一种废液贮罐淤泥回取机器人机构
1.本发明属于工业智能装备领域,具体地说是一种废液贮罐淤泥回取机器人机构。
背景技术:
2.淤泥回取是废液贮罐清理的主要工作之一。贮罐内底部存有淤泥与少量残留废水目前仍未处理,为减少对环境的危害,需要对废液贮罐进行清理;而现有的作业技术下,通常是专业人员采用人工作业方式进行清理,劳动强度大、环境恶劣对工作人员具有一定危害。
技术实现要素:
3.为了解决现有废液贮罐淤泥回取采用人工回收、清理而存在的问题,本发明提供一种废液贮罐淤泥回取机器人机构。该废液贮罐淤泥回取机器人机构解决了人工清淤、回收作业存在的劳动强度大,工作环境恶劣等问题,能够代替作业工人完成废液贮罐淤泥回取作业,提高了清淤效率,降低劳动强度。
4.本发明是采用以下的技术方案实现的:一种废液贮罐淤泥回取机器人机构,包括移动平台机构及分别安装于所述移动平台机构上的控制箱、吸尘装置、回收装置、振动装置、破碎装置和清扫装置,所述吸尘装置、回收装置、振动装置、破碎装置和清扫装置分别与所述控制箱连接,通过控制箱控制各装置动作执行;回收装置、振动装置、破碎装置和清扫装置设计为模块化,能够实现各模块之间的快速切换,能够完成废液贮罐中淤泥的破碎、回收、清扫一系列任务,实现单台机器人完成不同的作业任务,满足作业空间小、作业任务复杂的需求。
5.所述回收装置、振动装置、破碎装置和清扫装置分别通过第一连接板、第二连接板、第三连接板、第四连接板与移动平台机构进行固定安装,分别将第一连接板、第二连接板、第三连接板、第四连接板挂到挂钩上,然后通过快拆机构进行固定,实现回收装置、振动装置、破碎装置和清扫装置的快速切换,实现一台机器人完成不同作业任务的需求,通过对回收装置、振动装置、破碎装置和清扫装置的控制,有效的对废液贮罐淤泥进行回收与清扫;
6.所述第二连接板、第三连接板、第四连接板安装在移动平台机构的前端,并且实现振动装置、破碎装置和清扫装置快速更换,第一连接板安装在移动平台机构的后端,实现回收装置将振动装置、破碎装置生成淤泥的回收,通过清扫装置和吸尘装置将残余的粉尘进行清扫和回收,从而实现废液贮罐淤泥回取。
7.进一步的,所述移动平台机构包括车身、底盘、快拆机构、挂钩、第五连接板、麦克纳姆轮以及摄像头;
8.所述麦克纳姆轮通过电机驱动实现移动平台的全方位移动,连接在底盘上;车身固连在底盘上,快拆机构、挂钩分别固定在车身上,第五连接板安装在挂钩上,通过快拆机构实现固定;摄像头固定在车身上,能够完成对周围环境的检测和自主导航功能。
9.进一步的,所述振动装置包括第二连接板、第四电动推杆、弹簧、振动电机、破碎轮及支架;支架通过铰链与第二连接板相连,第四电动推杆两端通过铰链与第二连接板、支架相连,振动电机、破碎轮与支架固定,破碎轮上具有凹槽;第四电动推杆的伸缩实现振动装置的升降,振动电机将振动通过支架传给破碎轮,能够巧妙实现干结淤泥的破碎,弹簧起到将第四电动推杆与振动电机隔振的作用,避免振动对第四电动推杆进行损坏。
10.进一步的,所述破碎装置包括第三连接板、第五电动推杆、第一电机、破碎刀、同步带传动链及支撑板;第五电动推杆两端通过铰链与第三连接板、支撑板连接;破碎刀轴连接在支撑板;第五电动推杆的伸缩实现破碎装置的升降,第一电机通过同步带传动链带动破碎刀旋转,实现对松软淤泥的破碎。
11.进一步的,所述回收装置包括第一连接板、第二电动推杆、第三电动推杆、铲斗、连接轴及支撑板;
12.所述第二电动推杆两端通过铰链与第一连接板、连接轴相连接;第三电动推杆两端通过铰链与铲斗、连接轴相连接;通过第二电动推杆的伸缩实现铲斗的升降,通过第三电动推杆的伸缩实现铲斗的旋转,从而实现回收装置将淤泥回收的作用。
13.进一步的,所述清扫装置包括第四连接板、第六电动推杆、第二电机、第三电机、支撑杆及钢丝刷、钢丝刷;第六电动推杆两端通过铰链与第四连接板、支撑杆连接;第六电动推杆的伸缩实现清扫装置的升降,通过第二电机、第三电机分别带动钢丝刷高速旋转,将废液贮罐表面残余的淤泥及粉尘进行清扫,并汇集到车底,通过后续的吸尘装置完成对粉尘的回收。
14.进一步的,所述吸尘装置包括储存装置、第一电动推杆和吸口;所述储存装置通过铰链连接在车身上,通过第一电动推杆的伸缩控制储存装置的倾斜,控制实现储存粉尘的卸载;储存装置与吸口通过软管连接,有效地将粉尘通过吸口吸入到储存装置中。
15.进一步的,所述储存装置包括储存箱体、储存口、过滤网、隔断、吸尘电机、舵机、同步带传动链以及密封盖组成;
16.所述过滤网、吸尘电机通过隔断固定在储存箱体上,密封盖与储存箱体通过铰链相连,舵机与储存箱体固定,通过同步带传动链带动密封盖实现开合;控制吸尘电机的运行将残余粉尘吸入储存箱体中,通过过滤网有效地将残余粉尘收留在储存箱体中;当回收的残余分成达到一定量时,控制舵机带动密封盖实现开合,结合第一电动推杆实现储存粉尘的卸载,从而能够完成废液贮罐中粉尘的吸收、存储及转运、卸载任务。
17.与现有技术相比,本发明的优点和积极效果在于:
18.1.本发明能够代替作业人员完成废液贮罐淤泥回取工作,减轻劳动强度,降低危险性,提高工作效率。
19.2.本发明采用多种作业工具快速替换的方式,通过一个机器人对废液贮罐淤泥进行破碎、回收、清理,本发明结构紧凑、体积小,实现一机多用的功能,满足废液贮罐空间小、作业任务多的要求。
附图说明
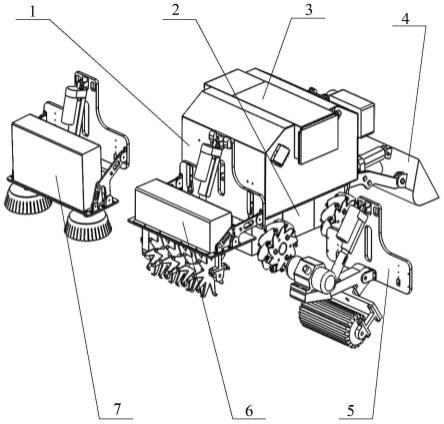
20.图1为本发明的立体结构示意图;
21.图2为本发明移动平台机构的立体机构示意图;
22.图3为本发明吸尘装置的立体机构示意图;
23.图4为图3中储存装置的立体机构示意图;
24.图5为本发明回收装置的立体机构示意图;
25.图6为本发明振动装置的立体机构示意图;
26.图7为本发明破碎装置的立体机构示意图;
27.图8为本发明清扫装置的立体机构示意图;
28.其中:1、移动平台机构;101、车身;102、快拆机构;103、挂钩;104、第五连接板;106、麦克纳姆轮;107、摄像头;105、底盘;2、控制箱;3、吸尘装置;301、储存装置;3011、储存箱体;3012、储存口;3013、过滤网;3014、隔断;3015、吸尘电机;3016、舵机;3017、同步带传动链;3018、密封盖;302、第一电动推杆;303、吸口;4、回收装置;401、第一连接板;402、第二电动推杆;403、第三电动推杆;404、铲斗;405、连接轴;406、第一支撑板;5、振动装置;501、第二连接板;502、第四电动推杆;503、弹簧;504、振动电机;505、破碎轮;506、支架;6、破碎装置;601、第三连接板;602、第五电动推杆;603、第一电机;604、破碎刀;605、同步带传动链;606、第二支撑板;7、清扫装置;701、第四连接板;702、第六电动推杆;703、第二电机;704、第三电机;705、支撑杆;706、第一钢丝刷;707、第二钢丝刷。
具体实施方式
29.为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图及实施例对本发明做进一步说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开的具体实施例。
30.本实施例提出一种废液贮罐淤泥回取机器人机构,如图1所示,包括移动平台机构1及分别安装于该移动平台机构1上的控制箱2、吸尘装置3、回收装置4、振动装置5、破碎装置6和清扫装置7,该吸尘装置3、回收装置4、振动装置5、破碎装置6和清扫装置7分别与所述控制箱2连接,通过控制箱2控制各装置动作执行;所述回收装置4、振动装置5、破碎装置6和清扫装置7分别通过第一连接板401、第二连接板501、第三连接板601、第四连接板701与移动平台机构1进行固定安装,分别将第一连接板401、第二连接板501、第三连接板601、第四连接板701挂到挂钩103上,然后通过快拆机构102进行固定;其中第二连接板501、第三连接板601、第四连接板701安装在移动平台机构1的前端,并且可以实现振动装置5、破碎装置6和清扫装置7快速更换,第一连接板401安装在移动平台机构1的后端,实现回收装置4将振动装置5、破碎装置6生成的淤泥进行回收,通过清扫装置7和吸尘装置3将残余的粉尘进行清扫和回收,从而实现废液贮罐淤泥回取;所述回收装置4、振动装置5、破碎装置6和清扫装置7能够通过快拆机构102进行快速地安装与拆卸,实现作业工具的快速切换,保证一台机器人完成不同的作业任务;所述振动装置5、破碎装置6快速切换,能够针对不同的淤泥硬度实现有效破碎。
31.本实施例中,如图2所示,所述移动平台机构1包括车身101、底盘105、快拆机构102、挂钩103、第五连接板104、麦克纳姆轮106以及摄像头107,所述麦克纳姆轮106连接在底盘105上;车身101固连在底盘105上,快拆机构102、挂钩103以及摄像头107分别固定在车身101上,第五连接板104安装在挂钩103上,通过快拆机构102实现固定,通过麦克纳姆轮
106实现移动平台机构1的全方位运动,通过摄像头107监测周围环境,实现机器人的自主定位、导航。
32.如图3所示,本实施例的吸尘装置3包括储存装置301、第一电动推杆302和吸口303,所述储存装置301与吸口303通过软管连接,有效地将粉尘通过吸口303吸入到储存装置301中,完成粉尘的存储;储存装置301通过铰链连接在车身101上,通过第一电动推杆302的伸缩控制储存装置301的倾斜,控制实现储存粉尘的卸载。
33.如图4所示,本实施例的储存装置301包括储存箱体3011、储存口3012、过滤网3013、隔断3014、吸尘电机3015、舵机3016、同步带传动链3017以及密封盖3018组成,控制吸尘电机3015的运行将残余粉尘吸入储存箱体3011中,通过过滤网3013将残余粉尘收留在储存箱体3011中;当回收的残余粉尘达到一定量时,控制舵机3016通过同步带传动链3017带动密封盖3018实现开合,结合第一电动推杆302实现储存粉尘的卸载。
34.如图5所示,本实施例的回收装置4包括第一连接板401、第二电动推杆402、第三电动推杆403、铲斗404、连接轴405及第一支撑板406;所述第二电动推杆402两端通过铰链与第一连接板401、连接轴405相连接;第三电动推杆403两端通过铰链与铲斗404、连接轴405相连接;通过第二电动推杆402的伸缩实现铲斗404的升降,通过第三电动推杆403的伸缩实现铲斗404的旋转,从而实现回收装置4将淤泥回收的作用。
35.如图6所示,本实施例的振动装置5包括第二连接板501、第四电动推杆502、弹簧503、振动电机504、破碎轮505及支架506;支架506通过铰链与第二连接板501相连,第四电动推杆502两端通过铰链与第二连接板501、支架506相连,振动电机504、破碎轮505与支架506固定;第四电动推杆502的伸缩实现振动装置5的升降,振动电机504将振动通过支架506传给破碎轮505,实现干结淤泥的破碎,弹簧503起到将第四电动推杆502与振动电机504隔振的作用,避免振动对第四电动推杆502进行损坏。
36.如图7所示,本实施例的破碎装置6包括第三连接板601、第五电动推杆602、第一电机603、破碎刀604、同步带传动链605及第二支撑板606;第五电动推杆602两端通过铰链与第三连接板601、支撑板606连接;破碎刀604轴连接在支撑板606;第五电动推杆602的伸缩实现破碎装置6的升降,第一电机603通过同步带传动链605带动破碎刀604旋转,实现对松软淤泥的破碎。
37.如图8所示,本实施例的清扫装置7包括第四连接板701、第六电动推杆702、电机703、电机704、支撑杆705及第一钢丝刷706、钢丝刷707;第六电动推杆702两端通过铰链与第四连接板701、支撑杆705连接;第六电动推杆702的伸缩实现清扫装置7的升降,通过电机703、电机704分别带动第一钢丝刷706、钢丝刷707高速旋转,将废液贮罐表面残余的淤泥及粉尘进行清扫。
38.下面对废液贮罐淤泥破碎、回收及清理原理介绍如下:
39.将废液贮罐淤泥回取机器人机构放入贮罐中,客户端通过控制箱2向废液贮罐淤泥回取机器人机构下发工作指令,摄像头107工作,检测周围的环境。根据摄像头107反馈的环境判断淤泥的状况,利用快拆机构102实现振动装置5或破碎装置6的快速切换,从而保证对不同淤泥进行破碎;然后通过回收装置4将破碎的淤泥回收到所需要的位置,最后通过清理装置7进行残留粉尘处理,通过第一钢丝刷706、钢丝刷707对贮罐表面进行清理,并开启吸尘装置3,将粉尘吸入到储存箱体3011中,后通过第一电动推杆302将储存箱体3011倾斜,
密封盖3018打开,将吸入的粉尘倒出到所需要的位置,从而完成淤泥的破碎、回收和清理,中间振动装置5、破碎装置6及清理装置7通过快拆机构102进行快速切换,完成所需要的任务,实现一台机器人完成多项作业任务的需求。
40.本发明方案能够完成废液贮罐淤泥回收清理工作,可以放置于废液贮罐中代替作业工人完成淤泥回收清理工作,降低安全风险,提高作业效率。
41.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1