一种加工运输机器人的制作方法
本发明属于零部件输送,具体为一种加工运输机器人。
背景技术:
1、随着工业化的不断进步,越来越多的工业机器人出现在人们的视野。机器人可依靠自身的动力能源和控制能力实现各种工业加工制造功能。机器人被广泛应用于电子、物流、化工等各个工业领域之中。在对零部件进行输送时,工作人员将紧挨着的零部件分开,同时使得相邻两个零部件的间距处于预设范围内,以使零部件间歇式的输送至加工工位,此简单重复的动作依靠人员持续作业,劳动强度大、效率低,不便于对零部件进行间歇式输送,存在一定的局限性。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种加工运输机器人,有效的解决了简单重复的动作依靠人员持续作业,劳动强度大、效率低,不便于对零部件进行间歇式输送的问题。
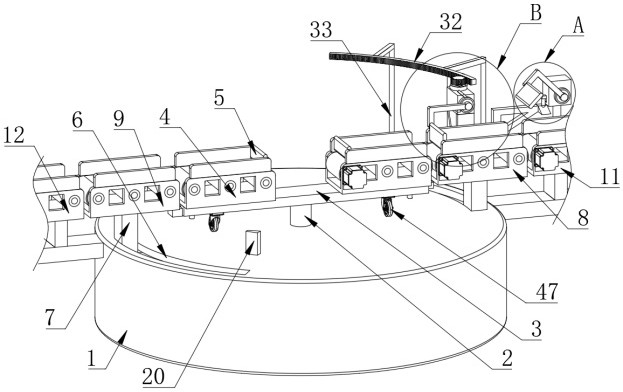
2、为实现上述目的,本发明提供如下技术方案:一种加工运输机器人,包括控制箱,所述控制箱内转动连接有转轴,控制箱固定连接有与转轴相配合的驱动器,转轴的顶端与位于控制箱上方的旋转座固定连接,旋转座的顶部固定连接有两个第一皮带输送机构,两个第一皮带输送机构相靠近的一端分别固定连接有用于限位零部件位置的第一止动板,控制箱的顶部内壁开设有两个弧形孔,控制箱内设有两个支撑架,两个支撑架分别贯穿两个弧形孔,其中一个支撑架的顶端与位于控制箱上方的第二皮带输送机构固定连接,另一个支撑架的顶端与位于控制箱上方的第三皮带输送机构固定连接,控制箱固定连接有与两个支撑架相配合的阻尼式旋转结构,第二皮带输送机构靠近旋转座的一端设有用于限位零部件位置的第二止动板,第二皮带输送机构固定连接有与第二止动板相配合的阻尼翻转单元,控制箱固定安装有上下料组件,上下料组件用于对零部件进行上下料,第二皮带输送机构和第三皮带输送机构相靠近的一端分别固定连接有第一支撑块,旋转座安装有与第一支撑块相配合的间歇拨动同步组件。
3、优选的,所述上下料组件包括固定安装于控制箱一侧用于送料的第四皮带输送机构,控制箱的另一侧固定连接有用于将零部件输送至加工位置的第五皮带输送机构,第四皮带输送机构靠近第二皮带输送机构的一端设有用于限位零部件位置的第三止动板,第四皮带输送机构固定连接有与第三止动板相配合的间歇翻转器。
4、优选的,所述间歇拨动同步组件包括分别设置于旋转座两侧的推板,推板和第一支撑块相配合,旋转座的两侧分别开设有滑槽,两个推板相靠近的一端分别位于两个滑槽内,推板和滑槽的内壁通过第一压缩弹簧连接,滑槽的底部内壁开设有第一矩形孔,推板的底部固定连接有固定柱,且固定柱贯穿第一矩形孔,控制箱的顶部固定连接有两个第一推块,且第一推块设有与固定柱相配合的倾斜面。
5、优选的,所述阻尼翻转单元包括固定安装于第二皮带输送机构上的第一连接架,第一连接架固定连接有第一支撑箱,第一支撑箱设有转动连接的第一传动轴,第一传动轴和第二止动板通过第一固定架连接,第一传动轴与位于第一支撑箱内的第一阻尼盘固定连接,第一支撑箱内设有第二传动轴,第二传动轴的外部套设有转动连接的支撑部,支撑部和第一支撑箱的内壁固定连接,第二传动轴固定连接有与第一阻尼盘相接触的第二阻尼盘,控制箱安装有与第二传动轴相配合的啮合结构,第一支撑箱固定连接有与第一固定架相配合的第一止动条和第二止动条,啮合结构包括固定安装于第二传动轴上的第一伞齿轮,第一支撑箱设有转动连接的连接轴,连接轴固定连接有与第一伞齿轮相啮合的第二伞齿轮,连接轴与位于第一支撑箱上方的第一齿轮固定连接,控制箱的上方设有与第一齿轮相啮合的弧形齿条,弧形齿条和控制箱通过若干第一连接柱连接。
6、优选的,所述间歇翻转器包括固定安装于第四皮带输送机构上的第二连接柱,第二连接柱上固定连接有第二支撑箱,第二支撑箱设有转动连接的第三传动轴,第三传动轴和第三止动板通过第二固定架连接,第三传动轴与位于第二支撑箱内的第二齿轮固定连接,第二支撑箱内设有与第二齿轮相啮合的齿板,第二支撑箱上设有与齿板相配合的复位结构,齿板上固定连接有第二支撑块,第二支撑箱的内壁上开设有第二矩形孔,第二支撑块贯穿第二矩形孔,且第二支撑块与位于第二支撑箱外部的支撑柱固定连接,第二皮带输送机构上固定连接有第二连接架,第二连接架上固定连接有第二推块,第二推块上设有与支撑柱相配合的倾斜面。
7、优选的,所述复位结构包括两个固定安装于齿板上的第三支撑块,第三支撑块上贯穿有导向柱,导向柱的顶端与第二支撑箱的顶部内壁固定连接,导向柱的底端与位于第三支撑块下方的定位块固定连接,导向柱的外部套设有第二压缩弹簧,第二压缩弹簧的两端分别与第三支撑块和第二支撑箱的内壁固定连接。
8、优选的,所述旋转座的底部固定连接有若干第一万向轮,且第一万向轮和控制箱的顶部相接触。
9、优选的,所述支撑架的底部固定连接有支撑腿,支撑腿的底部固定连接有第二万向轮,且第二万向轮和控制箱的底部内壁相接触。
10、优选的,所述驱动器包括固定套设于转轴外部的第三伞齿轮,控制箱内固定连接有电机,电机的输出端固定连接有与第三伞齿轮相啮合的第四伞齿轮。
11、优选的,所述阻尼式旋转结构包括套设于转轴外部的第一固定套,第一固定套和转轴转动连接,且两个支撑架分别与第一固定套固定连接,第一固定套的底部固定连接有第一阻尼环,转轴的外部套设有转动连接的第二固定套,且第二固定套位于第一阻尼环的下方,第二固定套的顶部固定连接有第二阻尼环,第二阻尼环和第一阻尼环相接触,第二固定套的底部固定连接有与第四伞齿轮相啮合的第五伞齿轮,且第四伞齿轮位于第三伞齿轮和第五伞齿轮之间。
12、与现有技术相比,本发明的有益效果是:
13、第四皮带输送机构将最靠近第二皮带输送机构的一个零部件输送至第二皮带输送机构上,同时驱动器驱动转轴和旋转座旋转,间歇拨动同步组件推动第一支撑块和第二皮带输送机构同步移动,且第三止动板阻挡第四皮带输送机构上的零部件朝向第二皮带输送机构移动,第二止动板不再阻挡零部件移动,第二皮带输送机构将零部件输送至同步移动的一个第一皮带输送机构上,当零部件与第一止动板相接触时,间歇拨动同步组件不再推动第一支撑块和第二皮带输送机构同步移动,阻尼式旋转结构通过支撑架驱动第二皮带输送机构反向转动,以使第二皮带输送机构再次复位至初始位置,同时阻尼翻转单元驱动第二止动板相对第二皮带输送机构旋转至初始位置,第二止动板可以再次对位于第二皮带输送机构上零部件的位置进行限位,同时间歇翻转器驱动第三止动板旋转,避免第三止动板限位第四皮带输送机构上零部件的位置;
14、当第一皮带输送机构移动至第三皮带输送机构的一侧时,同理,间歇拨动同步组件驱动第一支撑块和第三皮带输送机构同步移动,第一皮带输送机构将零部件输送至第三皮带输送机构上,零部件输送至第三皮带输送机构上时,间歇拨动同步组件不再驱动第一支撑块和第三皮带输送机构同步移动,阻尼式旋转结构通过支撑架驱动第三皮带输送机构复位至初始位置,第三皮带输送机构将零部件输送至第五皮带输送机构上,第五皮带输送机构将零部件输送至加工工位,第四皮带输送机构上不规整的零部件最终可以在第五皮带输送机构上间歇式输送,便于将零部件间歇式输送至加工工位,不需要人工进行整理,方便零部件的后续加工,提高了便利性。
- 还没有人留言评论。精彩留言会获得点赞!