一种基于机器人的柔性橡胶制品自动脱模系统的制作方法
1.本实用新型涉及橡胶制品脱模技术领域,尤其涉及一种基于机器人的柔性橡胶制品自动脱模系统。
背景技术:
2.当前,橡胶制品已经被广泛的应用于生产、生活中,生产过程中,原料在橡胶硫化机内经硫化、成型最终制成橡胶制品,以滚筒洗衣机的橡胶门封为例,现有技术中,橡胶门封硫化成型后会套于硫化机内的模具上,脱模常采用手工脱模,往往存在劳动强度大,且生产效率低等问题。
技术实现要素:
3.为了解决上述问题,本实用新型提供了一种基于机器人的柔性橡胶制品自动脱模系统,能够自动将硫化成型后的橡胶制品脱模取出,而具有较好的使用效果。
4.本实用新型采用的技术方案是:一种基于机器人的柔性橡胶制品自动脱模系统,包括工业机器人,以及对柔性橡胶制品压模成型的注塑成型机,所述注塑成型机包括注射装置、塑化装置及具有模芯的合模装置,基于机器人的柔性橡胶制品自动脱模系统还包括安装于所述工业机器人上的脱模用夹具,以及控制所述工业机器人、所述注塑成型机以及所述脱模用夹具三者联动以实现自动脱模的控制模块,所述注塑成型机还包括安装于所述合模装置下部的移模装置,以及将所述合模装置的模芯顶出的顶出装置,所述脱模用夹具包括与所述工业机器人连接的第一连接组件,以及安装于所述第一连接组件上的、将所述柔性橡胶制品的注胶口料把夹取的第一夹取组件;还包括连接于所述第一连接组件上的第二连接组件,以及安装于所述第二连接组件上的、将所述柔性橡胶制品压模后的成品咬合夹取的第二夹取组件。
5.作为对上述技术方案的进一步限定,所述合模装置包括上模,以及与所述上模连接的中模;还包括下模,以及活动安装于所述下模内的模芯,所述移模装置包括移动板,以及安装于所述注塑成型机上以推动所述移动板横向移动的移模液压缸,所述下模安装于所述移动板上,所述顶出装置包括安装于所述注塑成型机上的顶升液压缸,所述顶升液压缸将所述模芯于所述下模内顶出。
6.作为对上述技术方案的进一步限定,所述控制模块包括plc控制器。
7.作为对上述技术方案的进一步限定,所述第一夹取组件包括对所述注胶口料把进行夹取的手指气缸,所述手指气缸包括端部形成有u字形开口的气缸体,以及安装于所述气缸体内的活塞,还包括与所述活塞连接的两个镜像设置的曲柄块,以及分别与各所述曲柄块相连的手指夹块,各所述曲柄块分别经由转轴连接于所述气缸体上。
8.作为对上述技术方案的进一步限定,所述第一夹取组件还包括安装于所述第一连接组件上的伸缩气缸,所述手指气缸连接于所述伸缩气缸的气缸头上。
9.作为对上述技术方案的进一步限定,所述第二夹取组件包括安装于所述第二连接
组件上的下咬合爪组件,以及一端与所述下咬合爪组件铰接的上咬合爪组件;还包括夹紧气缸,所述夹紧气缸包括经由铰接轴铰接于所述下咬合爪组件上的缸体,以及经由安装块与所述上咬合爪组件连接的缸头。
10.作为对上述技术方案的进一步限定,所述下咬合爪组件包括下咬合母板,以及与所述下咬合母板可拆卸的连接的下咬合子板,所述上咬合爪组件包括上咬合母板,以及与所述上咬合母板可拆卸的连接的上咬合子板,于所述下咬合母板和所述上咬合母板上分别开设有供各自的所述下咬合子板和所述上咬合子板插入安装的弧形槽。
11.作为对上述技术方案的进一步限定,于所述下咬合子板和所述上咬合子板的咬合端分别开设有搁置槽。
12.本实用新型的一种基于机器人的柔性橡胶制品自动脱模系统,通过工业机器人、对柔性橡胶制品压模成型的注塑成型机,、脱模用夹具,以及控制工业机器人、注塑成型机以及脱模用夹具三者联动以实现自动脱模的控制模块,能够实现柔性橡胶制品压模成型后的自动脱模,而解决现有技术中手工脱模存在的劳动强度大、生产效率低等问题,且通过移模装置以及顶出装置的设置,能够便于脱模用夹具对压模成型后的柔性橡胶制品夹取。
附图说明
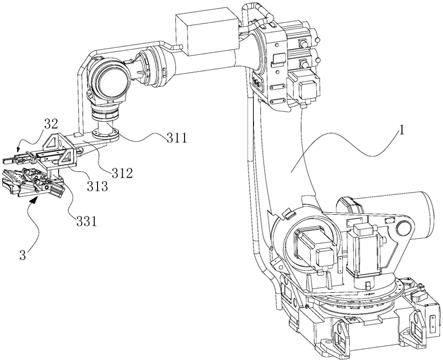
13.图1为本实用新型一种基于机器人的柔性橡胶制品自动脱模系统的工业机器人与脱模用夹具安装结构示意图;
14.图2为本实用新型一种基于机器人的柔性橡胶制品自动脱模系统的合模装置、移模装置与顶出装置的装配结构示意图;
15.图3为图2的部分结构装配结构示意图;
16.图4为本实用新型脱模用夹具的装配结构示意图;
17.图5为本实用新型脱模用夹具的另一角度装配结构示意图;
18.图6为图4的a处局部放大图。
19.图中:
20.1-工业机器人,21-合模装置,211-上模,212-中模,213-模芯,214-下模,22-移模装置,221-移动板,231-顶升液压缸,3-脱模用夹具,31-第一连接组件,311-第一法兰连接器,312-第一连接板,313-第二连接板,32-第一夹取组件,321-手指气缸,322-伸缩气缸,331-第二法兰连接器,34-第二夹取组件,341-下咬合母板,342-下咬合子板,343-上咬合母板,344-上咬合子板,345-弧形槽,346-搁置槽,347-夹紧气缸,348-安装块。
具体实施方式
21.下面结合附图及具体实施例对本实用新型作进一步的详细说明。
22.实施例
23.由图1至图6中所示,一种基于机器人的柔性橡胶制品自动脱模系统,其包括工业机器人1,以及对柔性橡胶制品压模成型的注塑成型机,注塑成型机包括注射装置、塑化装置及具有模芯213的合模装置21,基于机器人的柔性橡胶制品自动脱模系统还包括安装于工业机器人1上的脱模用夹具3,以及控制工业机器人1、注塑成型机以及脱模用夹具3三者联动以实现自动脱模的控制模块,注塑成型机还包括安装于合模装置21下部的移模装置
22,以及将合模装置21的模芯213顶出的顶出装置,脱模用夹具3包括与工业机器人1连接的第一连接组件31,以及安装于第一连接组件31上的、将柔性橡胶制品的注胶口料把夹取的第一夹取组件32;还包括连接于第一连接组件31上的第二连接组件,以及安装于第二连接组件上的、将柔性橡胶制品压模后的成品咬合夹取的第二夹取组件34。
24.具体的,由图2结合图3中所示,合模装置21包括上模211,以及与上模211连接的中模212,还包括下模214,以及活动安装于下模214内的模芯213,移模装置22包括移动板221,以及安装于注塑成型机上以推动移动板221横向移动的移模液压缸,下模214安装于移动板221上,顶出装置包括安装于注塑成型机上的顶升液压缸231,顶升液压缸231将模芯213于下模214内顶出,本实施例中,控制模块包括plc控制器。
25.本实施例中,plc控制器型号为西门子smart sr40,工业机器人1选用新松sr210d,通过工业机器人1携带脱模用夹具3对柔性橡胶制品的注胶口料把、柔性橡胶制品压模后的成品于模芯213上夹取,注塑成型机为在现有技术中的注塑成型机基础上增加了移模装置22及顶出装置,plc控制器能够实现与工业机器人1的控制器的i/o通信,以及与注射成型机的电气i/o通信,以及控制移模液压缸、顶升液压缸231、下述手指气缸321、伸缩气缸322及夹紧气缸347各自的气动电磁阀动作。
26.柔性橡胶制品经由注塑成型机注塑成型后,plc控制器与注塑成型机电气i/o通信,注塑成型机的上模211及中模212上移,移模液压缸推动移动板221带动下模214及模芯213横向移动,后顶升液压缸231将模芯213顶出,以便于脱模用夹具3将柔性橡胶制品的注胶口料把、柔性橡胶制品压模后的成品于模芯213上夹取。
27.由图4至图6中所示,脱模用夹具3,其整体结构包括第一连接组件31、第一夹取组件32、第二连接组件以及第二夹取组件34,具体的,第一夹取组件32安装于第一连接组件31上,能够将柔性橡胶制品的注胶口料把夹取,第二夹取组件34安装于第二连接组件上,能够将柔性橡胶制品压模后的成品咬合夹取,且第一夹取组件32和第二夹取组件34上下间隔排布。
28.脱模用夹具3安装于工业机器人1上,具体的,由图4至图6中所示,第一夹取组件32包括对注胶口料把进行夹取的手指气缸321,当柔性橡胶制品压模完成后,手指气缸321动作,将注胶口料把夹取,为更好的适用于不同操作空间内,第一夹取组件32还包括安装于第一连接组件31上的伸缩气缸322,手指气缸321连接于伸缩气缸322的气缸头上,具体的,手指气缸321包括端部形成有u字形开口的气缸体,以及安装于气缸体内的活塞,还包括与活塞连接的两个镜像设置的曲柄块,以及分别与各曲柄块相连的手指夹块,两个手指夹块平行设置,各曲柄块经由转轴连接于u字形开口处的气缸体上,活塞带动两个曲柄块绕各自的转轴转动,使两个曲柄块的、分别与各自对应的手指夹块相连一端相互靠近或远离,而实现两个手指夹块对注胶口料把夹取或松开。
29.由图4结合图6中所示,第二夹取组件34包括安装于第二连接组件上的下咬合爪组件,以及一端与下咬合爪组件铰接的上咬合爪组件;还包括夹紧气缸347,夹紧气缸347包括经由铰接轴铰接于下咬合爪组件上的缸体,以及经由安装块348与上咬合爪组件连接的缸头,为使效果更佳,夹紧气缸347为两个,两个夹紧气缸347间隔布设于下咬合爪组件和上咬合爪组件的铰接侧,具体的,于下咬合爪组件上安装有多个铰接座,各缸体的两侧分别经由铰接轴铰接于对应位置的铰接座上,本实施例中,安装块348呈v字型设置,一端安装于缸头
处,另一端安装于上咬合爪组件处。
30.为适应于不同的柔性橡胶制品,下咬合爪组件包括下咬合母板341,以及与下咬合母板341可拆卸的连接的下咬合子板342,上咬合爪组件包括上咬合母板343,以及与上咬合母板343可拆卸的连接的上咬合子板344,本实施例中,柔性橡胶制品为滚筒洗衣机的橡胶门封,为便于安装,于下咬合母板341和上咬合母板343上分别开设有供各自的下咬合子板342和上咬合子板344插入安装的弧形槽345,为避免被夹持的成品变形,于下咬合子板342和上咬合子板344的咬合端分别开设有搁置槽346,下咬合子板342与上咬合子板344咬合后,两者的搁置槽346围构成的高度与被夹持的成品外形高度适配。
31.由图4中所示,第一连接组件31包括第一法兰连接器311,以及与第一法兰连接器311连接的第一连接板312;还包括与第一连接板312连接的第二连接板313,伸缩气缸322安装于第二连接板313上,具体的,第一法兰连接器311一端经由法兰与工业机器人1相连,另一端经由法兰与第一连接板312相连,为使结构稳固,第一连接板312的底部安装有加强筋,本实施例中,第二连接板313呈l型设置,于第二连接板313上也安装有加强筋,由图5中所示,第二连接组件包括安装于第二连接板313和第二夹取组件34间的第二法兰连接器331,具体的,第二法兰连接器331连接于第二连接板313与前述下咬合母板341间。
32.以上所述仅为本实用新型较佳实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术构思加以等同替换或改变所得的技术方案,都应涵盖于本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1