基于离散元法的SMC模塑料生产用高速搅拌机的制作方法
基于离散元法的smc模塑料生产用高速搅拌机
技术领域
1.本发明涉及smc模塑料技术领域,具体为基于离散元法的smc模塑料生产用高速搅拌机。
背景技术:
2.smc模塑料主要原料由smc专用纱、不饱和树脂、低收缩添加剂,填料及各种助剂组成,smc具有优越的电气性能,耐腐蚀性能,质轻及工程设计容易、灵活等优点,其机械性能可以与部分金属材料相媲美,因而广泛应用于运输车辆、建筑、电子、电气等行业中。
3.smc模塑料在成型之间需要通过搅拌提高其质量,现有的搅拌装置无法根据塑料成分自动选择搅拌模式,容易造成原料的损坏,而且无法自动对原料中的块状塑料进行处理,容易出现搅拌不完全现象,因此,设计可智能搅拌原料和搅拌效果好的基于离散元法的smc模塑料生产用高速搅拌机是很有必要的。
技术实现要素:
4.本发明的目的在于提供基于离散元法的smc模塑料生产用高速搅拌机,以解决上述背景技术中提出的问题。
5.为了解决上述技术问题,本发明提供如下技术方案:基于离散元法的smc模塑料生产用高速搅拌机,包括搅拌机和智能搅拌系统,其特征在于:所述搅拌机包括底座,所述底座上方固定安装有电机,所述电机右侧设置有控制器,所述控制器底部与底座上表面固定连接,所述底座右侧固定安装搅拌机构,所述电机与智能搅拌系统电连接,所述智能搅拌系统与控制器电连接,所述电机右侧固定连接有对接销。
6.根据上述技术方案,所述搅拌机构包括进料筒,所述进料筒与底座固定连接,所述进料筒右侧内壁轴承连接有搅拌柱,所述搅拌柱表面均匀固定安装有若干搅拌叶,所述搅拌柱左端固定安装有对接腔,所述进料筒右侧内壁固定安装有震动器,所述进料筒上下内壁均匀固定安装有若干加热环,所述进料筒下方设置有发动机,所述发动机分别与加热环、震动器电连接,所述发动机、进料筒内壁均与智能搅拌系统电连接。
7.根据上述技术方案,所述智能搅拌系统包括智能扫描模块、处理模块、数据传输模块、数据接收模块、计算模块和智能控制模块,所述扫描模块分别与处理模块、进料筒内壁、数据传输模块电连接,所述数据接收模块分别与计算模块、数据传输模块电连接,所述计算模块与智能控制模块电连接,所述智能控制模块分别与发动机、电机电连接;
8.所述扫描模块用于通过进料筒内壁对液态塑料的成分进行扫描,所述处理模块用于根据扫描得出的塑料成分对发动机、控制器进行控制,所述数据传输模块用于将扫描到的塑料成分数据传输出去,所述数据接收模块用于对传输出来的塑料数据进行接收,所述计算模块用于通过接收到的数据进行计算得出结果,所述智能控制模块用于根据计算得出的结果分别与电机、发动机进行控制。
9.根据上述技术方案,所述处理模块包括成分收集模块、判断模块、保护模块和驱动
模块,所述成分收集模块与扫描模块电连接,所述判断模块与成分收集模块电连接,所述判断模块与保护模块电连接,所述成分收集模块与驱动模块电连接,所述驱动模块与发动机电连接,所述保护模块与控制器电连接;
10.所述成分收集模块用于根据扫描模块扫描出的液态smc模塑料成分对该塑料成分进行成分数据的收集,所述判断模块用于根据收集到的塑料成分进行判断得出结果,所述保护模块用于根据判断得出的结果对控制器进行控制,所述驱动模块用于根据收集到的塑料成分数据控制发动机运行。
11.根据上述技术方案,所述智能搅拌系统包括以下运行步骤:
12.s1、将需要搅拌的液态smc塑料投入进料筒内,开启控制器,通过电驱动使智能搅拌系统运行,开始对塑料进行搅拌;
13.s2、扫描模块根据进料筒内壁对塑料的成分进行扫描,得出塑料的成分复杂程度,再进扫描后的塑料成分数据传输到数据传输模块中;
14.s3、数据传输模块再将成分数据传输出去,传输出去的塑料成分数据被数据接收模块所接收;
15.s4、接收到的数据通过电传输从数据接收模块传递到计算模块中,计算模块对得到的塑料成分数据进行计算得出结果;并将结果输入进控制模块中;
16.s5、控制模块通过电驱动控制电机进行转动并控制电机的转动速度,电机转动后带动搅拌机构运作,搅拌柱对塑料进行搅拌,从而改变对塑料的搅拌速度;
17.s6、同时控制模块通过电驱动控制发动机运行,发动机通过电驱动控制震动器对液态塑料进行震动,将液态塑料内的块状塑料震散,并通过计算得到的数据使发动机改变对震动器的输出大小,从而改变对塑料的震动程度;
18.s7、扫描模块扫描到的塑料成分数据传输到成分收集模块中,成分收集模块对数据进行收集,并将数据输入进驱动模块内;
19.s8、驱动模块控制发电机对加热环的输出功率,从而使塑料持续被高温加热;
20.s9、加热环输出功率高到一定程度后,通过电驱动控制震动器的震动频率瞬间增高;
21.s10、同时成分收集模块将塑料成分数据传输到判断模块中,判断模块经过判断后得出结果,并将结果输入到保护模块内,保护模块通过电驱动使控制器停止运行;
22.s11、塑料搅拌完毕后将液态smc模塑料送入下一道工序中,这时关闭控制器,系统停止运行,如需继续对下一批液态smc模塑料进行搅拌,则重复步骤s1至步骤s10。
23.根据上述技术方案,所述步骤s1至步骤s5中,其中,s
转
为电机的输出转速,s
电
为电机最高转速值是常数,l
耗
为电机转动过程中带动搅拌柱转动所消耗的能耗值是常数,q
塑
为塑料成分种类的数量多少,s
系
为电机转动速度的系数是常数,cosα为电机的转动角度是常数,当液态smc模塑料的成分种类数量越多表示成分越为复杂时,则电机的转速越慢,搅拌柱的转速则越慢,对塑料的搅拌强度越低。
24.根据上述技术方案,所述步骤s6中,为防止搅拌过程中液态smc模塑料中的块状塑料无法被搅拌散开,通过以下计算公式解决:
[0025][0026]
当h
耗
《k
限
,h
耗
保持不变;
[0027]
当h
耗
》k
限
,h
耗
值骤降为零后再恢复到初始值大小,从而使震动器进行一次较强频率的震动;
[0028]
式中,h
震
为震动器的震动强度,h
极
为震动器极限震动强度是常数,h
系
为震动器震动系数是常数,h
耗
为震动器震动过程中的能耗值,k
限
为震动器设定的震动值是常数,当搅拌速度越慢时,对塑料的搅拌能力较低,从而使震动器的震动强度越高。
[0029]
根据上述技术方案,所述步骤s7和步骤s8中,通过驱动模块控制加热环运行,加热环运行产生大量高温对液态塑料进行加热,塑料在搅拌过程中,搅拌柱搅拌速度较慢时,防止液态塑料一直处于相对静态的状态而冷却凝固,通过加热液态塑料使其不容易凝固。
[0030]
根据上述技术方案,所述步骤s9中,通过驱动模块控制加热环,当加热环温度高达一定程度后,通过电驱动控制震动器的震动强度达到震动器本身的承受强度极限,从而使液态塑料在进料筒内翻滚,使其被均匀加热。
[0031]
根据上述技术方案,所述步骤s10中,通过判断模块得出塑料的成分不合格,则根据保护模块驱动控制器停止,控制器停止则使智能搅拌系统停止运行,带动该装置停止运行,防止在塑料不合格的情况下继续搅拌浪费能源消耗,起到节能的作用。
[0032]
与现有技术相比,本发明所达到的有益效果是:本发明,通过设置控制器,通过电驱动带动智能搅拌系统运行,智能搅拌系统通过电驱动带动电机运行,电机通过对接销与搅拌机构对接,从而驱动搅拌机构对液态smc模塑料进行搅拌,使液态smc模塑料内部充分相溶,提高液态smc模塑料的质量。
附图说明
[0033]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0034]
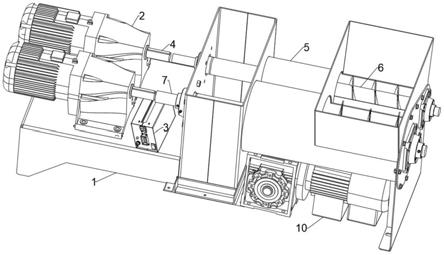
图1是本发明的整体结构示意图;
[0035]
图2是本发明的进料筒内部结构示意图;
[0036]
图3是本发明的智能搅拌系统流程示意图;
[0037]
图中:1、底座;2、电机;3、控制器;4、对接销;5、进料筒;6、搅拌柱;7、对接腔;8、震动器;9、加热环;10、发动机。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
请参阅图1-3,本发明提供技术方案:基于离散元法的smc模塑料生产用高速搅拌机,包括搅拌机和智能搅拌系统,其特征在于:搅拌机包括底座1,底座1上方固定安装有电
机2,电机2右侧设置有控制器3,控制器3底部与底座1上表面固定连接,底座1右侧固定安装搅拌机构,电机2与智能搅拌系统电连接,智能搅拌系统与控制器3电连接,电机2右侧固定连接有对接销4,操作人员将需要搅拌的液态smc模塑料倒入搅拌机构,再开启控制器3,控制器3通过电驱动带动智能搅拌系统运行,智能搅拌系统通过电驱动带动电机2运行,电机2通过对接销4与搅拌机构对接,从而驱动搅拌机构对液态smc模塑料进行搅拌,使液态smc模塑料内部充分相溶,提高液态smc模塑料的质量;
[0040]
搅拌机构包括进料筒5,进料筒5与底座1固定连接,进料筒5右侧内壁轴承连接有搅拌柱6,搅拌柱6表面均匀固定安装有若干搅拌叶,搅拌柱6左端固定安装有对接腔7,进料筒5右侧内壁固定安装有震动器8,进料筒5上下内壁均匀固定安装有若干加热环9,进料筒5下方设置有发动机10,发动机10分别与加热环9、震动器8电连接,发动机10、进料筒5内壁均与智能搅拌系统电连接,通过上述步骤,电机2开启后,对接销4向右伸出与对接腔7对接,带动搅拌柱6转动,搅拌柱6转动带动搅拌叶对液态smc模塑料进行搅拌,控制器3开启后,通过电驱动带动智能搅拌系统运行,智能搅拌系统通过电驱动使进料筒5内壁对塑料的成分进行扫描,同时通过电驱动带动发动机10运行,发动机10电驱动控制加热环9对液态的smc模塑料进行加热,防止其冷却定型,同时通过电驱动控制震动器8运行,震动器8发出高频率震动并对液态的smc模塑料进行震动,进而打碎内部块状的smc模塑料;
[0041]
智能搅拌系统包括智能扫描模块、处理模块、数据传输模块、数据接收模块、计算模块和智能控制模块,扫描模块分别与处理模块、进料筒5内壁、数据传输模块电连接,数据接收模块分别与计算模块、数据传输模块电连接,计算模块与智能控制模块电连接,智能控制模块分别与发动机10、电机2电连接;
[0042]
扫描模块用于通过进料筒5内壁对液态塑料的成分进行扫描,处理模块用于根据扫描得出的塑料成分对发动机10、控制器3进行控制,数据传输模块用于将扫描到的塑料成分数据传输出去,数据接收模块用于对传输出来的塑料数据进行接收,计算模块用于通过接收到的数据进行计算得出结果,智能控制模块用于根据计算得出的结果分别与电机2、发动机10进行控制;
[0043]
处理模块包括成分收集模块、判断模块、保护模块和驱动模块,成分收集模块与扫描模块电连接,判断模块与成分收集模块电连接,判断模块与保护模块电连接,成分收集模块与驱动模块电连接,驱动模块与发动机10电连接,保护模块与控制器3电连接;
[0044]
成分收集模块用于根据扫描模块扫描出的液态smc模塑料成分对该塑料成分进行成分数据的收集,判断模块用于根据收集到的塑料成分进行判断得出结果,保护模块用于根据判断得出的结果对控制器3进行控制,驱动模块用于根据收集到的塑料成分数据控制发动机10运行;
[0045]
智能搅拌系统包括以下运行步骤:
[0046]
s1、将需要搅拌的液态smc塑料投入进料筒5内,开启控制器3,通过电驱动使智能搅拌系统运行,开始对塑料进行搅拌;
[0047]
s2、扫描模块根据进料筒5内壁对塑料的成分进行扫描,得出塑料的成分复杂程度,再进扫描后的塑料成分数据传输到数据传输模块中;
[0048]
s3、数据传输模块再将成分数据传输出去,传输出去的塑料成分数据被数据接收模块所接收;
[0049]
s4、接收到的数据通过电传输从数据接收模块传递到计算模块中,计算模块对得到的塑料成分数据进行计算得出结果;并将结果输入进控制模块中;
[0050]
s5、控制模块通过电驱动控制电机2进行转动并控制电机2的转动速度,电机2转动后带动搅拌机构运作,搅拌柱6对塑料进行搅拌,从而改变对塑料的搅拌速度;
[0051]
s6、同时控制模块通过电驱动控制发动机10运行,发动机10通过电驱动控制震动器8对液态塑料进行震动,将液态塑料内的块状塑料震散,并通过计算得到的数据使发动机10改变对震动器8的输出大小,从而改变对塑料的震动程度;
[0052]
s7、扫描模块扫描到的塑料成分数据传输到成分收集模块中,成分收集模块对数据进行收集,并将数据输入进驱动模块内;
[0053]
s8、驱动模块控制发电机10对加热环9的输出功率,从而使塑料持续被高温加热;
[0054]
s9、加热环9输出功率高到一定程度后,通过电驱动控制震动器8的震动频率瞬间增高;
[0055]
s10、同时成分收集模块将塑料成分数据传输到判断模块中,判断模块经过判断后得出结果,并将结果输入到保护模块内,保护模块通过电驱动使控制器3停止运行;
[0056]
s11、塑料搅拌完毕后将液态smc模塑料送入下一道工序中,这时关闭控制器3,系统停止运行,如需继续对下一批液态smc模塑料进行搅拌,则重复步骤s1至步骤s10;
[0057]
步骤s1至步骤s5中,其中,s
转
为电机2的输出转速,s
电
为电机2最高转速值是常数,l
耗
为电机2转动过程中带动搅拌柱6转动所消耗的能耗值是常数,q
塑
为塑料成分种类的数量多少,s
系
为电机2转动速度的系数是常数,cosα为电机2的转动角度是常数,当液态smc模塑料的成分种类数量越多表示成分越为复杂时,则电机2的转速越慢,搅拌柱6的转速则越慢,对塑料的搅拌强度越低,可以针对成分约为复杂的塑料其质量要求越高,降低对其的搅拌强度,使塑料的质量得到保障,同时针对成分较为简单的塑料,加大搅拌强度,使塑料可以被快速搅拌充分,加快加工时间;
[0058]
步骤s6中,为防止搅拌过程中液态smc模塑料中的块状塑料无法被搅拌散开,通过以下计算公式解决:
[0059][0060]
当h
耗
《k
限
,h
耗
保持不变;
[0061]
当h
耗
》k
限
,h
耗
值骤降为零后再恢复到初始值大小,从而使震动器8进行一次较强频率的震动;
[0062]
式中,h
震
为震动器8的震动强度,h
极
为震动器8极限震动强度是常数,h
系
为震动器8震动系数是常数,h
耗
为震动器8震动过程中的能耗值,k
限
为震动器8设定的震动值是常数,当搅拌速度越慢时,对塑料的搅拌能力较低,从而使震动器8的震动强度越高,可以针对搅拌越慢加大震动器8震动强度,防止塑料内部块状塑料无法被彻底搅碎的现象发生,并针对搅拌较快时降低震动器8震动强度,减少震动器8的能源消耗,同时当震动器8的能耗加大时表示塑料密度较大,从而瞬间加大震动器8强度可以加强震动时的穿透性,使块状塑料被充分震碎;
[0063]
步骤s7和步骤s8中,通过驱动模块控制加热环9运行,加热环9运行产生大量高温对液态塑料进行加热,塑料在搅拌过程中,搅拌柱6搅拌速度较慢时,防止液态塑料一直处于相对静态的状态而冷却凝固,通过加热液态塑料使其不容易凝固;
[0064]
步骤s9中,通过驱动模块控制加热环9,当加热环9温度高达一定程度后,通过电驱动控制震动器8的震动强度达到震动器8本身的承受强度极限,从而使液态塑料在进料筒5内翻滚,使其被均匀加热;
[0065]
步骤s10中,通过判断模块得出塑料的成分不合格,则根据保护模块驱动控制器3停止,控制器3停止则使智能搅拌系统停止运行,带动该装置停止运行,防止在塑料不合格的情况下继续搅拌浪费能源消耗,起到节能的作用。
[0066]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0067]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1