一种化学发光检测仪的清洗站系统的制作方法
1.本发明涉及一种化学发光检测仪的清洗站系统。
背景技术:
2.化学发光技术的原理是利用化学反应释放的自由能激发中间体,使其从激发态回到基态。常用中间体有碱性磷酸酶-金刚烷胺、辣根过氧化酶-鲁米诺衍生物、辣根过氧化酶-鲁米诺衍生物。当中间体从激发态回到基态时会释放等能级的光子,对光子进行测定而进行定量分析。化学发光具有荧光的特异性,同时不需要激发光,避免了荧光分析中激发光杂散光的影响从而提高了灵敏度,并且避免了放射分析造成的环境污染和健康危害,是一种非常优秀的定量分析方法。
3.磁微粒化学发光免疫分析是将磁性分离技术、化学发光技术、免疫分析技术三者结合起来的一种分析方法。该技术充分利用了磁性分离技术的快速易自动化性,化学发光技术的高灵敏度性,以及免疫分析的特异性,在生物分析领域展现了不可替代的作用。
4.目前磁微粒化学分析免疫分析已经应用于管式化学发光免疫检测项目以及电化学发光免疫检测项目。管式化学发光作为目前发展最为迅速的化学发光检测仪器。虽然目前用于化学发光的磁微粒种类繁多,但是其中最基本的要求就是磁响应快、单分散、粒径均匀、悬浮性好、非特异吸附低、稳定性好等,因此最常用的为磁性聚苯乙烯微球。
5.针对化学发光检测的不同原理,磁珠在化学发光领域的应用主要应用方法有间接法、捕获法、固相抗原竞争法、双抗夹心法等。其中,间接法包括:a)磁性微球表面固定抗原;b)加入样本(含目标抗体)孵育,清洗;c)加入酶标抗抗体孵育,清洗;d)加发光底物,检测信号。捕获法包括:a)将igm抗体连接在固相载体上形成固相igm,清洗;b)加入稀释的血清,标本中的igm抗体被固相抗体捕获,清洗除去其他免疫球蛋白和血清中的杂质成分;c)加入特异性抗原试剂,它只与固相上的特异性igm结合,清洗;d)加入针对特异性的酶标抗体,使之与结合在固相上的抗原反应结合,清洗;e)加底物显色,检测信号。固相抗原竞争法包括:a)磁珠表面固定特异性抗原;b)加受检标本和酶标抗原的混合液孵育;c)加发光底物,检测信号。双抗夹心法包括:a)磁珠表面固定一抗;b)加样本和酶标二抗孵育,清洗;c)加发光底物,检测信号。
6.以上方法中,在化学发光检测的过程中均需对磁性微球(磁珠)进行打入清洗液清洗,清洗后需要将废液抽离。根据化学发光及其检测原理,磁珠清洗是否彻底将直接影响最终的检测准确性。现有的化学发光检测仪中,用于打入清洗液和抽取废液的清洗针均采用套筒结构,即中心的废液针用于吸取废液,同轴套接在废液针上的打液针用于打液,废液针和打液针的顶部分别连接废液管路和清洗液管路。在实践过程中发现,在更换清洗液底物瓶的前后,打液时会遇到清洗液管路内出现气泡,即清洗液以气液混合状态进入到反应杯中的情况,此种情况直接导致本次注入到反应杯中的清洗液量少于设定量,从而导致磁珠的清洗状况不达标。另外,在抽取废液时,颗粒状的磁珠往往会存在随着废液被一并抽离的情况,若同一时刻磁珠随废液过量进入到废液针时往往会造成废液针堵塞,即出现堵针的
情况;若反应杯中废液抽取不彻底,则将直接影响后续测量过程的结果。
7.此外,现有的化学发光检测仪中,由于各部件高度集成,且在有限的空间中各部件分布紧凑,用于夹取反应杯的二爪机械夹爪夹不能水平转动夹爪角度。在磁珠清洗时,装有磁珠的反应杯由二爪机械夹爪夹取后竖直向下插入位于反应杯转动模组上取放杯位的反应杯支架中。而用于注入清洗液和抽取废液的清洗针则设置在清洗装置上方,由电机驱动清洗针沿竖直方向上下移动。
技术实现要素:
8.发明目的:针对上述现有技术,提出一种化学发光检测仪的清洗站系统,提高磁珠的清洗效果。
9.技术方案:一种化学发光检测仪的清洗站系统,包括清洗针组件、反应杯转动模组、磁珠吸附组件以及控制器模块;所述清洗针组件设置在反应杯转动模组上方,清洗针组件通过电机驱动上下移动;所述磁珠吸附组件用于所述清洗针组件抽取废液时将磁珠吸附于反应杯杯壁上,并在打液清洗时使磁珠分散于反应杯内;
10.所述清洗针组件还包括串联在废液管路上的压力传感器以及设置在清洗液管路旁的非接触式液体传感器,所述压力传感器和非接触式液体传感器连接制器模块;所述控制器模块检测到所述废液管路的压力小于设定阈值时,输出堵针信号;所述控制器模块根据所述非接触式液体传感器的输出信号进行清洗液管路的气泡、空管、满管三个状态判断,并在液滴或气泡状态时对应输出状态信号。
11.进一步的,所述控制器模块根据所述非接触式液体传感器输出的电压变化来判断清洗液管路的气泡、空管、满管三个状态,具体包括:
12.在清洗液管路的空管状态下采样所述非接触式液体传感器输出值,得到空管状态的参考值;
13.连续采样所述非接触式液体传感器输出值,计算单位时间内的振荡信号占空比,若所述信号振荡占空比大于阈值,则判定为气泡状态;
14.连续采样所述非接触式液体传感器输出值,若相邻两次采样值的差值均小于阈值,且采样值均大于空管状态的参考值,则判定为满管状态。
15.进一步的,所述反应杯转动模组包括底板、反应杯支架、反应杯转动盘、第一电机;所述反应杯转动盘平行设置于底板上方,所述第一电机用于驱动所述反应杯转动盘绕中心轴转动;所述反应杯转动盘上沿圆周间隔分布若干第一通孔;
16.所述底板上沿圆周间隔分布若干第一磁铁,第一磁铁的磁极方向沿底板的径向设置,s极位于内侧,n极位于外侧;所述底板上还设置一个第二磁铁,所述第二磁铁位于相邻的两个第一磁铁之间,并正对取放杯位;
17.所述反应杯支架上设有横截面为长方形的反应杯容纳槽,所述反应杯支架的底部竖直固定转轴,所述转轴上连接有转动轴承,所述转动轴承嵌入到所述反应杯转动盘上的第一通孔内,所述转轴下端穿出所述反应杯转动盘并固定连接有第一磁铁固定块;所述第一磁铁固定块上设有第三磁铁,所述第三磁铁的磁极方向与所述反应杯容纳槽横截面的长轴方向一致;所述第三磁铁与所述第一磁铁、第二磁铁均位于同一水平圆周上;
18.所述磁珠吸附组件包括位于所述反应杯支架内侧,并沿圆周间隔设置的若干第四
磁铁。
19.进一步的,所述磁珠吸附组件中,所述第四磁铁分别固定在第二磁铁固定块上,所述第二磁铁固定块连接有驱动结构,所述驱动结构带动所述第二磁铁固定块沿径向位移。
20.进一步的,还包括混匀组件,所述混匀组件包括第三电机,所述底板上还至少设有一个位于相邻两个第一磁铁之间的第二通孔,所述第二通孔内嵌入第三磁铁固定块,所述第三磁铁固定块上设有第五磁铁,所述第五磁铁与所述第一磁铁、第二磁铁、第三磁铁均位于同一水平圆周上;所述第三电机设置在底板下方,用于驱动所述第三磁铁固定块转动。
21.进一步的,所述驱动结构包括若干支杆、底盘、第二电机,所述底盘上沿径向开有若干t型滑槽,每个所述第二磁铁固定块分别固定连接一根支杆的一端,所述支杆主体分别对应插入所述底盘上的一个t型滑槽中,所述第二电机的输出轴通过连杆传动机构连接各支杆。
22.进一步的,所述第三磁铁与所述反应杯容纳槽中反应杯的底部垂直距离大于等于30毫米。
23.进一步的,所述清洗针组件包括清洗针支架、第四电机、清洗针、传感器固定板;清洗针竖直固定在清洗针支架上,第四电机驱动清洗针支架上下运动,从而带动清洗针上下移动;传感器固定板设置于所述清洗针支架旁,用于固定压力传感器、非接触式液体传感器以及清洗针连接的管路。
24.有益效果:1、本发明的一种化学发光检测仪的清洗站系统,能够准确检测打液时是否以满管状态打入定量清洗液,以及抽废液时是否发生堵针情况,避免由于磁珠清洗不彻底影响最终的检测效果。
25.2、本发明设计了一种应杯转动模组,利用反应杯支架底部的磁铁与反应杯转动盘磁铁之间相互作用,在反应杯转动盘转动过程中,实现反应杯中磁珠的有效混匀清洗,并使得吸废液时磁珠被吸附在反应杯的短边上,相较于吸附于反应杯的长边上时,避免出现同一时刻磁珠随废液过量进入到废液针的情况,并能够减小磁损。通过调整第四磁铁相较于反应杯支架的远近距离,能够进一步提高磁珠清洗效果,并进一步避免吸废液时的磁损。通过混匀组件实现磁珠在清洗液中的动态混匀,进一步提高磁珠清洗效果。
附图说明
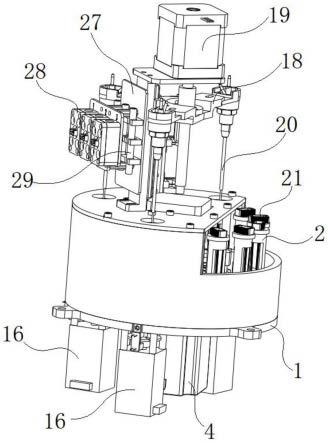
26.图1为本发明的清洗站系统的立体结构示意图;
27.图2为本发明的清洗站系统的俯视结构示意图,图中省略了传感器部件;
28.图3为本发明的清洗站系统的仰视结构示意图;
29.图4为本发明的清洗站系统中第四磁铁的分布及驱动结构示意图;
30.图5为本发明的清洗站系统中混匀组件的结构示意图;
31.图6为本发明的清洗站系统中反应杯支架结构示意图。
具体实施方式
32.下面结合附图对本发明做更进一步的解释。
33.实施例1:
34.一种化学发光检测仪的清洗站系统,包括清洗针组件、反应杯转动模组、磁珠吸附
组件以及控制器模块。清洗针组件设置在应杯转动模组上方,清洗针组件通过电机驱动上下移动。磁珠吸附组件用于清洗针组件抽取废液时将磁珠吸附于反应杯杯壁上,并在打液清洗时使磁珠分散于反应杯内。清洗针组件还包括串联在废液管路上的压力传感器以及设置在清洗液管路旁的非接触式液体传感器,压力传感器和非接触式液体传感器连接制器模块。控制器模块检测到废液管路的压力小于设定阈值时,输出堵针信号。控制器模块根据非接触式液体传感器的输出信号进行清洗液管路的气泡、空管、满管三个状态判断,并在液滴或气泡状态时对应输出状态信号。
35.如图1至图3所示,反应杯转动模组包括底板1、反应杯支架2、反应杯转动盘3、第一电机4。反应杯转动盘3平行设置于底板1上方,第一电机4设置在底板1下方,反应杯转动盘3中央固定有中心轴,第一电机4用于带动中心轴转动,从而驱动反应杯转动盘3绕中心轴转动。反应杯转动盘3上沿圆周间隔分布若干第一通孔5。
36.底板1上沿圆周间隔分布若干第一磁铁6,第一磁铁6的磁极方向沿底板1的径向设置,s极位于内侧,n极位于外侧。底板1上还设置一个第二磁铁7,第二磁铁7位于相邻的两个第一磁铁6之间,并正对取放杯位。本实施例中,第二磁铁7的磁极方向与底板1径向垂直,以便与二爪机械夹爪夹角度对应。
37.如图6所示,反应杯支架2上设有横截面为长方形的反应杯容纳槽,反应杯支架2的底部竖直固定转轴,转轴上连接有转动轴承8,转动轴承8嵌入到反应杯转动盘3上的第一通孔5内,转轴下端穿出反应杯转动盘3并固定连接有第一磁铁固定块9。第一磁铁固定块9上嵌入第三磁铁10,第三磁铁10的磁极方向与反应杯容纳槽横截面的长轴方向一致。第三磁铁10与第一磁铁6、第二磁铁7均位于同一水平圆周上。
38.磁珠吸附组件包括位于反应杯支架2内侧,并沿圆周间隔设置的若干第四磁铁11。
39.清洗针组件包括清洗针支架18、第四电机19、清洗针20、传感器固定板27。清洗针20竖直固定在清洗针支架18上,第四电机19驱动清洗针支架18上下运动,从而带动清洗针20上下移动。传感器固定板27设置于清洗针支架18旁,用于固定压力传感器28、非接触式液体传感器以及清洗针20连接的管路29。
40.本发明结构中,装有磁珠的反应杯21由二爪机械夹爪夹取后竖直向下插入位于反应杯转动模组上取放杯位的反应杯支架中,本实施例中,在反应杯21位于取放杯位时,其横截面的长边与反应杯21沿反应杯转动盘3的径向方向垂直;第一电机4带动反应杯转动盘3转动,从而带动取放杯位的反应杯支架中的反应杯21沿圆周转动,反应杯支架2底部设置的第三磁铁10与反应杯转动盘3上沿圆周间隔分布第一磁铁6产生相吸相斥作用,在到达下一个第一磁铁6位置过程中,反应杯支架2产生自转,并在到达下一个第一磁铁6位置时反应杯21切换为其横截面的短边与反应杯21沿反应杯转动盘3的径向方向垂直;在反应杯支架2从一个第一磁铁6位置转动到下一个第一磁铁6位置过程中,反应杯支架2均产生自转,且在第一磁铁6位置上始终保持反应杯21横截面的短边与反应杯21沿反应杯转动盘3的径向方向垂直,同时始终保持反应杯21的横截面同一个短边靠近反应杯转动盘3的圆心。以上过程中,反应杯21在反应杯转动盘3带动运动过程中不停的产生自转,自转时反应杯21中磁珠与第四磁铁11的距离、相对位置发生变化,从而使得磁珠在反应杯21产生移动轨迹,有助于磁珠与反应杯中清洗液更好的接触,从而促使磁珠清洗更彻底。
41.当反应杯支架2转动到正对清洗针20下方的第一磁铁6时,在第四磁铁11的作用
下,磁珠被吸附在反应杯21短边一面上,清洗针20向下移动插入反应杯21的正中央,由于此时反应杯支架2角度固定,磁珠被吸附在反应杯21的短边一面上,相较于吸附于反应杯21的短边一面上时距离清洗针20更远,能够在清洗针20吸取废液时更小的影响到吸附在距离更远的短边上的磁珠,从而减小磁损,也能进一步避免同一时刻磁珠随废液过量进入到废液针而照成堵针的情况。在反应杯支架2转动一圈后回到取放杯位时,又恢复到反应杯21横截面的长边与反应杯21沿反应杯转动盘3的径向方向垂直,从而便于二爪机械夹爪夹调度取放反应杯21。
42.优选的,为了避免第三磁铁10影响反应杯21中的磁珠,第三磁铁10与反应杯容纳槽中反应杯的底部垂直距离大于等于30毫米。底板1上还设有用于检测反应杯转动盘3转动角度的第一光耦23。
43.本发明中,控制器模块根据非接触式液体传感器输出的电压变化来判断清洗液管路的气泡、空管、满管三个状态,具体包括:
44.在清洗液管路的空管状态下采样非接触式液体传感器输出值,得到空管状态的参考值。本实施例中,该空管状态的参考值的计算方法为,采集n次非接触式液体传感器输出值,去掉最大值和最小值后计算采样的平均值:
[0045][0046]
其中,为空管状态的参考值,ai为第i次的采样值,amin为采样的最小值,amax为采样的最大值;n一般取大于等于10。
[0047]
连续采样非接触式液体传感器输出值,计算单位时间内的振荡信号占空比,若信号振荡占空比大于阈值p2,则判定为气泡状态。即,本发明通过连续采样,若当前采样值ai与前一次采集值a(i-1)的差值大于阈值p1,则即表示出现振荡信号,连续出现振荡信号即表示管路出现气液混合的气泡状态,其中,阈值p1和阈值p2的取值可根据实验标定得到。
[0048]
连续采样非接触式液体传感器输出值,若相邻两次采样值的差值均小于阈值p3,且采样值均大于空管状态的参考值则判定为满管状态。即满管状态时,非接触式液体传感器的检测值为非振荡信号。阈值p3根据传感器的不同有所区别,一般取传感器的检测精度值的2倍。
[0049]
本发明通过采用两类传感器分别对废液管路和清洗液管路进行检测,当出现废液针堵针情况,或打液时清洗液管路内出现气泡时,控制器将发出对应的提示信号,根据相关提示信号可以选择排除受到影响的化学发光检测值,即将精度可能受到影响的检测值排除在外,以保证仪器最终输出结果的准确性。
[0050]
实施例2:
[0051]
与实施例1的区别仅在于,磁珠吸附组件中,第四磁铁11分别固定在第二磁铁固定块12上,第二磁铁固定块12连接有驱动结构,驱动结构带动第二磁铁固定块12沿径向位移。
[0052]
通过调节第四磁铁11在径向上的位置,即调节相对反应杯21的距离,即能实现反应杯21从正对一个第一磁铁6位置转动到下一个第一磁铁6位置过程中,磁珠能够更好的实现打散和聚集,有利于磁珠更好的与清洗液接触。
[0053]
当反应杯支架2转动到正对清洗针20下方的第一磁铁6时,在清洗针20进行吸废液
时,控制第四磁铁11更靠近反应杯21,增强对磁珠的吸力,更进一步的避免吸废液时的磁损;当清洗针20打液时,控制第四磁铁11远离反应杯21,使得磁珠分散,有利于磁珠和清洗液全面接触,提高磁珠清洗效果。
[0054]
具体的,如图4所示,驱动结构包括若干支杆13、底盘14、第二电机15,底盘14上沿径向开有若干t型滑槽24,每个第二磁铁固定块12分别固定连接一根支杆13的一端,支杆13主体分别对应插入底盘14上的一个t型滑槽24中,第二电机15的输出轴通过连杆传动机构连接各支杆13。各t型滑槽24上还设有用于检测支杆13移动位置的第二光耦25。
[0055]
实施例3:
[0056]
如图5所示,与实施例2的区别仅在于,还包括混匀组件,混匀组件包括第三电机16,底板1上还至少设有一个位于相邻两个第一磁铁6之间的第二通孔,第二通孔内嵌入第三磁铁固定块17,第三磁铁固定块17上设有第五磁铁,第三电机16设置在底板1下方,用于驱动第三磁铁固定块17转动。
[0057]
当反应杯支架2转动到正对第三磁铁固定块17时,首先控制第四磁铁11远离反应杯21,然后通过驱动第三磁铁固定块17转动来带动第五磁铁旋转,利用第五磁铁与第三磁铁10的相吸作用,带动反应杯支架2自转,实现磁珠在清洗液中的动态混匀,提高磁珠清洗效果。
[0058]
若混匀组件设置于正对清洗针20的下方,为了保证吸液时磁珠始终吸附于反应杯的短边,该混匀组件还包括用于检测第三磁铁固定块17转动角度的第三光耦22,以及与第三磁铁固定块17转轴固定连接的光耦挡片26。
[0059]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1