地库搬运施工的机械臂的制作方法
本发明涉及建筑地库施工领域,具体涉及一种地库搬运施工的机械臂。
背景技术:
1、目前进行建筑施工时,特别是大型地库工程,在工程施工过程中需要用到大量的建筑材料,如建筑管材(如pvc管)、成捆的钢筋等,在进行搬运时如果使用人工或者小型推车等传统方式,难以满足使用需求,为此传统的方式一般是在地库布置塔吊结构,塔吊需穿越基础底板及顶板,此种塔吊设置方式不仅对塔吊运行安全要求高,而且对地库渗漏水也会产生影响;另外一种做法是利用格构柱将塔吊基础悬空设置在地库顶板以上,但此种做法成本较高,后期塔吊基础破除难度较大,而且由于是大型地库,如需满足施工进度则需要在多个位置布置塔吊,成本高昂;同时对于建筑管材而言,传统的塔吊进行搬运时还需要对管材进行专门的捆绑定位后,再进行搬运,操作繁琐,影响施工周期。
2、因此,为解决以上问题,需要一种地库搬运施工的机械臂,便于地库施工时进行建筑管材搬运。
技术实现思路
1、有鉴于此,本技术方案的地库搬运施工的机械臂,通过夹持机构实现对施工中需要用到的建筑管材进行抓取后搬运,整体结构简单,搬运方便可靠,节约生产成本同时加快了施工周期。
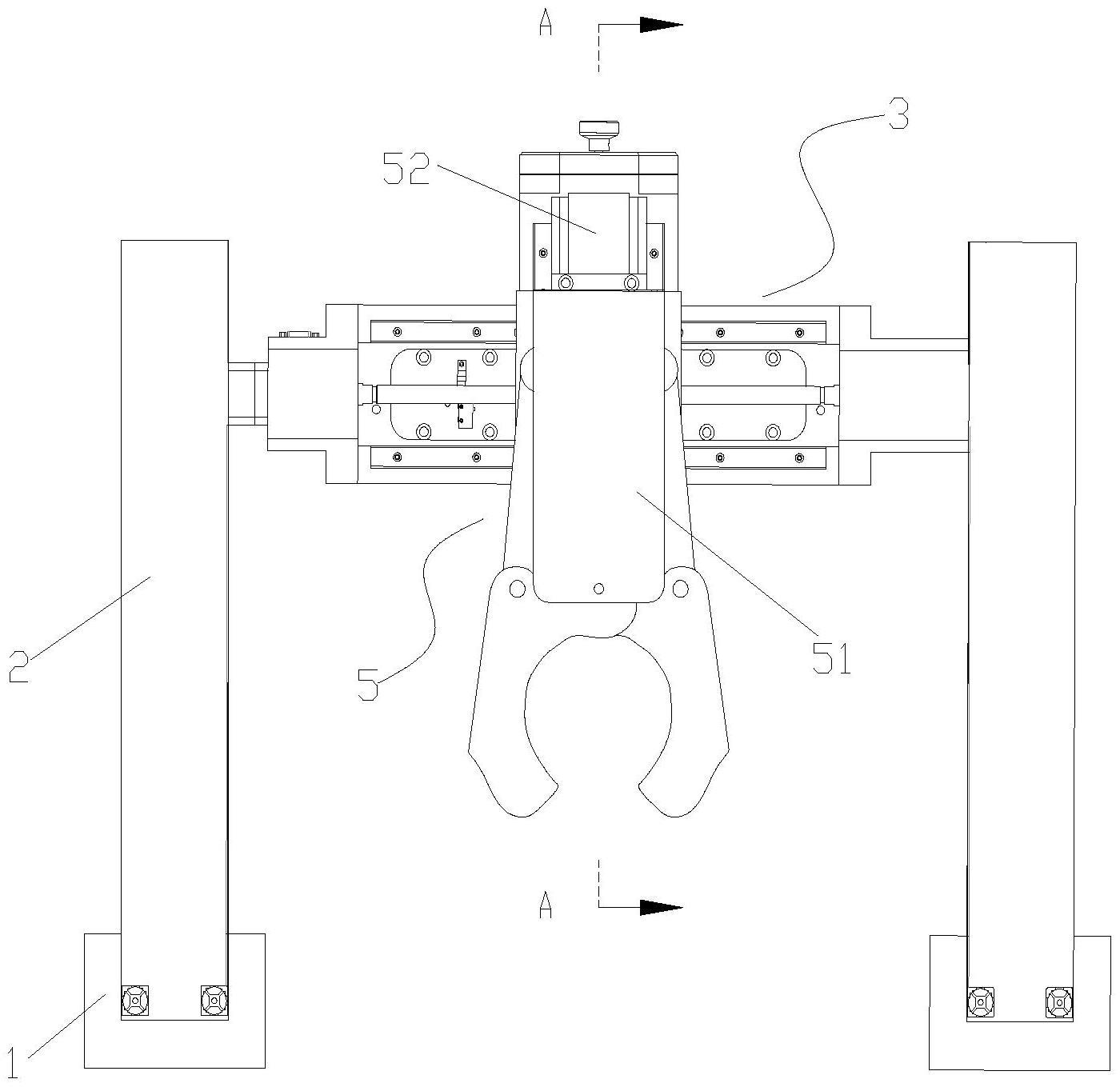
2、一种地库搬运施工的机械臂,包括安装于位置调节机构上的夹持机构;所述夹持机构安装于位置调节机构上并可沿水平和竖直方向进行调节;所述夹持机构包括与位置调节机构连接安装的定位支架、穿设于定位支架上的夹持丝杆、与夹持丝杆配合使用的螺母套、与螺母套固定连接设置的连杆组件以及安装于连杆组件下端的夹爪组件,所述连杆组件运动带动夹爪组件进行抓取或释放。
3、进一步,所述连杆组件包括与螺母套固定连接设置的横向连杆、与横向连杆左端铰接安装的左连杆以及与横向连杆右端铰接安装的右连杆,所述左连杆和右连杆相对与夹持丝杆对称布置,所述横向连杆沿竖直方向运动带动左连杆和右连杆运动进而驱动夹爪组件夹持或松开。
4、进一步,所述夹爪组件包括铰接于左连杆下端的左夹爪以及铰接于右连杆下端的右夹爪,所述左夹爪和右夹爪结构相同且左夹爪和右夹爪中部均铰接安装于定位支架上。
5、进一步,还包括第二左夹爪,所述第二左夹爪与左夹爪结构相同,所述右夹爪布置与左夹爪与第二左夹爪之间。
6、进一步,所述定位支架上安装有用于驱动夹持丝杆转动的夹持驱动电机。
7、本发明的有益效果是:本技术方案的地库搬运施工的机械臂,通过夹持机构实现对施工中需要用到的建筑管材进行抓取后搬运,整体结构简单,搬运方便可靠,节约生产成本同时加快了施工周期。
技术特征:
1.一种地库搬运施工的机械臂,其特征在于:包括安装于位置调节机构上的夹持机构;所述夹持机构安装于位置调节机构上并可沿水平和竖直方向进行调节;所述夹持机构包括与位置调节机构连接安装的定位支架、穿设于定位支架上的夹持丝杆、与夹持丝杆配合使用的螺母套、与螺母套固定连接设置的连杆组件以及安装于连杆组件下端的夹爪组件,所述连杆组件运动带动夹爪组件进行抓取或释放。
2.根据权利要求1所述的地库搬运施工的机械臂,其特征在于:所述连杆组件包括与螺母套固定连接设置的横向连杆、与横向连杆左端铰接安装的左连杆以及与横向连杆右端铰接安装的右连杆,所述左连杆和右连杆相对与夹持丝杆对称布置,所述横向连杆沿竖直方向运动带动左连杆和右连杆运动进而驱动夹爪组件夹持或松开。
3.根据权利要求2所述的地库搬运施工的机械臂,其特征在于:所述夹爪组件包括铰接于左连杆下端的左夹爪以及铰接于右连杆下端的右夹爪,所述左夹爪和右夹爪结构相同且左夹爪和右夹爪中部均铰接安装于定位支架上。
4.根据权利要求3所述的地库搬运施工的机械臂,其特征在于:还包括第二左夹爪,所述第二左夹爪与左夹爪结构相同,所述右夹爪布置与左夹爪与第二左夹爪之间。
5.根据权利要求4所述的地库搬运施工的机械臂,其特征在于:所述定位支架上安装有用于驱动夹持丝杆转动的夹持驱动电机。
技术总结
本发明公开了一种地库搬运施工的机械臂,包括安装于位置调节机构上的夹持机构;所述夹持机构安装于位置调节机构上并可沿水平和竖直方向进行调节;所述夹持机构包括与位置调节机构连接安装的定位支架、穿设于定位支架上的夹持丝杆、与夹持丝杆配合使用的螺母套、与螺母套固定连接设置的连杆组件以及安装于连杆组件下端的夹爪组件,所述连杆组件运动带动夹爪组件进行抓取或释放;本技术方案的地库搬运施工的机械臂,通过夹持机构实现对施工中需要用到的建筑管材进行抓取后搬运,整体结构简单,搬运方便可靠,节约生产成本同时加快了施工周期。
技术研发人员:王鹏,武仁民
受保护的技术使用者:中冶建工集团(天津)建设工程有限公司
技术研发日:20230331
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!