他的算法来提升控制效果。mpc具有预测能力,但其依赖于准确的模型和计算密集型的性质可能阻碍在rtg起重机动态环境中的实时响应。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种起重机控制方法、装置、电子设备和可读存储介质,具有高效的吊具定位和防摇性能。
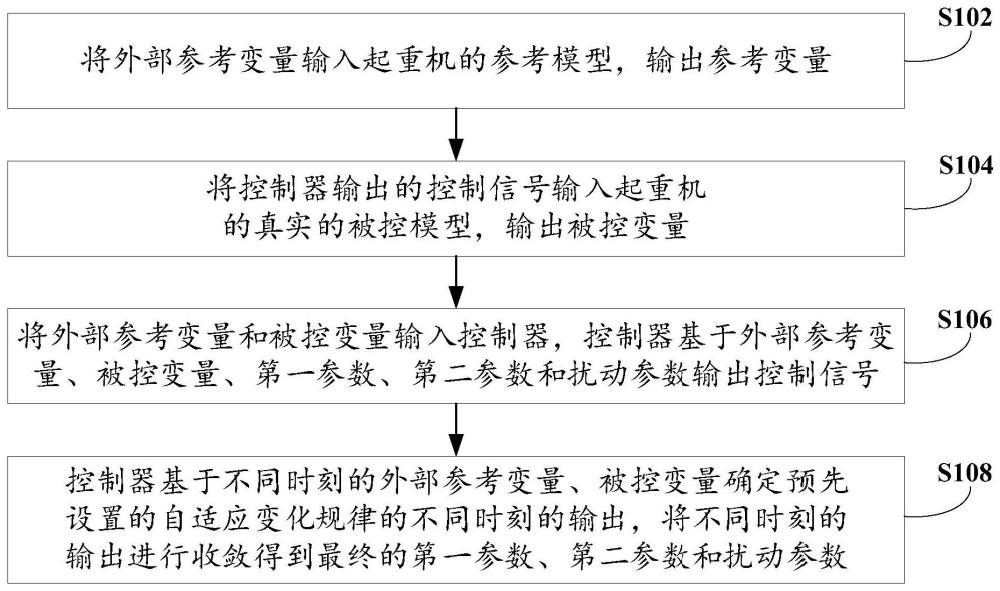
2、第一方面,本发明实施例提供了一种起重机控制方法,方法包括:将外部参考变量输入起重机的参考模型,输出参考变量;将控制器输出的控制信号输入起重机的真实的被控模型,输出被控变量;将外部参考变量和被控变量输入控制器,控制器基于外部参考变量、被控变量、第一参数、第二参数和扰动参数输出控制信号;控制器基于不同时刻的外部参考变量、被控变量确定预先设置的自适应变化规律的不同时刻的输出,将不同时刻的输出进行收敛得到最终的第一参数、第二参数和扰动参数。
3、在本技术可选的实施例中,上述方法还包括:基于最终的第一参数和第二参数确定参考模型中的最终的参数。
4、在本技术可选的实施例中,上述起重机包括吊具和车辆;方法还包括:确定用于表征车辆的水平运动和吊具的周向摆动的非线性动力学模型;将非线性动力学模型进行近似处理,得到线性模型作为起重机结构的参考模型。
5、在本技术可选的实施例中,上述将控制器输出的控制信号输入起重机的真实的被控模型,输出被控变量的步骤,包括:将控制器输出的当前时刻的控制信号输入起重机的真实的被控模型,被控模型基于当前时刻的被控变量和当前时刻的控制信号确定下一时刻的被控变量。
6、在本技术可选的实施例中,上述将外部参考变量和被控变量输入控制器,控制器基于外部参考变量、被控变量、第一参数、第二参数和扰动参数输出控制信号的步骤,包括:将当前时刻的外部参考变量和当前时刻的被控变量输入控制器,控制器基于当前时刻的外部参考变量、当前时刻的被控变量、当前时刻的第一参数、当前时刻的第二参数和当前时刻的扰动参数输出当前时刻的控制信号。
7、在本技术可选的实施例中,上述将外部参考变量输入起重机的参考模型,输出参考变量的步骤,包括:将当前时刻的外部参考变量输入起重机的参考模型,输出当前时刻的参考变量。
8、在本技术可选的实施例中,上述控制器基于不同时刻的外部参考变量、被控变量确定预先设置的自适应变化规律的不同时刻的输出量的步骤,包括:控制器将不同时刻的外部参考变量和被控变量的差值作为不同时刻的状态差;控制器基于不同时刻的状态差确定预先设置的自适应变化规律的不同时刻的输出量。
9、第二方面,本发明实施例还提供一种起重机控制装置,装置包括:参考变量输出模块,用于将外部参考变量输入起重机的参考模型,输出参考变量;被控变量输出模块,用于将控制器输出的控制信号输入起重机的真实的被控模型,输出被控变量;控制信号输出模块,用于将外部参考变量和被控变量输入控制器,控制器基于外部参考变量、被控变量、第一参数、第二参数和扰动参数输出控制信号;参数调整模块,用于控制器基于不同时刻的外部参考变量、被控变量确定预先设置的自适应变化规律的不同时刻的输出,将不同时刻的输出进行收敛得到最终的第一参数、第二参数和扰动参数。
10、第三方面,本发明实施例还提供了一种电子设备,包括处理器和存储器,该存储器存储有能够被该处理器执行的计算机可执行指令,该处理器执行该计算机可执行指令以实现上述起重机控制方法。
11、第四方面,本发明实施例还提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机可执行指令,该计算机可执行指令在被处理器调用和执行时,计算机可执行指令促使处理器实现上述起重机控制方法。
12、本发明实施例带来了以下有益效果:
13、本发明实施例提供了一种起重机控制方法、装置、电子设备和可读存储介质,将外部参考变量输入起重机的参考模型,输出参考变量;将控制器输出的控制信号输入起重机的真实的被控模型,输出被控变量;将外部参考变量和被控变量输入控制器,控制器基于外部参考变量、被控变量、第一参数、第二参数和扰动参数输出控制信号;控制器基于不同时刻的外部参考变量、被控变量确定预先设置的自适应变化规律的不同时刻的输出,将不同时刻的输出进行收敛得到最终的第一参数、第二参数和扰动参数。该方式中,可以确保在不确定性和干扰存在的情况下实现优越的抗摆性能,有效减轻起重机的摆动,提供了一种在鲁棒性、自适应性、时变性以及处理非线性被控对象上很强的解决方案,具有高效的吊具定位和防摇性能。
14、本公开的其他特征和优点将在随后的说明书中阐述,或者,部分特征和优点可以从说明书推知或毫无疑义地确定,或者通过实施本公开的上述技术即可得知。
15、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!