一种自动扶梯实时立体防护方法及系统与流程
本发明涉及自动扶梯安全防护领域,特别是一种自动扶梯实时立体防护方法及系统。
背景技术:
1、自动扶梯是生活中的常见设施,为人们上下楼提供了便利。但自动扶梯运行过程中也出现了一些安全事故,造成乘客人身伤害和财产损失。自动扶梯存在的安全风险隐患包括以下几个方面:
2、(1)自动扶梯本身的安全问题
3、a.机械故障:自动扶梯的驱动系统、传动装置、控制装置等机械部件可能出现故障,导致扶梯无法正常运行,甚至停止运行。
4、b.电气故障:自动扶梯的电气控制系统、电机、电源等电气部件可能出现故障,导致扶梯无法正常运行,甚至出现电击等安全事故。
5、c.防护装置不足或不规范:自动扶梯的防护装置如急停开关、安全带、防护栏等可能存在不足或不规范,导致乘客受伤或发生其他安全事故。
6、d.超载运行:自动扶梯在超载情况下运行容易导致扶梯机械部件损坏,从而引发安全事故。
7、(2)乘客不规范行为的安全问题
8、a.不正确使用扶梯:乘客不正确使用扶梯容易导致摔倒或受伤。例如,乘客在扶梯上行走或奔跑,或者站在扶梯侧面等不安全位置上。
9、b.乘客不注意孩子或老年人的安全:孩子或老年人在乘坐扶梯时需要更多的关注和保护,但乘客往往没有注意到他们的安全,导致孩子或老年人受伤或发生其他安全事故。
10、c.乘客不遵守规定:乘客不遵守规定,如携带大型行李、推婴儿车等,容易影响扶梯的正常运行,甚至引发安全事故。
11、自动扶梯现有安全防护装置主要有:防夹装置、防爬装置、阻挡装置、防滑行装置、防护挡板、紧急停止装置、扶手带入口保护装置、梳齿板保护装置、检修盖板和楼层板盖板保护装置、超速保护装置、非操纵逆转保护装置、梯级的驱动元件保护装置、驱动装置与转向装置之间的距离缩短保护装置、梯级的下陷保护装置、梯级的缺失保护装置、扶手带速度偏离保护装置等,这些装置较好的保护了乘客的健康,但仍有一些安全事故的发生。主要原因是这些防护装置没有形成立体实时的防护系统,例如紧急停止开需要人为操作、时效性不高,紧急情况下无法及时做出反应。这些装置没有主动识别乘客行为,无法预测和识别风险。对自动扶梯梯级本身安全性和承载情况感知不够细致。预警提示和告警信息不充分。各类传感器信息没有形成融合性决策,安全防护效益没有发挥到最大。
技术实现思路
1、本发明的目的在于解决上述现有技术中存在的难题,提供一种自动扶梯实时立体防护方法,包含步骤s1:基于图像识别的乘员识别和行为检测;包含扶梯顶部ip相机视频流识别,以及电扶梯入口处的带双目摄像头的智能终端判断出入口的异常行为;
2、步骤s2:通过视频分析,统计乘坐扶梯人员数量,计算当前人流密度,并判断是否超出最大运输能力,以及人员的调度;
3、步骤s3:通过多个摄像头和传感器判断摔倒,夹脚,梯级检测;分析各个梯级对电梯支撑框架的压力,判断人员在自动扶梯上站立分布情况,分析各个梯级是否超出最大承载力;通过监测梯级压力的变化情况,分析是否有乘客跌倒的情况;
4、步骤s4:分析梯级之间的间隙是否正常、梯级是否损坏,判断是否有异物卷入梯级之间;在电梯梳齿板处有两边对射的摄像头,通过视频分析来判断梯级损坏、异物、穿洞洞鞋,长裙任一项或多项容易造成卷入梯级造成的危险情况;
5、步骤s5:从控制柜读取扶梯故障状态;扶手带检测,通过扶手带光电传感器检测扶手带上裂纹异常;
6、步骤s6:结合所述步骤s1至步骤s5,采用基于规则的安全防护方法进行判断。
7、优选的,所述步骤s1进一步包括:
8、所述图像识别包含风险因素识别、风险行为识别、异常装置识别。
9、优选的,所述乘坐扶梯人员数量按下述方法进行计算,设电梯长度为l,运行速度为v,在t时刻,进入端计数为i(t),出口端计数为o(t);则t时刻,在自动扶梯上的人数np(t)为
10、
11、结合梯级压力传感器分析每个梯级的承载情况。
12、优选的,在分析是否有乘客跌倒的情况时,结合摄像头乘客行为识别结果进行判断;根据自动扶梯梯级压力变化异常,确定该时刻梯级压力传感器位置;
13、根据该位置确定监控该区域的摄像头的位置,对摄像头信息进行分析,判断是否有跳跃、走动行为;
14、如果有,则排除异常,不进行报警,否则发出人员摔倒告警信息;
15、如某个梯级压力较大,并按照电梯运行方向均匀变化,说明该梯级站立人数或物品较多,需要提醒乘客注意安全,必要时可以降低电梯运行速度。
16、优选的,当监控摄像头识别有儿童乘坐/大件行李情况下,不需要进行融合,决策结果为采用声光告警发出提示音看管好儿童/拿好大件行李;
17、当监控摄像头识别结果为有人在电梯上走动时,不需要进行融合,决策结果为声光告警发出提示音站稳;
18、当监控摄像头识别有人摔倒时,需要进行融合,融合压力传感器数值,排除正常蹲下动作,觉得结果为声光告警提示音,有序疏散、报警灯闪亮,应急执行为电梯停止,人员操作为通知值班人;
19、当乘员进出光电传感器识别结果为乘坐电梯人流量大时,需要进行融合,融合电梯运行参数,排除电梯故障问题,声光告警发出提示音,人多拥挤、注意安全,无需进行应急执行,人员操作为通知值班人员限制人流量;
20、梯级压力传感识别结果为压力分布不均,个别梯级压力大时,需要进行融合,融合扶梯梯级光电传感器信息,排除梯级故障,声光告警结果为分散站立;
21、当扶手带光电传感器识别结果为扶手带存在安全风险时,无需进行融合,应急执行为降低运行速度,人员操作为通知值班人员查看,做出处理。
22、优选的,步骤s6进一步包括针对多传感器数据融合进行决策,基于ds证据理论的融合方法,以监控摄像头和梯级压力传感器融合识别行人摔倒的情况,具体方法如下:
23、确定融合传感器类型和假设辨识框架,融合的传感器为监控摄像头和梯级压力传感器,辨识框架ω={ω1,ω2,...,ωn},如{摔倒,弯腰,下蹲,遮挡};
24、建立基本概论分配表,以两种传感器融合为例,各个传感器给出的识别结果都是以概率形式给出,基于ds证据理论对传感器识别结果进行融合,
25、其中
26、式中a表示需要融合识别的电梯行为,b和c为不同传感器识别的结果,以监控摄像头和梯级压力传感器为例,b、c则为属于{摔倒,弯腰,下蹲,遮挡}中的一个;m1、m2分别为两个传感器的识别率函数,于传感器本身特性相关。
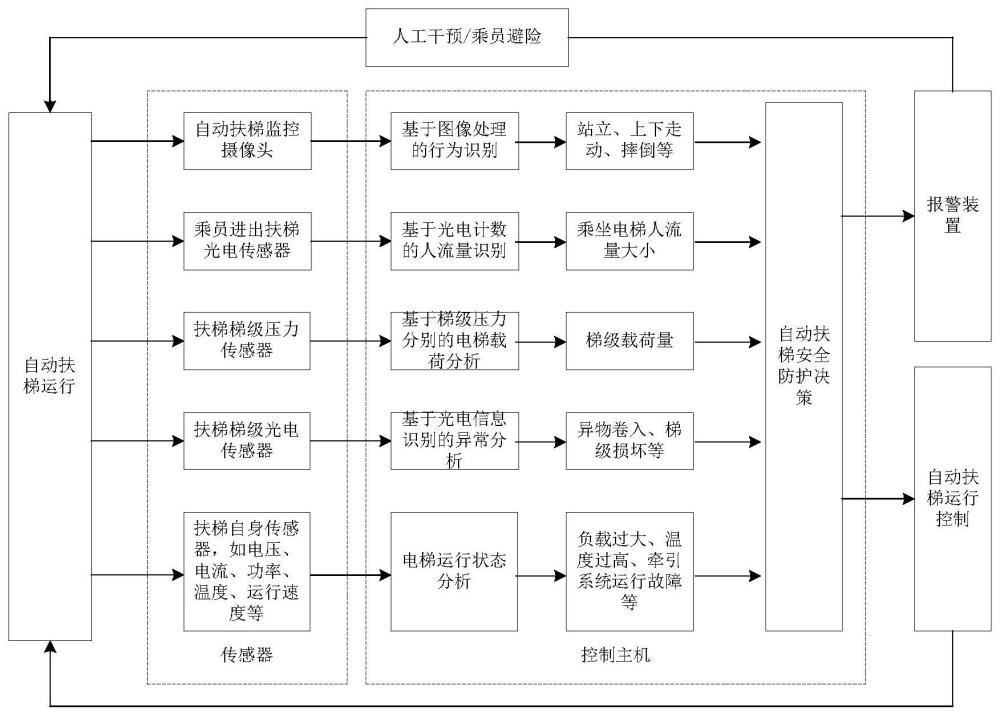
27、本发明另一方面提供了一种自动扶梯实时立体防护系统,系统主要包括信息采集传感器、控制主机、报警装置、执行装置;
28、所述信息采集传感器是针对自动扶梯各个部件的信息采集传感器,和针对自动扶梯负载进行信息采集的传感器;
29、所述控制主机主要用于接收各个传感器采集的信息,并对信息进行处理,判断是否存在自动扶梯运行异常情况,针对特殊情况发出警报,输出控制指令作用于执行装置;
30、所述报警装置包含自动扶梯现场的声光告警装置,以及向自动扶梯维护值班人员发出的告警信息;
31、所述执行装置主要为电梯安全控制装置。
32、优选的,所述信息采集传感器包含多路图像传感器,所述多路图像传感器将信息输入至所述控制主机进行信息处理。
33、优选的,所述信息采集传感器包含光电传感器和梯级压力传感器,所述光电传感器基于乘员进出扶梯统计乘坐扶梯人员数量,所述梯级压力传感器分析每个梯级的承载情况。
34、优选的,所述信息采集传感器包含扶梯梯级光电传感器,用于分析梯级之间的间隙是否正常、梯级是否损坏,判断是否有异物卷入梯级之间;所述扶梯梯级光电传感器分散部署于整个扶梯梯级底部,对自动扶梯进行全时监控。
35、优选的,所述信息采集传感器包含自动扶梯自身传感器,监控自动扶梯的运行功率、温度、牵引电力系统状态,判断自动扶梯运行状态是否正常。
36、与现有技术相比,本发明的有益效果是:
37、本发明通过设置多类型的传感器,对电梯本身的监控和对乘员行为的监控,利用控制主机对传感器信息进行处理,从而对自动扶梯运行的安全状态进行分析,提前进行预警,并快速执行安全操作,提高自动扶梯安全防护的效果。
- 还没有人留言评论。精彩留言会获得点赞!