一种3D打印水凝胶的应用、仿生粘附器件
一种3d打印水凝胶的应用、仿生粘附器件
技术领域
1.本发明涉及粘附器件技术领域,尤其涉及一种3d打印水凝胶的应用、仿生粘附器件。
背景技术:
2.目前,无论是在工业生产还是在日常生活中,粘附器件都有这广泛的应用前景及强大的市场潜力,包括高档数控机床和机器人、航空航天装备、海洋工程装备及高技术船舶、先进轨道交通装备及农机装备在内的先进机械设备制造领域,均迫切需要我们研制出性能更好的粘附器件来实现更加稳定的自动化生产及安全生产。整体而言,粘附器件相关产业正处在一个良好的发展阶段中,已经成为一个研究和发展的热点行业。
3.而目前发展仿生粘附器件的主要设计来源主要是以聚氨酯橡胶、硅橡胶、丁腈橡胶等作为基体材料,利用模板浇筑的方式制备仿生机械粘附吸盘器件。上述基体材料形成差,制备方法精度差,难以得到力学性能好、粘附力强的粘附器件,严重制约了仿生高精度机械粘附器件的实际应用。
技术实现要素:
4.本发明的目的在于提供一种3d打印水凝胶的应用、仿生粘附器件,所述3d打印水凝胶的用于制备仿生粘附器件时成型好、力学性能好和精度高。
5.为了实现上述发明目的,本发明提供以下技术方案:
6.本发明提供了一种3d打印水凝胶在制备仿生粘附器件中的应用。
7.优选的,所述3d打印水凝胶的拉伸强度为1~20mpa,断裂伸长率为400~1000%。
8.本发明还提供了一种仿生粘附器件,所述仿生粘附器件包括手动仿生水凝胶粘附器件、气动仿生水凝胶粘附器件或智能驱动仿生粘附器件;
9.所述手动仿生水凝胶粘附器件、气动仿生水凝胶粘附器件或智能驱动仿生粘附器件均包括水凝胶粘附结构;
10.所述水凝胶粘附结构通过光固化3d打印的方法制备得到。
11.优选的,所述手动仿生水凝胶粘附器件包括水凝胶粘附结构、夹具和夹具固定套;所述水凝胶粘附结构和夹具通过夹具固定套连接;
12.所述水凝胶粘附结构为水凝胶粘附吸盘。
13.优选的,所述气动仿生水凝胶粘附器件包括水凝胶粘附结构、气缸、驱动控制板和硅胶管;
14.所述水凝胶粘附结构为水凝胶章鱼粘附触手;
15.所述水凝胶粘附结构和气缸通过硅胶管连接;所述驱动控制板与所述气缸电连。
16.优选的,所述智能驱动仿生粘附器件包括远程控制单元和水凝胶粘附结构;
17.所述水凝胶粘附结构包括刺激响应单元和驱动单元;
18.所述刺激响应单元位于所述驱动单元的内部。
19.优选的,所述水凝胶粘附结构的制备方法,包括以下步骤:
20.提供3d打印水凝胶墨水;
21.按照所述水凝胶粘附结构的结构,将所述3d打印水凝胶墨水进行光固化3d打印,得到所述水凝胶粘附结构。
22.优选的,所述水凝胶粘附结构的制备方法,包括以下步骤:
23.提供3d打印水凝胶墨水;
24.按照所述驱动单元的结构,将所述3d打印水凝胶墨水进行光固化3d打印后,得到所述驱动单元;
25.提供包含刺激响应材料的3d打印水凝胶墨水;
26.将所述3d打印墨水滴在所述驱动单元的内壁上,进行光固化后,得到刺激响应单元。
27.优选的,所述刺激响应材料包括金纳米颗粒、n-异丙基丙烯酰胺或纳米四氧化三铁。
28.优选的,所述光固化3d打印采用的光源波长为385~405nm,每层曝光时间为5~60s,切片厚度为0.05~0.1mm。
29.本发明提供了一种3d打印水凝胶在制备仿生粘附器件中的应用。在本发明中,所述3d打印水凝胶具有三维聚合物网络结构,其中填充了大量的结合水、界面水和自由水,表现出类固体和类流体的双重特性。同时,水凝胶本身基于水凝胶独特的柔软、湿滑、刺激响应、生物兼容以及物质输运交换等理化性能,使其在制备仿生粘附器件时精度更高,设计性更好,粘附力更高;
30.本发明还提供了一种仿生粘附器件,所述仿生粘附器件包括手动仿生水凝胶粘附器件、气动仿生水凝胶粘附器件或智能驱动仿生粘附器件;所述手动仿生水凝胶粘附器件、气动仿生水凝胶粘附器件或智能驱动仿生粘附器件均包括水凝胶粘附结构;
31.所述水凝胶粘附结构通过光固化3d打印的方法制备得到。
32.以现有技术相比,本发明所述的仿生粘附器件具有一下有益效果:
33.1)本发明提供的仿生粘附器件,相比较于目前已报道的粘附器件材料,该水凝胶基的仿生粘附器件具有独特的水环境适应性,具有良好的耐压性能,优异的力学性能。相比较于目前已报道的粘附器件制造方法,如灌注法、模板法等,该方法具有工艺简单、价格低廉、可设计性高、制造自由度高等优点。所制备的仿生粘附器件展现出优异的粘附性能、力学性能和智能控制能力,有望应用于水下探测、医疗保健和柔性机器人等领域;
34.2)本发明提供的基于所述3d打印水凝胶材料的不同结构仿生粘附器件,相比较于目前已报道的粘附器件,该方法制备的粘附器件具有多种不同的结构以及驱动方式,可以满足多种使用条件。所制备的不同结构仿生粘附器件展现出优异的驱动性能、粘附性能和实用性能。
附图说明
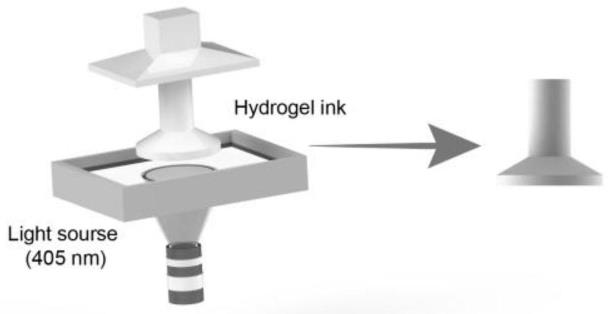
35.图1为本发明所述水凝胶粘附结构的制备过程;
36.图2为本发明手动仿生水凝胶粘附器件(不包括夹具和固定套)的实物图;
37.图3为本发明所述水凝胶章鱼粘附触手的实物图;
38.图4为实施例1制备得到的水凝胶材料的力学性能表征图;
39.图5为本发明所述吸盘的结构示意图;
40.图6为利用桌面级拉伸机对实施例3所述手动仿生水凝胶粘附器件进行粘附性测试的结果图;
41.图7为本发明所述手动仿生水凝胶粘附器件的结构示意图,其中,101-夹具、102-夹具固定套,103-水凝胶吸盘;
42.图8为本发明所述气动仿生水凝胶粘附器件的结构示意图,其中,201-水凝胶章鱼粘附触手,202-气缸,203-驱动控制板和204-硅胶管;
43.图9为本发明所述能驱动仿生粘附器件中水凝胶粘附结构的结构示意图,其中,301-驱动单元,302-刺激响应单元。
具体实施方式
44.本发明提供了一种3d打印水凝胶在制备仿生粘附器件中的应用。
45.在本发明中,所述3d打印水凝胶的拉伸强度优选为1~20mpa,更优选为5~20mpa,最优选为10~20mpa;断裂伸长率优选为400~1000%,更优选为500~900%,最优选为600~800%。
46.本发明对所述3d打印水凝胶的种类没有任何特殊的限定,采用本领域技术人员熟知的并能够满足上述力学性能的要求即可。
47.在本发明的具体实施例中,所述3d打印水凝胶优选通过制备得到,制备所述3d打印水凝胶的3d打印水凝胶墨水的制备方法具体为:将丙烯酰胺(15.975g)和丙烯酸(1.459g)通过磁力搅拌溶于二甲亚砜(15ml)和去离子水(35ml)混合溶液中,随后加入n,n-亚甲基双丙烯酰胺(0.038g)、苯基(2,4,6-三甲基苯甲酰基)磷酸锂盐(lap,0.0872g)、柠檬黄(0.015g),搅拌使其溶解,得到3d打印水凝胶墨水;
48.或将丙烯酰胺(15.975g)和n-丙烯酰基甘胺酰胺(10g)通过磁力搅拌溶于二甲亚砜(25ml)和去离子水(25ml)混合溶液中,随后加入聚乙二醇二丙烯酸酯(pegda750,0.076g)、lap(0.0872g)和柠檬黄(0.03g),搅拌使其溶解,得到3d打印水凝胶墨水。
49.本发明还提供了一种仿生粘附器件,所述仿生粘附器件包括手动仿生水凝胶粘附器件、气动仿生水凝胶粘附器件或智能驱动仿生粘附器件;
50.所述手动仿生水凝胶粘附器件、气动仿生水凝胶粘附器件或智能驱动仿生粘附器件均包括水凝胶粘附结构;
51.所述水凝胶粘附结构通过光固化3d打印的方法制备得到。
52.在本发明中,所述水凝胶粘附结构的拉伸强度优选为1~20mpa,更优选为5~20mpa,最优选为10~20mpa;断裂伸长率优选为400~1000%,更优选为500~900%,最优选为600~800%。
53.在本发明中,所述手动仿生水凝胶粘附器件优选包括水凝胶粘附结构、夹具和夹具固定套;所述水凝胶粘附结构和夹具通过夹具固定套连接(结构示意图如图7所示,实物图如图2所示);在本发明中,所述水凝胶粘附结构优选为水凝胶粘附吸盘。
54.在本发明中,所述水凝胶粘附吸盘的结构优选为喇叭状结构。所述水凝胶粘附吸盘的半径优选为3.25~6.75mm,更优选为3.25、5.00或6.75mm(如图5所示r);所述水凝胶粘
附吸盘的倾角优选为10~50
°
,更优选为15
°
、25
°
、30
°
或45
°
(如图5所示θ);所述水凝胶粘附吸盘的厚度优选为0.5~2.0mm,更优选为0.90、1.00、1.25或1.50mm(如图5所示l)。
55.在本发明中,所述气动仿生水凝胶粘附器件包括水凝胶粘附结构、气缸、驱动控制板和硅胶管;所述水凝胶粘附结构为水凝胶章鱼粘附触手(实物图如图3所示);所述水凝胶粘附结构和气缸通过硅胶管连接;所述驱动控制板与所述气缸电连(如图8所示)。
56.如图3所示,在本发明中,所述水凝胶章鱼粘附触手包括仿生章鱼角和以阵列的形式设置在与所述仿生章鱼角上的吸盘;所述吸盘的半径、倾角和厚度优选参考上述技术方案所述的水凝胶粘附吸盘的参数限定,在此不再进行赘述。
57.在本发明中,所述智能驱动仿生粘附器件包括远程控制单元和水凝胶粘附结构(实物图如图9中a~c);所述水凝胶粘附结构包括刺激响应单元(如图9中d所示302)和驱动单元(如图9中d所示301);所述刺激响应单元位于所述驱动单元的内部。在本发明中,所述驱动单元优选为吸盘结构,所述刺激响应单元优选位于所述吸盘结构的内顶部。在本发明中,所述远程控制单元优选为红外激光器、绿色激光器或磁场发生器。
58.在本发明中,当所述仿生粘附器件为手动仿生水凝胶粘附器件或气动仿生水凝胶粘附器件时,所述水凝胶粘附结构的制备方法,优选包括以下步骤:
59.提供3d打印水凝胶墨水;
60.按照所述水凝胶粘附结构的结构,将所述3d打印水凝胶墨水进行光固化3d打印,得到所述水凝胶粘附结构。
61.在本发明中,若无特殊说明,所有制备原料均为本领域技术人员熟知的市售产品。
62.本发明提供3d打印水凝胶墨水。
63.本发明对所述3d打印水凝胶墨水没有任何特殊的限定,能够保证制备得到的水凝胶材料的力学性能满足拉伸强度为1~20mpa,断裂伸长率为400~1000%的要求即可。
64.在本发明的具体实施例中,所述3d打印水凝胶墨水的制备方法优选为将丙烯酰胺(15.975g)和丙烯酸(1.459g)通过磁力搅拌溶于二甲亚砜(15ml)和去离子水(35ml)混合溶液中,随后加入n,n-亚甲基双丙烯酰胺(0.038g)、苯基(2,4,6-三甲基苯甲酰基)磷酸锂盐(lap,0.0872g)、柠檬黄(0.015g),搅拌使其溶解,得到3d打印水凝胶墨水;
65.或将丙烯酰胺(15.975g)和n-丙烯酰基甘胺酰胺(10g)通过磁力搅拌溶于二甲亚砜(25ml)和去离子水(25ml)混合溶液中,随后加入聚乙二醇二丙烯酸酯(pegda750,0.076g)、lap(0.0872g)和柠檬黄(0.03g),搅拌使其溶解,得到3d打印水凝胶墨水。
66.得到所述3d打印水凝胶墨水后,本发明按照所述仿生粘附器件的结构,将所述3d打印水凝胶墨水进行光固化3d打印,得到所述水凝胶粘附结构。
67.在本发明中,所述光固化3d打印的过程优选为利用三维建模软件solidworks对仿生粘附器件的结构进行设计并构建器件模型,然后将构建的水凝胶粘附结构模型倒入商用dlp3d打印进行打印参数优化处理并进行打印。
68.在本发明中,所述光固化3d打印的光源强度优选为200~300mw,更优选为250~280mw;光源波长优选为385~405nm;每层的曝光时间优选为5~60s,更优选为10~50s;其中,底层的曝光时间优选为10~50s,更优选为20~25s,其余层的曝光时间优选为3~15s,更优选为8~10s;切片的后度优选为0.05~0.1mm,更优选为0.08~0.1mm,最优选为0.1mm。
69.所述光固化3d打印完成后,本发明还优选包括将得到的水凝胶粘附结构置于氯氧
化锆水溶液(0.1mol/l)中浸泡48h,然后放入去离子水中浸泡48h。在本发明中,上述处理的目的优选为通过金属离子配位和溶剂交换使水凝胶形成致密的网络结构,进而提升水凝胶的力学性能。
70.在本发明中,当所述仿生粘附器件为智能驱动仿生粘附器件时,所述水凝胶粘附结构的制备方法,优选包括以下步骤:
71.提供3d打印水凝胶墨水;
72.按照所述驱动单元的结构,将所述3d打印水凝胶墨水进行光固化3d打印后,得到所述驱动单元;
73.提供包含刺激响应材料的3d打印水凝胶墨水;
74.将所述3d打印墨水滴在所述驱动单元的内壁上,进行光固化后,在第二氯氧化锆水溶液中进行浸渍,得到刺激响应单元。
75.在本发明中,制备驱动单元的过程优选参考上述水凝胶粘附结构的制备过程,在此不再进行赘述。
76.得到驱动单元后,本发明提供包含刺激响应材料的3d打印水凝胶墨水。
77.在本发明中,所述刺激响应材料优选包括金纳米颗粒、n-异丙基丙烯酰胺或四氧化三铁。
78.在本发明中,所述包含刺激响应材料的3d打印水凝胶墨水中的刺激响应材料的浓度优选为0.005~0.1mol/l,更优选为0.02~0.1mol/l,最优选为0.05mol/l。
79.本发明对所述包含刺激响应材料的3d打印水凝胶墨水的制备过程没有任何特殊的限定,采用本领域技术人员熟知的过程进行即可。
80.在本发明的具体实施例中,所述刺激响应材料为金纳米颗粒,所述包含刺激响应材料的3d打印水凝胶墨水的制备方法优选为将丙烯酰胺(15.975g)、丙烯酸(1.459g)、nipam(1g)和金纳米颗粒溶胶(10ml,浓度为0.05mol/l)通过磁力搅拌溶于二甲亚砜(15ml)和去离子水(35ml)的混合溶液中,随后加入n,n-亚甲基双丙烯酰胺(0.038g)、lap(0.0872g)和柠檬黄(0.015g),搅拌使其溶解,得到所述包含刺激响应材料的3d打印水凝胶墨水。
81.得到包含刺激响应材料的3d打印水凝胶墨水后,本发明将所述3d打印墨水滴在所述驱动单元的内壁上,进行光固化后,得到刺激响应单元。
82.在本发明中,所述光固化的光源强度优选为200~300mw,更优选为250~280mw;光源波长优选为385~405nm;时间优选为5~60s,更优选为20~30s。
83.所述光固化完成后,本发明还优选包括将所述光固化得到的器件在氯氧化锆水溶液中进行浸渍。在本发明中,所述氯氧化锆水溶液的浓度优选为0.1mol/l,浸渍时间优选为48h;在所述氯氧化锆水溶液中浸渍完成后,本发明还优选包括在去离子水中浸泡48h。
84.本发明对所述仿生粘附器件的制备方法没有任何特殊的限定,采用本领域技术人员熟知的组装方式进行组装即可。
85.下面结合实施例对本发明提供的3d打印水凝胶的应用、仿生粘附器件进行详细的说明,但是不能把它们理解为对本发明保护范围的限定。
86.实施例1
87.将丙烯酰胺(15.975g)和丙烯酸(1.459g)通过磁力搅拌溶于二甲亚砜(15ml)和去
离子水(35ml)混合溶液中,随后加入n,n-亚甲基双丙烯酰胺(0.038g)、lap(0.0872g)、柠檬黄(0.015g),搅拌使其溶解,得到3d打印水凝胶墨水;
88.将所述3d打印水凝胶墨水放入光滑滑3d打印机料盒中,利用光固化3d打印机按照模型程序打印成型(3d打印机光源强度为250mw,切片层厚为0.1mm,底层曝光时间为25s,其余层曝光时间为10s),可得到化学交联的水凝胶材料。
89.将所述化学交联的水凝胶材料浸泡在氯氧化锆水溶液(0.1mol/l)中48小时后,放入去离子水中浸泡48小时,得到水凝胶材料(物理化学交联)。
90.利用万能材料试验机,将所述水凝胶材料进行力学性能测试,测试结果如图4所示,由图4可知,所述水凝胶材料在应变为448
±
48%时,拉伸强度达到2.18
±
0.28mpa,由所述应变曲线计算得到所述水凝胶材料的弹性模量为0.830
±
0.012mpa。
91.实施例2
92.将丙烯酰胺(15.975g)和n-丙烯酰基甘胺酰胺(10g)通过磁力搅拌溶于二甲亚砜(25ml)和去离子水(25ml)混合溶液中,随后加入聚乙二醇二丙烯酸酯(pegda750,0.076g)、lap(0.0872g)和柠檬黄(0.03g),搅拌使其溶解,得到3d打印水凝胶墨水;
93.将所述3d打印水凝胶墨水放入光固化3d打印机料盒中,利用光固化3d打印机按照模型程序打印成型(3d打印机光源强度为280mw,切片层厚为0.1mm,底层曝光时间为20s,其余层曝光时间为8s),得到具水凝胶材料。
94.实施例3
95.3d打印水凝胶墨水的制备参考实施例1;
96.利用三维建模软件solidworks对水凝胶粘附结构的结构(如图7所示)进行设计并构建器件模型,然后将构建的仿生粘附器件模型导入商用dlp3d打印进行打印参数优化处理并进行打印(3d打印机光源强度为250mw,切片层厚为0.1mm,底层曝光时间为25s,其余层曝光时间为10s)后,置于氯氧化锆水溶液(0.1mol/l)中浸泡48h,然后放入去离子水中浸泡48h,可得到图7中103所示的水凝胶粘附结构(吸盘,厚度为1.00mm,半径为5.00mm,角度为30℃(如图5所示));
97.按照图7所示的结构将夹具、夹具固定套和所述水凝胶粘附结构进行组装,得到手动仿生水凝胶粘附器件;
98.利用桌面级拉伸机对所述手动仿生水凝胶粘附器件进行粘附性测试(如图6所示),测试过程为:先提供预紧力并保持一定时间使粘附器件充分接触,然后逐渐提升直至玻璃,以传感器显示的最大力作为粘附力,所述手动仿生水凝胶粘附器件的粘附力为45kpa,说明所述手动仿生水凝胶粘附器件具有优异的粘附性能,拥有应用于水下探测、医疗保健和柔性机器人等领域的潜力。
99.实施例4
100.3d打印水凝胶墨水的制备参考实施例1;
101.利用三维建模软件solidworks对水凝胶粘附结构的结构(实物图如图3所示)进行设计并构建器件模型,然后将构建的水凝胶粘附结构模型导入商用dlp3d打印进行打印参数优化处理并进行打印(打印参数为:3d打印机光源强度为250mw,切片层厚为0.1mm,底层曝光时间为25s,其余层曝光时间为10s)后,置于氯氧化锆水溶液(0.1mol/l)中浸泡48h,然后放入去离子水中浸泡48h,可得到图3所示的水凝胶粘附结构(水凝胶章鱼粘附触手);
102.按照图8所示的结构,将所述水凝胶粘附结构、气缸、驱动控制板和硅胶管进行组装,所述水凝胶粘附及气缸通过硅胶管连接,所述气缸与驱动控制板电连,得到气动仿生章鱼粘附器件;
103.所述驱动控制板控制所述气缸正向驱动,然后通过所述硅胶管控制所述水凝胶章鱼粘附触手运动,从而粘附抓取所需抓取的物体,移动至指定位置后,所述驱动控制板控制所述气缸反向驱动,通过所述硅胶管控制所述水凝胶章鱼粘附触手运动,从而接触粘附释放抓取的物体。
104.实施例5
105.将丙烯酰胺(15.975g)、丙烯酸(1.459g)通过磁力搅拌溶于二甲亚砜(15ml)和去离子水(35ml)混合溶液中,随后加入n,n-亚甲基双丙烯酰胺(0.038g)、lap(0.0872g)和柠檬黄(0.015g),搅拌使其溶解,得到3d打印水凝胶墨水;
106.将所述3d打印水凝胶墨水放入光固化3d打印机料盒中,利用光固化3d打印机按照图9所述的301的结构程序打印成型(3d打印机光源强度为300mw,切片层厚为0.1mm,底层曝光时间为22s,其余层曝光时间为6s)后,浸泡在氯氧化锆水溶液(0.1mol/l)中48小时后,放入去离子水中浸泡48小时,得到驱动单元;
107.将丙烯酰胺(15.975g)、丙烯酸(1.459g)、nipam(1g)和金纳米颗粒溶胶(10ml,浓度为0.05mol/l)通过磁力搅拌溶于二甲亚砜(15ml)和去离子水(35ml)的混合溶液中,随后加入n,n-亚甲基双丙烯酰胺(0.038g)、lap(0.0872g)和柠檬黄(0.015g),搅拌使其溶解,得到包含刺激响应材料的3d打印水凝胶墨水;
108.将所述包含刺激响应材料的3d打印水凝胶墨水滴入所述驱动单元的内壁,通过紫外灯快速固化30s(紫外波长为365~405nm)后,浸泡在氯氧化锆水溶液(0.1mol/l)中48小时后,放入去离子水中浸泡48小时,浸泡在氯氧化锆水溶液(0.1mol/l)中48小时后,放入去离子水中浸泡48小时,得到刺激响应单元(如图9中的302所示),即水凝胶粘附结构(未粘附前的剖面视图如图9d所示);
109.将所述水凝胶粘附结构与远程控制单元连接,得到智能驱动仿生粘附器件;将所述水凝胶粘附结构通过外力粘附在待粘附物上(如图9e所示粘附状态),通过所述远程控制单元控制对所述水凝胶粘附结构进行外部绿色激光等照射,由于所述刺激响应单元中金纳米粒子的存在具有一定的光热效应导致所述刺激响应单元收缩(如图9f所示),实现智能控制接触粘附的目的。
110.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1