一种智能检测塑化能力的控制方法和装置与流程
1.本发明涉及注塑机领域,尤其是涉及一种智能检测塑化能力的控制方法和装置。
背景技术:
2.注塑成型是利用塑料的热物理性质,把物料从料斗加入料筒中,料筒外由加热圈加热,使物料软化,在螺杆一端装有在外动力马达作用下驱动旋转的螺杆,物料在螺杆旋转的作用下,沿着螺槽向前输送并逐渐熔融,物料在外加热和螺杆旋转剪切的双重作用下逐渐地熔融塑化,当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下,把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用下后退,使螺杆头部形成储料空间,完成塑化过程,然后,螺杆在注射油缸的活塞推力的作用下,以高速、高压,将储料室内的熔融料通过喷嘴注射到模具的型腔中,型腔中的熔料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制品从模具顶出落下。
3.在中国专利文献上公开的“用于成型机的塑化装置”,其公开号为cn111844664a,公开日期2020
‑
10
‑
30,其具有:塑化缸;塑化螺杆,其设置在塑化缸中、能围绕纵轴线旋转并且能沿纵轴线线性运动,该塑化螺杆具有至少一个功能区域;设置在塑化缸中或上的传感器,利用该传感器能测量距塑化螺杆的至少一个功能区域的表面的距离;以及用于识别功能区域的类型和/或功能区域的运行状态的识别装置,其配置用于通过功能区域相对于距离传感器的运动来检测距离信号变化曲线,将所检测的距离信号变化曲线与所存储的距离信号变化曲线进行比较并且根据所检测的距离信号变化曲线与所存储的距离信号变化曲线的一致性来输出代表功能区域的类型和/或功能区域的运行状态的信号。能够对注塑机的塑化装置进行检测。但是现有技术中很少有对注塑机塑化能力进行检测的技术,并且没有根据检测的塑化能力对注塑机进行进料和塑化的智能控制。
技术实现要素:
4.本发明是为了克服现有技术中很少见到对注塑机塑化能力进行智能检测的问题,提供了一种智能检测塑化能力的控制方法和装置,通过对注塑机实际塑化能力的检测来实现进料量和塑化量的平衡控制,达到对注塑机进行闭环进准控制的目的。
5.为了实现上述目的,本发明采用以下技术方案:
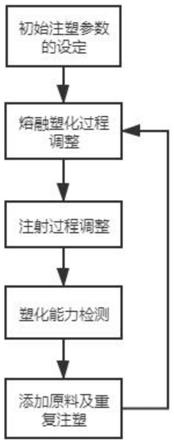
6.一种智能检测塑化能力的控制方法,包括:
7.s1、初始注塑参数的设定,调取数据库中生产目标注塑产品需要的标准相关参数并进行设定;
8.s2、熔融塑化过程调整,在原料的熔融和塑化过程中实时检测实际的塑化参数数值,对照标准相关参数进行调整直到完成熔融塑化过程;
9.s3、注射过程调整,在注射过程中实时检测实际的注射参数数值,对照标准相关参数进行调整直到注射完成;
10.s4、塑化能力检测,测量计算塑化完成的熔融物的实际塑化量;
11.s5、添加原料及重复注塑,根据熔融物的实际塑化量添加对应量的原料进行熔融塑化,重复进行产品注塑。
12.本发明中初始注塑参数的确定是根据历史注塑的经验和相关专家的经验公式得出的,根据过往历史中注塑生产同一种产品过程中注塑机内的背压、注射压力、螺杆后退距离、注射行程、加热温度、螺杆转速等因数的具体参数,通过专业技术人员根据实际情况进行优化后得到的标准相关参数,该标准相关参数能根据实际生产的注塑件的产品质量和设计质量的差异不断调整最后得到符合实际生产需要的标准相关参数数值。在熔融塑化的过程中,需要用塑化装置内布置的各个传感器或检测装置对塑化过程中各项参数进行收集检测,对比标准相关参数,根据差异进一步调整使塑化参数数值接近标准相关参数。在注射过程中的调整过程和熔融塑化的过程相同。塑化能力的检测是对塑化装置中熔融物的实际塑化量的检测,计算一次熔融塑化的过程中有多少原料进行塑化和注射入模具中,决定了实际注塑产品的重量。而根据一次塑化过程中消耗的原料重量从加料口添加相同重量的原料,重复进行熔融塑化过程,保证注塑入模具的熔融物的量与加入料筒的原料的量的平衡。
13.作为优选,所述s2中的塑化参数包括:
14.螺杆后退距离,所述螺杆后退距离决定了料筒中容纳熔融物的量;
15.加热温度和螺杆转速,所述加热温度和螺杆转速决定了从原料到熔融物的转化速度和质量;螺杆背压,所述螺杆背压决定了原料在熔融过程中需要保持的压力大小,决定了熔融物的密度。
16.作为优选,所述s2还包括对熔融物均匀性的检测控制:
17.s21、利用超声波检测装置检测料筒内螺杆头前端已塑化的熔融物的均匀性;
18.s22、熔融物均匀性不满足设定条件,调节螺杆头前端的加热温度和螺杆的转速;
19.s23、超声波检测装置定向振动均匀性不佳的区域,使熔融物均匀分布。
20.本发明中,原料在塑化装置中转化成熔融物主要分为三个阶段,根据螺杆上螺纹的不同进行划分,包括进料段、压缩段和均化段,在螺杆的转动中,进料段用于推动原料的前进,压缩段用于对原料的压缩,利用螺杆转动时对原料的压力和剪切力以及料筒外侧对原料的加热使原料熔融,均化段则是对熔融后的原料进行均化使得熔融物在料筒前端均匀分布。本发明中利用超声波在介质中传播根据介质的不同最终获得的信号也不同的原理,来检测料筒内已经塑化完成的部分熔融物的均匀性,若均匀性不佳说明在塑化过程中设置的塑化参数需要进行相关调整,使得后续塑化的原料能均匀分布。同时对于已塑化但分布不均匀的部分,可以利用超声波定向对不均匀部分进行振动,提高这部分熔融物的流动性,使其与周围的熔融物充分混合,保证均匀性。
21.作为优选,所述s3中的注射参数包括:
22.螺杆注射行程,所述螺杆注射行程为注射过程中螺杆前进的距离,决定了注射熔融物的量;注射温度,所述注射温度为喷嘴附近的温度,测量射出的熔融物温度;
23.熔融物流速,所述熔融物流速为熔融物从喷嘴处射出的速度;
24.注射压力,所述注射压力为注射过程中螺杆对熔融物施加的压力。
25.作为优选,所述s4中塑化能力检测包括:
26.s41、检测塑化完成部分熔融物的实际密度ρ;
27.s42、获取原料的熔融塑化过程中,螺杆的实际后退距离l0和注射过程中螺杆的注
射行程l1,以两者的平均值作为计算实际塑化量的参数;
28.s43、根据注塑机的螺杆直径d计算塑化熔融物的质量
29.本发明中对塑化能力的检测是测量在料筒中螺杆头前端已完成塑化部分的熔融物的重量,根据密度和体积的乘积来准确计算,其体积可以等效为一个圆柱体,圆柱体的底面圆的直径是螺杆直径,圆柱体的高的是完成塑化后螺杆与料筒最前端之间的距离。这个距离可以用螺杆的实际后退距离和螺杆的注射行程的平均值代替,因为螺杆是通过旋转进行前进和后退的,在往复的前进和后退过程中旋转方向会正反交替,作为机械部件由于正反交替旋转容易产生在径向位移上的误差,因此通过一次前进距离和一次后退距离的平均来消除误差。
30.作为优选,所述s5中原料的添加量m1=α
·
m0,所述α为原料与熔融物的转化参数。
31.一种智能检测塑化能力的装置,包括塑化装置,所述塑化装置包括螺杆,所述螺杆设置在料筒内,所述螺杆能绕杆的纵轴线旋转并沿纵轴线运动;所述螺杆与螺杆头连接;所述螺杆头上设置有止逆环;所述料筒与前体固定连接;所述前体与喷嘴固定连接,所述喷嘴外侧套有加热圈;所述塑化装置上设置有若干个传感器,所述智能检测塑化能力的装置中设置有处理器,所述处理器用于接收来自传感器的信息并控制塑化装置的工作。
32.作为优选,所述料筒外侧设置有若干感应加热模块;所述料筒与所述前体连接处设置有超声波检测装置;所述螺杆与所述螺杆头连接处设置有位移传感器;所述前体中设置有密度检测器,用于采集熔融物样本检测密度;所述加热圈用于喷嘴处加热及温度检测;所述螺杆头前端设置有压力传感器。
33.作为优选,还包括上料装置,所述上料装置与所述塑化装置的加料口相连,所述上料装置底部设置有预热测量装置,所述预热测量装置用于对原料的干燥预热和原料重量的测量控制。
34.本发明中设置有处理器,通过处理器接收的各项参数的数据对比标准相关参数,根据实际参数的差异,处理器发出调整信号调整塑化装置的工作状态,使得再次检测的实际参数逐渐接近标准相关参数,经过不断循环调整后使实际工作参数与标准相关参数一致,维持塑化装置的工作稳定,从而保证了注塑产品质量的稳定。
35.本发明具有如下有益效果:通过对注塑机实际塑化能力的检测来实现进料量和塑化量的平衡控制,达到对注塑机进行闭环进准控制的目的;在实际注塑过程中,使用传感器实时检测各项参数,对比标准相关参数进行调整和靠近,保证每一次熔融塑化过程的稳定和一致,使得注塑产品质量稳定一致;在上料装置和加料口之间设置有预热测量装置,可以检测加入原料的质量,同时通过预热排除水分对原料质量的影响。
附图说明
36.图1是本发明控制方法的流程图;
37.图2是本发明塑化装置的结构图;
38.图3是本发明螺杆与前体之间的结构图;
39.图中:1、喷嘴;11、喷嘴加热圈;12、一号温度传感器;2、喷嘴接体;21、接体加热圈;22、二号温度传感器;3、前体;31、密度检测器;4、螺杆头;41、止逆环;42、螺杆头压力传感
器;43、压力传感器;5、螺杆;51、塑化温度传感器;52、位移传感器;53、密度监测装置;6、料筒;61、加料口;62、料筒水套;63、超声波检测装置;64、感应加热模块。
具体实施方式
40.下面结合附图和具体实施方式对本发明做进一步的描述。
41.如图1所示,一种智能检测塑化能力的控制方法,包括:
42.s1、初始注塑参数的设定,调取数据库中生产目标注塑产品需要的标准相关参数并进行设定;
43.s2、熔融塑化过程调整,在原料的熔融和塑化过程中实时检测实际的塑化参数数值,对照标准相关参数进行调整直到完成熔融塑化过程;
44.s3、注射过程调整,在注射过程中实时检测实际的注射参数数值,对照标准相关参数进行调整直到注射完成;
45.s4、塑化能力检测,测量计算塑化完成的熔融物的实际塑化量;
46.s5、添加原料及重复注塑,根据熔融物的实际塑化量添加对应量的原料进行熔融塑化,重复进行产品注塑。
47.在s2中的塑化参数包括:螺杆后退距离,螺杆后退距离决定了料筒中容纳熔融物的量;加热温度和螺杆转速,加热温度和螺杆转速决定了从原料到熔融物的转化速度和质量;螺杆背压,螺杆背压决定了原料在熔融过程中需要保持的压力大小,决定了熔融物的密度。
48.在s2还包括对熔融物均匀性的检测控制:
49.s21、利用超声波检测装置检测料筒内螺杆头前端已塑化的熔融物的均匀性;
50.s22、熔融物均匀性不满足设定条件,调节螺杆头前端的加热温度和螺杆的转速;
51.s23、超声波检测装置定向振动均匀性不佳的区域,使熔融物均匀分布。
52.在s3中的注射参数包括:螺杆注射行程,螺杆注射行程为注射过程中螺杆前进的距离,决定了注射熔融物的量;注射温度,注射温度为喷嘴附近的温度,测量射出的熔融物温度;熔融物流速,熔融物流速为熔融物从喷嘴处射出的速度;注射压力,注射压力为注射过程中螺杆对熔融物施加的压力。
53.在s4中塑化能力检测包括:
54.s41、检测塑化完成部分熔融物的实际密度ρ;
55.s42、获取原料的熔融塑化过程中,螺杆的实际后退距离l0和注射过程中螺杆的注射行程l1,以两者的平均值作为计算实际塑化量的参数;
56.s43、根据注塑机的螺杆直径d计算塑化熔融物的质量
57.在s5中原料的添加量m1=α
·
m0,α为原料与熔融物的转化参数。即每α单位质量的原料在经过熔融塑化后可以转化为一单位质量的熔融物。
58.一种智能检测塑化能力的装置,包括塑化装置,塑化装置包括螺杆,螺杆设置在料筒内,螺杆能绕杆的纵轴线旋转并沿纵轴线运动;螺杆与螺杆头连接;螺杆头上设置有止逆环;料筒与前体固定连接;前体与喷嘴固定连接,喷嘴外侧套有加热圈;塑化装置上设置有若干个传感器,智能检测塑化能力的装置中还设置有处理器,处理器用于接收来自传感器
的信息并控制塑化装置的工作。
59.料筒外侧设置有若干感应加热模块;料筒与前体连接处设置有超声波检测装置;螺杆与螺杆头连接处设置有位移传感器;前体中设置有密度检测器,用于采集熔融物样本检测密度;加热圈用于喷嘴处加热及温度检测;螺杆头前端设置有压力传感器。
60.包括有上料装置,上料装置与塑化装置的加料口相连,上料装置底部设置有预热测量装置,预热测量装置用于对原料的干燥预热和原料重量的测量控制。
61.本发明中初始注塑参数的确定是根据历史注塑的经验和相关专家的经验公式得出的,根据过往历史中注塑生产同一种产品过程中注塑机内的背压、注射压力、螺杆后退距离、注射行程、加热温度、螺杆转速等因数的具体参数,通过专业技术人员根据实际情况进行优化后得到的标准相关参数,该标准相关参数能根据实际生产的注塑件的产品质量和设计质量的差异不断调整最后得到符合实际生产需要的标准相关参数数值。在熔融塑化的过程中,需要用塑化装置内布置的各个传感器或检测装置对塑化过程中各项参数进行收集检测,对比标准相关参数,根据差异进一步调整使塑化参数数值接近标准相关参数。在注射过程中的调整过程和熔融塑化的过程相同。塑化能力的检测是对塑化装置中熔融物的实际塑化量的检测,计算一次熔融塑化的过程中有多少原料进行塑化和注射入模具中,决定了实际注塑产品的重量。而根据一次塑化过程中消耗的原料重量从加料口添加相同重量的原料,重复进行熔融塑化过程,保证注塑入模具的熔融物的量与加入料筒的原料的量的平衡。
62.本发明中,原料在塑化装置中转化成熔融物主要分为三个阶段,根据螺杆上螺纹的不同进行划分,包括进料段、压缩段和均化段,在螺杆的转动中,进料段用于推动原料的前进,压缩段用于对原料的压缩,利用螺杆转动时对原料的压力和剪切力以及料筒外侧对原料的加热使原料熔融,均化段则是对熔融后的原料进行均化使得熔融物在料筒前端均匀分布。本发明中利用超声波在介质中传播根据介质的不同最终获得的信号也不同的原理,来检测料筒内已经塑化完成的部分熔融物的均匀性,若均匀性不佳说明在塑化过程中设置的塑化参数需要进行相关调整,使得后续塑化的原料能均匀分布。同时对于已塑化但分布不均匀的部分,可以利用超声波定向对不均匀部分进行振动,提高这部分熔融物的流动性,使其与周围的熔融物充分混合,保证均匀性。
63.本发明中对塑化能力的检测是测量在料筒中螺杆头前端已完成塑化部分的熔融物的重量,根据密度和体积的乘积来准确计算,其体积可以等效为一个圆柱体,圆柱体的底面圆的直径是螺杆直径,圆柱体的高的是完成塑化后螺杆与料筒最前端之间的距离。这个距离可以用螺杆的实际后退距离和螺杆的注射行程的平均值代替,因为螺杆是通过旋转进行前进和后退的,在往复的前进和后退过程中旋转方向会正反交替,作为机械部件由于正反交替旋转容易产生在径向位移上的误差,因此通过一次前进距离和一次后退距离的平均来消除误差。
64.本发明中设置有处理器,通过处理器接收的各项参数的数据对比标准相关参数,根据实际参数的差异,处理器发出调整信号调整塑化装置的工作状态,使得再次检测的实际参数逐渐接近标准相关参数,经过不断循环调整后使实际工作参数与标准相关参数一致,维持塑化装置的工作稳定,从而保证了注塑产品质量的稳定。
65.在本发明的实施例中如图2所示,塑化装置包括有料筒6,料筒6前端与前体3连接,料筒内设置有螺杆5,螺杆前端与螺杆头4连接,螺杆头上套有止逆环41,前体通过喷嘴接体
2与喷嘴1连接,喷嘴1上套有喷嘴加热圈11,喷嘴接体2上套有接体加热圈21,料筒6上与螺杆的螺纹尾端相应位置设置有加料口61,在加料口前方与螺杆进料段c中点位置相对应的料筒外侧设置有料筒水套62,整个螺杆分为进料段c、压缩段b和均化段a。
66.如图2所示,在喷嘴加热圈11上设置有一号温度传感器12,用于测量从喷嘴处射出的熔融物的温度。在接体加热圈21上设置有二号温度传感器22,用于测量从前体流出的熔融物的温度,首先从二号温度传感器22测量熔融物温度,当温度达不到设定的温度时,可以通过接体加热圈加热,在一号温度传感器12处再次检测加热后的温度,同时喷嘴加热圈也可以继续加热,通过二级温度检测和加热可以保证射出熔融物的温度条件符合设定的要求。此外,设置喷嘴加热圈和接体加热圈,可以保证注塑模具在冷却的过程中,喷嘴处的熔融物不会受到冷却温度的影响而堵塞喷嘴。
67.在螺杆内还等间隔设置有若干个塑化温度传感器51,每个塑化温度传感器51用于实时检测其附近区域的熔融物的温度,在料筒外侧也等间隔设置若干个感应加热模块64,每个塑化温度传感器对应有相对设置的两个感应加热模块。当某一个塑化温度传感器检测到熔融物的温度低于设定的温度参数时,这个塑化温度传感器对应的感应加热模块加大加热功率,提升附近区域熔融物的温度,以维持料筒内温度的稳定。感应加热模块能够对待加热区域进行精准加热,同时相较于电阻加热更加节能。料筒上设置的料筒水套62用于水套对应位置到加料口处原料的冷却,防止料筒中的高温热能传递到刚进入加料口的原料,使得原料融化影响加料口的进料。
68.在料筒和前体的连接处附近还相对设置有两个超声波检测装置63,当塑化装置内进行塑化时,螺杆逐渐后退,塑化完成的熔融物储存在前体和料筒内螺杆头前端,超声波检测装置对这部分完成塑化的熔融物进行检测。其中一个超声波检测装置甲向熔融物发出固定的超声波信号,另一个超声波检测装置乙接收从熔融物中传播过来的信号,当熔融物均匀分布时,各处密度基本一致,此时超声波信号在熔融物各处传播速度一致,因此超声波检测装置乙接收的信号教统一,信号的波动在设定的波动阈值范围之内。因此当检测到接收信号波动范围小于设定的波动阈值时可以认定熔融物均匀。而当熔融物分布不均匀时,各处密度有差异,此时超声波通过不同路径传播的速度不一致,超神波检测装置乙接收的信号有明显差异,其信号的波动超出设定的波动阈值范围。此时两个超神波检测装置都能定向对检测到的分布不均匀区域发出高频超声,使该区域进行高频振动提高其流动性,该区域的熔融物会与周围的熔融物混合从而使得熔融物均匀分布。两个超声波检测装置都能发送和接收信号。
69.如图3所示,前体中设置有密度检测器31,密度检测器一侧通过l型通道与前体内的圆台储料区侧面连接,另一侧通过直线通道连接前体内的圆柱形侧面。密度检测器能够对储存的熔融物进行取样密度检测,首先熔融物从l型通道中进入密度检测器31中,然后封闭整个密度检测器,整个密度检测器是一个单位体积的立方体,通过检测器内设置的力传感器测量单位体积内的熔融物的重力就能推算出熔融物的实际密度,之后打开密度检测器,检测器内部的熔融物从直线通道流出。
70.在螺杆头前端设置有螺杆头压力传感器42,能够实时检测熔融物和螺杆头间的压力,间接推算具体的压强数据,在实际使用中螺杆头压力传感器适合选用大量程的力传感器,首选用于检测注射过程中的注射压力。在止逆环41内壁上也设置有压力传感器43,能够
实时检测从止逆环和螺杆头间隙通过的熔融物的压力,间接推算熔融物的压强,在实际应用中首选用于检测塑化过程中的压力,与设定的螺杆背压进行比较差异,作为具体塑化压力调节的依据。
71.在螺杆头末端与螺杆连接处之间存在锥形空间,在这个空间中设置有位移传感器52,能够测量螺杆在料筒内轴向移动的距离,结合螺杆移动的时间能够通过处理器自动计算出螺杆移动的速度。同时还可以一起设置旋转计数器,用于计算检测螺杆转动的圈数和转速。作为更进一步的设计,在螺杆上的第一圈螺纹之间设置有密度监测装置53,该密度监测装置通过一直线通道与螺杆和料筒的间隙联通,在转动过程中,熔融物从直线通道进入密度监测装置,然后封闭密度监测装置,密度监测装置是一个单位体积的立方体,设置在其上的力传感器测量内部单位体积的熔融物重量从而推断出实际熔融物的密度,之后打开密度监测装置使熔融物流出。
72.本实施例的具体注塑过程如下:首先在注塑前,将预设的标准相关参数输入注塑机的处理器中,作为注塑机实际运行参数的标准。在原料从加料口进入料筒后,进入塑化过程,螺杆通过旋转将原料在进料段不断向前推进,在压缩段将原料压缩通过感应加热和螺杆的剪切力使原料熔融,在均化段使融融的原料均匀分布储存到料筒内螺杆头前端的储料部分。在这个过程中,螺杆内分布的塑化温度传感器51实时感知螺杆与料筒间隙的熔融物或原料的温度并传送到处理器,当处理器接收的温度小于加热温度时,与塑化温度传感器相邻的两个相对的感应加热模块64会受到处理器发出的提高加热功率的信号,使对应区域的实际温度上升;当处理器接收的温度大于加热温度时,与塑化温度传感器相邻的两个相对的感应加热模块64会受到处理器发出的降低加热功率的信号,使对应区域的实际温度下降。同时压力传感器43实时检测熔融物通过止逆环时的压力,将压力检测结果发送到处理器中,当处理器接受到的压力小于螺杆背压时,维持不变,使螺杆持续转动将熔融物挤压推入料筒内螺杆头前端,使得其压力逐渐上升;当处理器接收到的压力大于螺杆背压时,止逆环会截止螺杆头两侧的熔融物流动,此时处理器发出降低压力的信号,螺杆提高后退的速度降低熔融物压力。位移传感器52实时检测螺杆的轴向水平位置,处理器根据螺杆开始后退时的位置与后退结束的位置的差值计算螺杆实际后退距离l0,同时计量后退过程的时间t1,得到螺杆的平均后退速度v1=l0/t1。此外螺杆上设置的旋转计数器可以计量螺杆旋转的圈数,结合所用的时间可以得到螺杆的实际转速,根据实际转速与标准相关参数中的转速对比调节螺杆的实际转速。在塑化过程中,使用超声波检测装置63对料筒内螺杆头前端已完成塑化的熔融物进行均匀性检测,对不均匀的区域发出超声波使其高频振动,与周围区域的熔融物混合,提高分布的均匀性。
73.在塑化完成后,进入注射阶段,在注射阶段塑化温度传感器51和感应加热模块64的使用方式与塑化过程中相同。注射过程中,螺杆不断向前推进,位移传感器52实时检测螺杆的轴向水平位置,处理器根据螺杆开始注射时的位置和注射结束后的位置的差值计算螺杆的实际注射行程l1,同时计量注射过程的时间t2,得到螺杆的平均注射速度v2=l1/t2,同时还可以通过测量某一短时间δt
i
内螺杆前进的距离δl
i
来计算螺杆某一时刻前进速度v
i
=δl
i
/δt
i
,由于螺杆直径的截面面积恒定,喷嘴处截面的面积也是恒定的,螺杆直径截面面积是喷嘴处截面面积的ε倍,可以推算得到喷嘴处的实际熔融物流速为εv
i
。根据实际熔融物流速与标准相关参数设定的熔融物流速对比,采用基于负反馈的pid算法进行控制,使
得实际熔融物流速与标准相关参数设定的熔融物流速一致。
74.在完成注射过程后,检测整个注塑过程的塑化能力,即测量塑化完成的熔融物质量也等同于注射过程中注射出的熔融物质量。在本发明的实施例中存在两种测量塑化能力的方法。第一种方法是对储存在前体圆台区域和料筒内螺杆头前端的均匀塑化的熔融物质量的整体测定。在塑化过程中,螺杆不断将塑化的熔融物推动到螺杆头前端,使得熔融物堆积产生压力将螺杆不断后退,螺杆后退的距离l0就是塑化的熔融物占有的空间的长度,其占有的空间截面就是以螺杆直径大小为直径的圆。同时在注射过程中,螺杆前进推动螺杆头前端这些塑化的熔融物注射入模具,因此塑化的熔融物体积又可以等效于螺杆前进的注射行程l1为长度,螺杆直径大小作为底面直径的圆的圆柱体体积。在两次的体积等效中,圆柱体的地面面积不变,圆柱体的长度分别为l0和l1,由于螺杆作为机械部件在旋转的过程中前进和后退时会产生误差,因此前进的距离和后退的距离求取平均消除机械误差得到精确的实际运动距离因此可以得到塑化的熔融物的体积为同时前体3中的密度检测器31会自动采集储存的均匀熔融物样本计算熔融物密度ρ,从而得到注塑装置的塑化能力即塑化的熔融物质量
75.第二种方法是根据螺杆每旋转一次向前推动到储存熔融物区域的熔融物的量来累加测定塑化能力。如图3所示选取螺杆顶端第一环螺纹和料筒间隙的体积作为没旋转一次螺杆推动的塑化熔融物的体积。第一环螺纹的螺距为s,螺杆直径为d,螺槽深度为h,因此可以得到每次旋转推动的塑化熔融物的体积为然后根据旋转计数器计量出螺杆推动塑化熔融物总共旋转的圈数n,就可以得到塑化熔融物的总体积v=n
·
δv。与此同时在第一环螺杆上设置的密度监测装置53可以对熔融物进行采样然后测量熔融物的密度ρ,最后得到注塑装置的塑化能力即塑化的熔融物质量
76.最后根据之前检测到得到的塑化能力即塑化熔融物的具体质量m0,确定对应需要添加的原料的质量m1=α
·
m0,保证存在于料筒和螺杆之间处于塑化过程中的熔融物和原料量的平衡稳定,避免加入的原料量过多或过少造成注射入模具的熔融物质量不一致。以此重复进行加料和注塑的过程,实现对塑化能力检测和加料量的闭环控制。式中的α为原料与熔融物的转化参数,即每α单位质量的原料在经过熔融塑化后可以转化为一单位质量的熔融物。该参数是根据历史塑化经验以及注塑领域专家操作注塑机的具体经验优化确定的。
77.上述实施例是对本发明的进一步阐述和说明,以便于理解,并不是对本发明的任何限制,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1