一种基于机器视觉的金属管道激光除锈机器人及方法
1.本发明涉及激光除锈技术领域,具体为一种基于机器视觉的金属管道激光除锈机器人及方法。
背景技术:
2.生锈是一种常见的化学反应,其本质是金属的氧化反应。目前,金属管道在使用过程中,由于管道内部长期浸泡在水中,因此生锈在所难免。金属管道生锈不仅会影响管道内部的水质,同时也降低了管道的使用寿命,因此除锈工作非常重要。现如今,激光除锈是一种新型的除锈方式,其利用激光发射器发出特定波长的激光照射锈迹,即可使金属表面的锈迹消失,不仅高效,而且适用于各种形状的金属工件。其原理是利用高频高能激光脉冲照射工件表面,涂覆层可以瞬间吸收聚焦的激光能量,使表面的油污、锈斑或涂层发生瞬间蒸发或剥离,高速有效地清除表面附着物或表面涂层。
3.目前,针对竖直金属管道的内壁除锈工作在具体展开时存在一定的困难,工作人员往往需要将竖直管道拆下,并将管道平放在地面上,然后再将除锈工具伸入管道内进行除锈。此种方式需要拆装管道,因此异常麻烦,为了在不拆卸管道的同时也能对管道内壁进行除锈,我们提出了一种基于机器视觉的金属管道激光除锈机器人及方法以良好的解决上述弊端。
技术实现要素:
4.本发明的目的在于提供一种基于机器视觉的金属管道激光除锈机器人及方法,用于解决上述背景技术中提出的问题。
5.本发明是通过以下技术方案得以实现的:
6.一种基于机器视觉的金属管道激光除锈机器人,包括机器人本体、摄像机构、除锈机构和控制器;
7.所述机器人本体包括载台以及固定连接在所述载台上下两面的两块底座,两块所述底座的相背面均固定设置有立柱,所述底座的外围均匀设置有收纳部,所述收纳部的底端与所述底座转动连接,所述收纳部的顶部转动连接有滚动轮,且所述收纳部为中空结构,所述收纳部的内侧设有用于驱动所述滚动轮旋转的驱动组件,所述立柱为中空结构,所述立柱上设有用于调节所述收纳部倾角的收纳组件,用于控制所述收纳部展开或收纳;
8.所述摄像机构包括安装盒和均匀设置所述安装盒外周壁上的拍摄相机,所述安装盒固定连接在位于上方的一根所述立柱的顶端,所述拍摄相机与所述控制器电连接,用于获取管道内的图像信息,并将图像信息输出给控制器;
9.所述除锈机构包括旋转盒、固定连接在旋转盒顶面的舵机云台以及固定安装在所述舵机云台的输出端的激光发射器,所述旋转盒转动连接在所述安装盒的上方;所述控制器设置在所述安装盒内。
10.可选的,所述驱动组件包括转动轴、固定套接在转动轴外部的蜗轮以及位于收纳
部内侧的第一电机和蜗杆,所述转动轴与所述收纳部转动配合,所述转动轴的两端均伸出至收纳部的外侧并同轴连接有滚动轮,所述第一电机的输出轴与所述蜗杆同轴连接,且所述蜗杆与所述蜗轮啮合设置。
11.可选的,所述收纳组件包括升降气缸、活动部以及和所述收纳部一一对应的连杆,所述升降气缸的缸体固定连接在所述立柱的内部,所述升降气缸的活塞杆与所述活动部连接,所述立柱的外周壁上贯穿开设有与所述收纳部一一对应的且沿竖直方向分布的开口,所述开口内滑动连接有滑块,所述连杆的两端分别和所述收纳部以及所述滑块铰接,且所述滑块与所述活动部固定连接。
12.可选的,还包括清灰机构,所述清灰机构包括对称分布在旋转盒外周壁两侧的外护套以及固定连接在旋转盒内顶面的双向气缸,所述外护套的内部滑动连接有清洁杆,所述清洁杆的一端贯穿至旋转盒内,所述清洁杆的另一端设有清洁刷,所述双向气缸的两个输出端分别和两个所述清洁杆固定连接。
13.可选的,所述清灰机构还包括固定连接在安装盒内底面的第二电机,所述第二电机的输出轴上设有连接部,所述连接部与所述旋转盒的内顶面相连。
14.可选的,所述安装盒和旋转盒均为圆盘形中空结构,所述安装盒的外周壁上设有呈环状的限位圈,所述旋转盒的内环壁上开设有与所述限位圈相适配的限位槽,所述限位圈和所述限位槽转动配合。
15.可选的,还包括监控相机,所述监控相机固定安装在所述激光发射器的顶面,且所述监控相机的摄像头朝向与激光发射器的朝向一致。
16.本发明还提供一种基于机器视觉的金属管道激光除锈机器人的除锈方法,包括以下步骤:
17.s1:将机器人本体放入竖直金属管道内;
18.s2:利用收纳组件调节收纳部的倾角,使得各滚动轮均与金属管道的内壁抵接;
19.s3:利用驱动组件驱动各滚动轮同步转动,使机器人本体沿着竖直管道上升;
20.s4:启动拍摄相机,实时采集金属管道内壁图像信息,并将图像信息输出给控制器;
21.s5:控制器自动分析图像,并确定锈迹所在区域;
22.s6:当控制器识别到管道内壁的锈迹时,机器人本体停止运动;
23.s7:舵机云台调节激光发射器的角度,使激光发射器对准锈迹并进行除锈。
24.本发明具有的有益效果是:
25.1.本发明通过机器人本体携带除锈机构可在竖直管道内爬升,从而无需拆装金属管道即可对管道内壁进行除锈,因此大大简化了除锈步骤,提高了除锈效率;
26.2.本发明具有拍摄机构和控制器,用于获取管道内壁的图像信息并对图像信息进行分析,因此本发明可实现定点除锈,大大提高了除锈效率;
27.3.本发明具有清灰机构,清灰机构用于清除附着在管道内壁的污垢,因此有利于拍摄机构采集到更清晰的图像信息。
附图说明
28.为了更清楚地说明本发明实施方案或现有技术中的技术方案,下面将对实施方案
或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方案,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
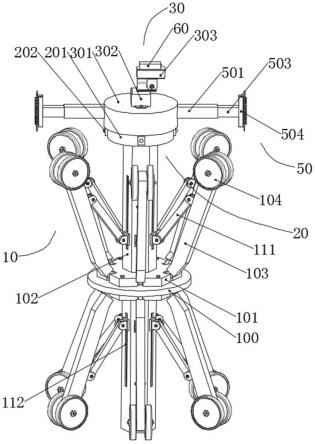
29.图1为本发明结构示意图;
30.图2为本发明结构剖视图;
31.图3为图2中a处放大对应图;
32.图4为图2中b处放大对应图。
33.图中:10、机器人本体;100、载台;101、底座;102、立柱;103、收纳部;104、滚动轮;105、转动轴;106、蜗轮;107、第一电机;108、蜗杆;109、升降气缸;110、活动部;111、连杆;112、开口;113、滑块;20、摄像机构;;201、安装盒;202、拍摄相机;203、限位圈;204、限位槽;30、除锈机构;301、旋转盒;302、舵机云台;303、激光发射器;40、控制器;50、清灰机构;501、外护套;502、双向气缸;503、清洁杆;504、清洁刷;505、第二电机;506、连接部;60、监控相机。
具体实施方式
34.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
35.实施例:请参阅图1-图4,一种基于机器视觉的金属管道激光除锈机器人,包括机器人本体10、摄像机构20、除锈机构30和控制器40;其中,机器人本体10包括载台100以及固定连接在载台100上下两面的两块底座101,底座101为正六边形,且底座101与载台100之间通过螺栓固定连接,两块底座101的相背面均固定设置有立柱102,底座101的外围均匀设置有收纳部103,收纳部103的数量为六根,收纳部103的底端与底座101转动连接,收纳部103的顶部转动连接有滚动轮104,且收纳部103为中空结构,收纳部103的内侧设有用于驱动滚动轮104旋转的驱动组件;具体的,驱动组件包括转动轴105、固定套接在转动轴105外部的蜗轮106以及位于收纳部103内侧的第一电机107和蜗杆108,转动轴105与收纳部103转动配合,转动轴105的两端均伸出至收纳部103的外侧并同轴连接有滚动轮104,第一电机107固定连接在收纳部103内,第一电机107的输出轴与蜗杆108同轴连接,且蜗杆108与蜗轮106啮合设置,因此,通过第一电机107可间接驱动滚动轮104旋转,进而控制机器人本体10沿着管道内壁移动。
36.另外,立柱102为中空结构,立柱102上设有用于调节收纳部103倾角的收纳组件,用于控制收纳部103展开或收纳,具体的,收纳组件包括升降气缸109、活动部110以及和收纳部103一一对应的连杆111,升降气缸109的缸体固定连接在立柱102的内部,升降气缸109的活塞杆与活动部110连接,用于控制活动部110沿竖直方向升降,立柱102的外周壁上贯穿开设有与收纳部103一一对应的且沿竖直方向分布的开口112,开口112的顶端与立柱102的顶端平齐,开口112内滑动连接有滑块113,连杆111的两端分别和收纳部103以及滑块113铰接,且滑块113与活动部110固定连接,因此,通过升降气缸109可控制活动部110升降,进而控制收纳部103的倾角,使收纳部103展开或收纳。
37.在以上实施例的基础之上,摄像机构20包括安装盒201和均匀设置安装盒201外周壁上的拍摄相机202,安装盒201固定连接在位于上方的一根立柱102的顶端,如图1所示,拍
摄相机202与控制器40电连接,用于获取管道内的图像信息,并将图像信息输出给控制器40,控制器40可用于分析拍摄相机202采集到的图像信息,识别锈迹并确定锈迹所在区域。
38.另外,除锈机构30包括旋转盒301、固定连接在旋转盒301顶面的舵机云台302以及固定安装在舵机云台302的输出端的激光发射器303,旋转盒301转动连接在安装盒201的上方,具体的,安装盒201和旋转盒301均为圆盘形中空结构,安装盒201的外周壁上设有呈环状的限位圈203,旋转盒301的内环壁上开设有与限位圈203相适配的限位槽204,如图4所示,限位圈203和限位槽204转动配合,因此在具体使用过程中,舵机云台302可控制激光发射器303的角度,使激光发射器303发射激光并消除锈迹。
39.本实施例还包括清灰机构50,清灰机构50包括对称分布在旋转盒301外周壁两侧的外护套501以及固定连接在旋转盒301内顶面的双向气缸502,外护套501焊接固定旋转盒301的外部,外护套501的内部滑动连接有清洁杆503,清洁杆503的一端贯穿至旋转盒301内,清洁杆503的另一端设有清洁刷504,双向气缸502的两个输出端分别和两个清洁杆503固定连接,即双向气缸502可控制两个清洁杆503同步运动;清灰机构50还包括固定连接安装盒201内底面的第二电机505,第二电机505的输出轴上设有连接部506,连接部506与旋转盒301的内顶面相连,即第二电机505可控制旋转盒301转动,进而控制清洁刷504沿着管道内壁转动,用于清灰。
40.本实施例还包括监控相机60,监控相机60固定安装在激光发射器303的顶面,且监控相机60的摄像头朝向与激光发射器303的朝向一致;本实施例在具体使用过程中,当机器人本体10沿着管道内壁前进时,云台舵机302控制监控相机60的摄像头指向正前方,用于拍摄管道内部的尽头,从而保证机器人本体10可以在管道尽头处及时停止。
41.值得一提的是,本实施例中的控制器40设置在安装盒201内,另外,控制器40的信号输出端与第一电机107、第二电机505、舵机云台302均电连接,因此,控制器40可控制机器人本体10在竖直管道内爬升或下降,并可调节激光发射器303的角度,使其对准锈迹进行除锈。
42.基于上述激光除锈机器人,本实施例还提供一种基于机器视觉的金属管道激光除锈机器人的除锈方法,包括以下步骤:
43.s1:将机器人本体10放入竖直金属管道内。根据现场具体情况而定,可以将机器人本体10自下而上放入金属管道内,也可以将机器人本体10自上而下放入金属管道内。
44.s2:利用收纳组件调节收纳部103的倾角,使得各滚动轮104均与金属管道的内壁抵接。此时,机器人本体10固定在金属管道内,然后再开启第二电机505,利用第二电机505带动旋转盒301转动,进而利用清洁刷504清理金属管道内壁的灰尘和污垢。
45.s3:利用驱动组件驱动各滚动轮104同步转动,使机器人本体10沿着竖直管道上升;若机器人本体10是自上而下放入金属管道内的,则利用驱动组件控制机器人本体10沿着管道下降。
46.s4:启动拍摄相机202,实时采集金属管道内壁图像信息,并将图像信息输出给控制器40。
47.s5:控制器40自动分析图像,并确定锈迹所在区域。
48.s6:当控制器40识别到管道内壁的锈迹时,机器人本体10停止运动,控制器40同时关闭第二电机505,使旋转盒301保持静止状态。
49.s7:舵机云台302调节激光发射器303的角度,使激光发射器303对准锈迹并进行除锈。
50.本实施例通过机器人本体10携带除锈机构30进入竖直金属管道内,由于机器人本体10可在竖直管道内任意行走,且机器人本体10上还携带有摄像机构20,因此能够自动识别锈迹,起到定点除锈的功能。
51.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1