一种自动化用于污染土壤的修复实验设备及其使用方法
1.本发明涉及土壤修复实验技术领域,尤其是涉及一种自动化用于污染土壤的修复实验设备。
背景技术:
2.土壤修复是使遭受污染的土壤恢复正常功能的技术措施;在土壤修复行业,已有的土壤修复技术达到一百多种,大致可分为物理、化学和生物三种方法;土壤污染可以由许多因素引起,主要因素还是由于自然土壤环境中非自然产生的物质的存在,例如地下储油罐的泄漏、杀虫剂的过度使用、受污染地表水渗透至地下地层、油和燃料排放、垃圾填埋场的废物浸出或工业废物直接排放至土壤等;而土壤有机污染主要是指化学农药的污染,这会使土壤的组成和理化性质发生变化,然后破坏土壤的正常组成,最后通过植物的吸收和食物链的积累等过程,进而对人体健康造成危害;土壤在修复前需要对取部分土壤样本进行检测,为提高检测精度经常需要对多个地点采取土壤样本,而市面上或现有技术中还没有一种专用的土壤修复实验的取样设备,只能通过人工不断的手动采样,不仅效率低、不卫生,而且还存在安全隐患;为此设计一种自动化用于污染土壤的修复实验设备来解决上述中所提到的问题。
技术实现要素:
3.本发明针对现有技术的不足,提供一种自动化用于污染土壤的修复实验设备,可自动化对土壤取样,且在取不同地点的土壤又能分类存放,代替人工手动采样,提高工作效率,有效地解决了上述背景技术中所提到的问题。
4.为解决上述问题本发明所采取的技术方案是:一种自动化用于污染土壤的修复实验设备,包括车板,所述车板上端设有收集槽,车板一侧设有支撑臂,支撑臂下端设有可转动的不完全直齿轮,支撑臂下端还设有分布在不完全直齿轮两侧的第一从动直齿轮、第二从动直齿轮,所述支撑臂上端设有l形支撑板,l形支撑板上还设有铲斗,所述不完全直齿轮与第二从动直齿轮相配合时可构成支撑臂、l形支撑板、铲斗同步向外侧摆动且l形支撑板又沿支撑臂方向向下移动的结构,所述不完全直齿轮与第一从动直齿轮相配合时可构成两个铲斗同步向内侧合拢的结构;所述支撑臂向外侧摆动时可构成收集槽向前滑动的结构;收集槽上开设有多个分布均匀又与铲斗相配合的分类槽。
5.所述车板的一侧固接有延伸座,支撑臂铰接在延伸座上,支撑臂上端固接有电机,电机一侧固接有第一锥齿轮,第一锥齿轮下端啮合有第二锥齿轮,所述不完全直齿轮同轴固接在第二锥齿轮下端。
6.所述第二从动直齿轮下端表面非圆心处铰接有摆杆,摆杆的另一端铰接在延伸座下端表面。
7.所述不完全直齿轮上端同轴固接有凸锁轮,第一从动直齿轮上端同轴固接有与凸
锁轮相配合的第一凹锁轮,第二从动直齿轮上端同轴固接有与凸锁轮相配合的第二凹锁轮。
8.所述第一从动直齿轮内壁固接有长转轴,长转轴转动连接在支撑臂内壁;所述第二从动直齿轮上端同轴固接有长凸轮,长凸轮转动连接在支撑臂内壁;所述l形支撑板上端表面前侧转动连接有第一带轮,第一带轮又滑动连接在长转轴外表面,l形支撑板上端表面后侧开设有与长凸轮相配合的圆柱通孔,l形支撑板下端表面固接有与长凸轮相啮合的第一滑销。
9.所述第一带轮一侧带轮连接有第二带轮,第二带轮转动连接在l形支撑板内壁,l形支撑板内壁设有短凸轮,l形支撑板下端表面右侧铰接有两组分布在短凸轮两侧且向外侧倾斜的第一连杆,铲斗分别铰接在对应的每组第一连杆下端,两个铲斗内侧端转动连接有一个铰接轴,短凸轮固接在铰接轴上,所述第二带轮内壁固接有与短凸轮相啮合的第二滑销。
10.所述支撑臂右端表面固接有键形套,所述延伸座上转动连接有第一直齿轮,第一直齿轮一侧啮合有直齿条,直齿条固接在收集槽下端表面,第一直齿轮上端设有单向传动机构,单向传动机构包括延伸杆,延伸杆的一侧固接有第三滑销,第三滑销滑动连接在键形套内壁;所述车板上端表面设有两个直轨,收集槽下端表面开设有两段与直轨相配合的直槽。
11.所述单向传动机构还包括与第一直齿轮转动连接的内棘轮,延伸杆固接在内棘轮外表面,内棘轮内壁啮合有两个中心对称且与第一直齿轮相铰接的棘爪,棘爪内侧端面分别固接有弹性片,弹性片的另一端分别固接在第一直齿轮上。
12.一种自动化用于污染土壤的修复实验设备的使用方法,包括以下步骤:s1通过驱动车板使装置移动到待取样点,启动电机,会使铲斗边向下移动边向右翻转,到达指定位置后电机继续工作会使两个铲斗向内侧合拢,使土壤切取到两个铲斗内,电机继续工作又会使铲斗边向上移动边向左翻转至初始位置,即收集槽的上方位置,在电机继续工作时又会使两个铲斗向外侧翻转使土壤落入到对应的分类槽内;s2当支撑臂摆动时即铲斗向下端移动取料时,收集槽会进击性向前移动一小段距离,使对应的下个分类槽移动到铲斗初始位置的正下方,接收下个取样点的土壤;使每个取样点的样本分类存放,提高检测精准度,降低误差等。
13.本发明结构新颖,构思巧妙,操作简单方便,和现有技术相比具有以下优点:1、通过驱动车板使装置移动到待取样点,启动电机,会使铲斗边向下移动边向右翻转,到达指定位置后电机继续工作会使两个铲斗向内侧合拢,使土壤切取到两个铲斗内,电机继续工作又会使铲斗边向上移动边向左翻转至初始位置,即收集槽的上方位置,在电机继续工作时又会使两个铲斗向外侧翻转使土壤落入到对应的分类槽内;代替人工取料,不仅效率高、行程短,而且安全可靠,还可防止用户被土壤感染,安全可靠。
14.2、当支撑臂摆动时即铲斗向下端移动取料时,收集槽会进击性向前移动一小段距离,使对应的下个分类槽移动到铲斗初始位置的正下方,接收下个取样点的土壤;使每个取样点的样本分类存放,提高检测精准度,降低误差等。
附图说明
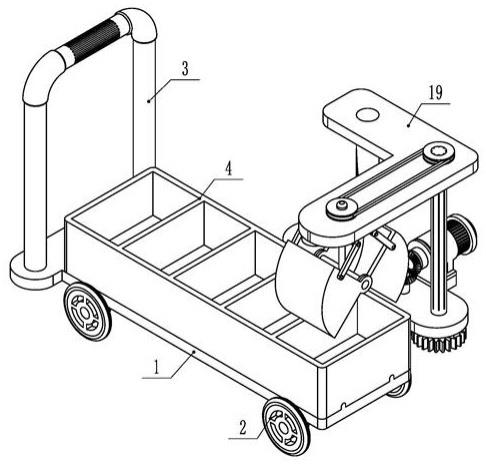
15.图1为本发明的一种自动化用于污染土壤的修复实验设备的轴测图i。
16.图2为本发明的一种自动化用于污染土壤的修复实验设备的轴测图ii。
17.图3为本发明的一种自动化用于污染土壤的修复实验设备的延伸座安装示意图。
18.图4为本发明的一种自动化用于污染土壤的修复实验设备的l形支撑板安装示意图。
19.图5为本发明的一种自动化用于污染土壤的修复实验设备的长凸轮安装示意图。
20.图6为本发明的一种自动化用于污染土壤的修复实验设备的长凸轮安装示意图。
21.图7为本发明的一种自动化用于污染土壤的修复实验设备的不完全直齿轮安装示意图。
22.图8为本发明的一种自动化用于污染土壤的修复实验设备的凸锁轮安装示意图。
23.图9为本发明的一种自动化用于污染土壤的修复实验设备的铲斗安装示意图。
24.图10为本发明的一种自动化用于污染土壤的修复实验设备的短凸轮安装示意图。
25.图11为本发明的一种自动化用于污染土壤的修复实验设备的延伸杆安装示意图。
26.图12为本发明的一种自动化用于污染土壤的修复实验设备的单向传动机构结构示意图。
27.图13为本发明的一种自动化用于污染土壤的修复实验设备的直齿条安装示意图。
28.图中标号:1-车板、2-滚轮、3-手柄、4-收集槽、5-延伸座、6-支撑臂、7-电机、8-第一锥齿轮、9-第二锥齿轮、10-不完全直齿轮、11-第一从动直齿轮、12-第二从动直齿轮、13-摆杆、14-凸锁轮、15-第一凹锁轮、16-第二凹锁轮、17-长凸轮、18-第一滑销、19-l形支撑板、20-长转轴、21-第一带轮、22-第二带轮、23-短凸轮、24-第二滑销、25-铰接轴、26-铲斗、27-第一连杆、28-直齿条、29-第一直齿轮、30-内棘轮、31-棘爪、32-弹性片、33-延伸杆、34-第三滑销、35-键形套、36-直轨、37-直槽。
具体实施方式
29.以下是本发明的具体实施例,并结合附图对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
30.如图1-13所示,本发明提供一种自动化用于污染土壤的修复实验设备,包括车板1,所述车板1上端设有收集槽4,车板1一侧设有支撑臂6,支撑臂6下端设有可转动的不完全直齿轮10,支撑臂6下端还设有分布在不完全直齿轮10两侧的第一从动直齿轮11、第二从动直齿轮12,所述支撑臂6上端设有l形支撑板19,l形支撑板19上还设有铲斗26,所述不完全直齿轮10与第二从动直齿轮12相配合时可构成支撑臂6、l形支撑板19、铲斗26同步向外侧摆动且l形支撑板19又沿支撑臂6方向向下移动的结构,所述不完全直齿轮10与第一从动直齿轮11相配合时可构成两个铲斗26同步向内侧合拢的结构;所述支撑臂6向外侧摆动时可构成收集槽4向前滑动的结构;收集槽4上开设有多个分布均匀又与铲斗26相配合的分类槽。
31.如图1-4、7所示,车板1下端表面各角处分别转动连接有滚轮2,滚轮2的作用是便于装置的移动;车板1上端表面后侧固接有手柄3,手柄3的作用是便于驱动装置到达指定位置;收集槽4的作用是便于收集取样后的土壤,可对不同地点采样的土壤进行分类存放;当
不完全直齿轮10与第二从动直齿轮12相配合时,可使铲斗26、支撑臂6、l形支撑板19同步向外侧摆动、且铲斗26、l形支撑板19又会向下移动,从而使铲斗26向下移动到接触车板1一侧的待取样点的土壤,当不完全直齿轮10与第一从动直齿轮11相啮合时,两个铲斗26会向内侧合拢,对接触到的土壤进行收集到两个铲斗26内侧;再通过不完全直齿轮10与第二从动直齿轮12、第一从动直齿轮11相配合,可使铲斗26复位到收集槽4上端后打开,从而使铲斗26内的土壤样本落入到收集槽4内,当支撑臂6摆动时又会使收集槽4向前移动,可使每次铲斗26采集后的土壤分类存放在对应的分类槽内,从而实现对不同点的土壤采集分类;自动化土壤采集,代替工人手动取样、避免受到污染及提高工作效率。
32.所述车板1的一侧固接有延伸座5,支撑臂6铰接在延伸座5上,支撑臂6上端固接有电机7,电机7一侧固接有第一锥齿轮8,第一锥齿轮8下端啮合有第二锥齿轮9,所述不完全直齿轮10同轴固接在第二锥齿轮9下端。
33.如图3、5所示,通过支撑臂6铰接在延伸座5上,可使支撑臂6向左或向右摆动;电机7的作用是为不完全直齿轮10提供转动力,电机7属于现有技术,不再赘述;第二锥齿轮9、不完全直齿轮10中心处固接有转轴,转轴贯穿支撑臂6转动连接在支撑臂6内壁;通过启动电机7,会使第一锥齿轮8转动,第一锥齿轮8转动通过与第二锥齿轮9的啮合会带动第二锥齿轮9、不完全直齿轮10转动,从而实现不完全直齿轮10转动供装置正常工作。
34.所述第二从动直齿轮12下端表面非圆心处铰接有摆杆13,摆杆13的另一端铰接在延伸座5下端表面。
35.如图3、7所示,不完全直齿轮10、第一从动直齿轮11、第二从动直齿轮12分别安装在支撑臂6下端表面一侧,第二从动直齿轮12、摆杆13、支撑臂6安装和形状如图所示,第二从动直齿轮12、摆杆13、支撑臂6、延伸座5间接组成四连杆曲柄摇杆机构,当第二从动直齿轮12转动时,通过摇杆的限位可使支撑臂6往复左右的摆动。
36.所述不完全直齿轮10上端同轴固接有凸锁轮14,第一从动直齿轮11上端同轴固接有与凸锁轮14相配合的第一凹锁轮15,第二从动直齿轮12上端同轴固接有与凸锁轮14相配合的第二凹锁轮16。
37.如图8所示,通过凸锁轮14与对应的第一凹锁轮15、第二凹锁轮16相配合,可使不完全直齿轮10与对应的第一从动直齿轮11或第二从动直齿轮12脱离啮合后产生自锁功能,可防止对应的第一从动直齿轮11、第二从动直齿轮12与不完全直齿轮10脱离啮合后转动,凸锁轮14、第一凹锁轮15、第二凹锁轮16安装和形状如图8所示。
38.所述第一从动直齿轮11内壁固接有长转轴20,长转轴20转动连接在支撑臂6内壁;所述第二从动直齿轮12上端同轴固接有长凸轮17,长凸轮17转动连接在支撑臂6内壁;所述l形支撑板19上端表面前侧转动连接有第一带轮21,第一带轮21又滑动连接在长转轴20外表面,l形支撑板19上端表面后侧开设有与长凸轮17相配合的圆柱通孔,l形支撑板19下端表面固接有与长凸轮17相啮合的第一滑销18。
39.如图4-6所示,长转轴20与第一带轮21属于花键连接,第一带轮21既能在长转轴20外表面上下滑动,长转轴20转动时又能带动第一带轮21转动,从而又可传递到两个铲斗26正常工作;通过长转轴20、长凸轮17对l形支撑板19的限位和固定,使l形支撑板19既能跟随支撑臂6前后摆动,且l形支撑板19又能在支撑臂6上端上下移动;当第二从动直齿轮12转动时又会带动长凸轮17转动,长凸轮17转动通过与第一滑销18的啮合,则会使l形支撑板19向
上或向下移动,从而实现铲斗26向上或向下移动。
40.所述第一带轮21一侧带轮连接有第二带轮22,第二带轮22转动连接在l形支撑板19内壁,l形支撑板19内壁设有短凸轮23,l形支撑板19下端表面右侧铰接有两组分布在短凸轮23两侧且向外侧倾斜的第一连杆27,铲斗26分别铰接在对应的每组第一连杆27下端,两个铲斗26内侧端转动连接有一个铰接轴25,短凸轮23固接在铰接轴25上,所述第二带轮22内壁固接有与短凸轮23相啮合的第二滑销24。
41.如图9-10所示,第二带轮22中心处内壁开设有与短凸轮23相配合的圆槽,可供短凸轮23在第二带轮22内壁上下滑动,第一连杆27、铲斗26、铰接轴25安装和形状如图9所示,通过两个第一连杆27的限位,可使对应的两个铲斗26、铰接轴25向上移动合拢或向下移动张开;第二带轮22、短凸轮23、第二滑销24、铰接轴25安装和形状如图10所示,通过铰接轴25与短凸轮23的固接,限位短凸轮23只能上下移动,当第二带轮22转动时又会带动沿着短凸轮23外表面圆周转动,短凸轮23在第二滑销24的啮合下则会往复上下移动,则又会带动铰接轴25往复上下移动,从而使铲斗26张开或闭合;通过不完全直齿轮10分别与对应的第一从动直齿轮11、第二从动直齿轮12相配合,可使对应的铲斗26跟随支撑臂6先边向左翻转边向下移动,当铲斗26左翻转至最顶端位置即向下移动至最底端位置,铲斗26则会接触到车板1一侧的待取样点的土壤,此时电机7继续工作不完全直齿轮10与第二从动直齿轮12脱离啮合开始与第一从动直齿轮11相啮合,第一从动直齿轮11与不完全直齿轮10相啮合时会使第一带轮21、第二带轮22同步转动,第二带轮22转动时则会带动短凸轮23向上移动,即两个铲斗26向内侧合拢,成为闭合状态,此时铲斗26合拢时则会切取土壤,当短凸轮23移动到顶端位置,两个铲斗26完全合拢时,成密封空间承装土壤,此时的不完全直齿轮10则会与第一从动带轮脱离啮合,再次与第二从动带轮相啮合,不完全直齿轮10再次与第二从动带轮相啮合时会使对应的铲斗26边向右翻转边向上移动,从而移动到初始位置即收集槽4的上端位置,此时不完全直齿轮10与第二从动直齿轮12又一次脱离啮合,不完全直齿轮10再次与第一从动直齿轮11相啮合,此时则会使两个铲斗26向外侧翻转展开,从而使铲斗26内的土壤落入到收集槽4内,取样方便快捷,省时省力,既能缩短铲斗26的行程,又能快速的取样。
42.所述支撑臂6右端表面固接有键形套35,所述延伸座5上转动连接有第一直齿轮29,第一直齿轮29一侧啮合有直齿条28,直齿条28固接在收集槽4下端表面,第一直齿轮29上端设有单向传动机构,单向传动机构包括延伸杆33,延伸杆33的一侧固接有第三滑销34,第三滑销34滑动连接在键形套35内壁;所述车板1上端表面设有两个直轨36,收集槽4下端表面开设有两段与直轨36相配合的直槽37。
43.如图11-13所示,第三滑销34前后的滑动连接在键形套35内壁,第一直齿轮29中心处固接有转轴,转轴转动连接在延伸座5内壁,限位第一直齿轮29只能转动;通过直槽37、直轨36的限位使收集槽4可前后的滑动,且又能向上移动使直齿条28与第一直齿轮29随时脱离啮合完成收集槽4的拆卸;通过单向传动机构,可使第一直齿轮29单向的转动,从而驱动直齿条28、收集槽4单向移动;当支撑臂6带动键形套35向右摆动时,则会拉动对应的延伸杆33向右摆动,第三滑销34在键形套35内壁滑动,当延伸杆33向右摆动时通过单向传动机构会使第一直齿轮29转动,从而通过第一直齿轮29与直齿条28的啮合会使直齿条28、收集槽4进击性向前移动;当支撑臂6向左摆动时则会驱动延伸杆33向左摆动,此时单向传动机构不再驱动第一直齿轮29转动,即收集槽4不再向前移动;因此会呈现当铲斗26右端下侧移动翻
转取料时,对应的收集槽4会向前移动一小段距离,即使下个分类槽移动到铲斗26初始位置的正下方位置,当铲斗26取料完毕后回转复位时,即向上端左侧摆动移动时,对应的收集槽4便不再移动,当铲斗26继续工作张开卸料时,此时会使铲斗26内的土壤落入到对应的分类槽内壁,从而完成分类盛装,周而复始可循环使用。
44.所述单向传动机构还包括与第一直齿轮29转动连接的内棘轮30,延伸杆33固接在内棘轮30外表面,内棘轮30内壁啮合有两个中心对称且与第一直齿轮29相铰接的棘爪31,棘爪31内侧端面分别固接有弹性片32,弹性片32的另一端分别固接在第一直齿轮29上。
45.如图12所示,通过内棘轮30、棘爪31的啮合,可实现对第一直齿轮29的单向传动,弹性片32的作用驱动两个棘爪31与内棘轮30相啮合,在延伸杆33向左摆动即内棘轮30正转时,通过内棘轮30的棘齿与棘爪31相啮合可使两个棘爪31圆周转动,即对应的第一直齿轮29转动,当延伸杆33向右摆动带动内棘轮30反转时,则内棘轮30的棘齿会与棘爪31产生相对滑动,即不再带动第一直齿轮29转动。
46.一种自动化用于污染土壤的修复实验设备的使用方法,包括以下步骤:s1通过驱动车板1使装置移动到待取样点,启动电机7,会使铲斗26边向下移动边向右翻转,到达指定位置后电机7继续工作会使两个铲斗26向内侧合拢,使土壤切取到两个铲斗26内,电机7继续工作又会使铲斗26边向上移动边向左翻转至初始位置,即收集槽4的上方位置,在电机7继续工作时又会使两个铲斗26向外侧翻转使土壤落入到对应的分类槽内;代替人工取料,不仅效率高、行程短,而且安全可靠,还可防止用户被土壤感染,安全可靠。
47.s2当支撑臂6摆动时即铲斗26向下端移动取料时,收集槽4会进击性向前移动一小段距离,使对应的下个分类槽移动到铲斗26初始位置的正下方,接收下个取样点的土壤;使每个取样点的样本分类存放,提高检测精准度,降低误差等。
48.本发明在使用时,通过驱动车板1使装置移动到待取样点,启动电机7,会使铲斗26边向下移动边向右翻转,到达指定位置后电机7继续工作会使两个铲斗26向内侧合拢,使土壤切取到两个铲斗26内,电机7继续工作又会使铲斗26边向上移动边向左翻转至初始位置,即收集槽4的上方位置,在电机7继续工作时又会使两个铲斗26向外侧翻转使土壤落入到对应的分类槽内;代替人工取料,不仅效率高、行程短,而且安全可靠,还可防止用户被土壤感染,安全可靠;当支撑臂6摆动时即铲斗26向下端移动取料时,收集槽4会进击性向前移动一小段距离,使对应的下个分类槽移动到铲斗26初始位置的正下方,接收下个取样点的土壤;使每个取样点的样本分类存放,提高检测精准度,降低误差等。
49.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式代替,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1