一种用于真空熔炼浇筑模具内腔清理的助力机械臂的制作方法
本发明涉及真空熔炼浇筑模具内腔清理,特别是涉及一种用于真空熔炼浇筑模具内腔清理的助力机械臂。
背景技术:
1、真空感应熔炼(vim),是一种在真空或惰性气氛下熔化新合金料或返回料的技术,以避免来自大气的氧化物和污染。高温合金主要应用于航空发动机和燃气轮机热端部件的制造,随着航空发动机性能的不断提升,其对高温合金材料的要求越来越严格。因此,清理承受熔炼后合金液的浇筑模具内腔是确保合金材料纯净度的关键步骤。
2、浇筑模具内腔难以清理的原因包括:首先浇筑模具具有很多型号,用于生成不同结构或尺寸的产品,在同一型号的浇筑模具中,模架内会密排大约50根直径和长度相同的钢管模,而不同型号浇筑模具的钢管模排列间隙会有所不同,其中最小间隙可为15mm,钢管模内径包括80、90、100mm等尺寸,长度包括1000、1200、1400mm等尺寸,因此清理工具需满足不同内径深度及管间隙尺寸要求;其次,每根钢管模属于深腔细长的盲孔结构、下部水平、底面利用底塞封堵、上部装有浇冒口的缩径结构;此外,每根钢管模内腔底部的交接处形成清理死角。
3、目前清理工艺包括人工操作气动软管逐个深入钢管模腔内进行吹扫,再使用工业吸尘设备吸出腔内的杂质,并多次重复清理,以确保其内部达到所需的清洁度。但该清理工艺在效率、清理效果和交叉污染风险方面存在问题。逐一多次吹扫和吸尘的方式无法满足生产效率需求,清理过程中也难以彻底清除浇冒口附近台阶面和底部交接部位的杂质,以及内壁上的附着物,同时使用高压气流冲刷可能会造成杂物颗粒从上部冲出落入附近已经清理过的腔体内,造成交叉污染,从而降低的清理效果。
4、现有专利也公开了一些采用机械设备自动化清理浇筑模具内腔,如专利号cn108406546a公开了一种集刮刷吸于一体的钢管内壁除锈设备,通过气动马达实现设备的旋转和移动;专利号cn216880868u公开了一种用于镀锌钢管内部清理的除尘装置,该装置在头部集成水洗、滚刷、气吹干、吸水功能;专利号cn113275344a中提到的一种锅炉燃烧室内壁清灰机械臂,采用伸缩机械臂配合末端棉布擦拭块,通过转动产生的离心运动贴合炉内壁清理,同时集成了集尘水滤的功能,解决了不同尺寸内径的内壁清理问题;专利号cn109434651a中提到的一种基于打磨和除尘联合运作的钢管内壁除锈设备,集成了刮锈吸尘的功能。
5、但以上设备或装置在清理具有缩径的深腔盲孔和小型内径管腔(如内径小于100mm)时效果不佳,也无法适应不同内径的浇筑模具内腔清理。部分设备在竖直操作状态下,无法彻底清腔内底部或死角的污垢,且易造成交叉污染。此外,这些设备的清洁效率不高,无法实现多管腔的同步清洁操作。因此需要一种适用于不同型号或尺寸的浇筑模具清理设备,该设备能够实现多管腔同步清洁操作,同时在清理过程中能快速调整各清扫端头之间间距,以提高清理效率。
技术实现思路
1、发明目的:本发明的目的是提供一种用于真空熔炼浇筑模具内腔清理的助力机械臂,该助力机械臂末端设有包含多组清扫端头的清洗部件,在清理过程中能快速调整各清扫端头之间间距,从而能够对不同型号或尺寸浇筑模具内腔进行清理,清理效率高、效果好、操作方便。
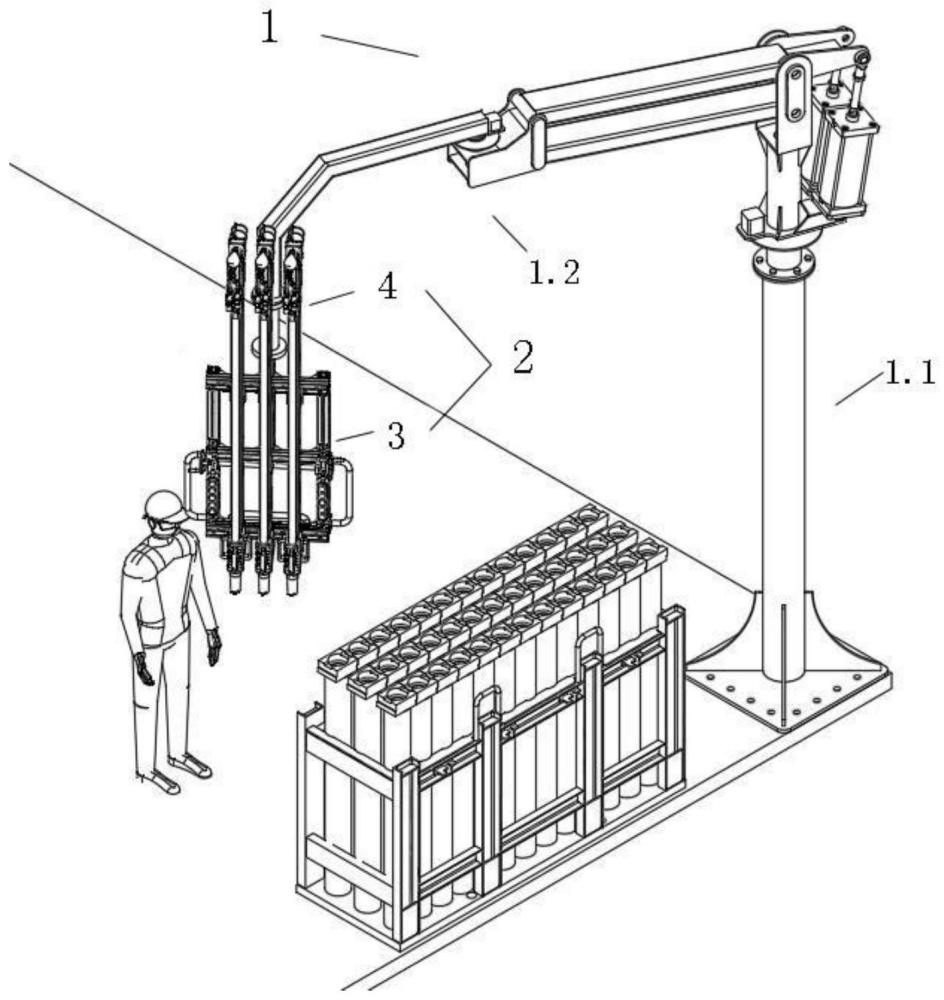
2、技术方案:为实现上述目的,本发明所述的一种用于真空熔炼浇筑模具内腔清理的助力机械臂,包括臂架,臂架末端设有用于清理浇筑模具内腔的清洗部件,所述清洗部件包括框架和可移动地安装在框架一侧的多组清洗模组,每组清洗模组均包括清洗杆组件和控制清洗杆组件轴向移动的直线组件,所述清洗杆组件的主体为清洗杆,清洗杆的末端设有用于清理浇筑模具内腔的吹扫吸端头。
3、其中,所述框架上端通过法兰连接在臂架末端;框架主体为由四根铝型材拼装而成的矩形框式结构,其中上铝型材、下铝型材上分别设有与型材轴向一致的上导轨、下导轨,所述清洗模组通过背部的扣合部件,沿着轨道方向可滑动地扣合在上导轨和下导轨上。
4、其中,所述框架的中部设有调节多组清洗模组之间间距的正反螺杆机构,所述机构通过两侧的固定轴承座横向分别安装在框架的左铝型材和右铝型材上;正反螺杆机构主体为螺杆,螺杆的两端为带动其绕轴转动的手轮,螺杆上沿着其中心轴两侧设有呈镜像对称的螺纹,两侧螺纹上分别设置有螺纹配合有安装块,所述每组安装块固定在一清洗模组的背部,通过转动手轮时带动螺杆左右两侧安装块相向移动,进而调节多组清洗模组之间间距。
5、其中,所述框架和清洗模组之间设有用于增加多组清洗模组在移动过程中稳定性的稳定杆,稳定杆整体为杆状结构,并通过轴承座固定在需移动的清洗模组的背部,稳定杆的两端为细长齿轮轴,与齿轮轴啮合的齿条分别固定在上铝型材和下铝型材上,且位于上导轨和下导轨之间。
6、其中,所述框架的底部设有快速定位底板,该底板上设有不同间距并用于插入插销结构的孔,插销结构可拆卸地设置在每组清洗模组上,当每组清洗模组移动到所需位置时,将插销结构插入快速定位底板上对应孔内,从而对该清洗模组进行位置锁定。
7、其中,所述清洗杆为多层空心管结构,底端和上端为分别与不同层空心管连通的吹扫吸端头、动力部件。动力部件通过不同层空心管与吹扫吸端头连通,使其吹扫吸端头进入浇筑模具内腔后能够进行吸尘、吹气、扫刷。
8、其中,所述多层空心管包括内外中三层,吹扫吸端头包括吸尘口、扫刷头、吹气口,动力部件包括真空发生器、气动马达、气管;其中,吸尘口位于吹扫吸端头的中部并与内层空心管管内空间相通,内层空心管管内空间上端连接真空发生器;扫刷头固定在中层空心层管的末端,中层空心层管上端连接气动马达,且在气动马达带动下中层空心层管可绕轴转动;吹气口为多组,环状设置在外层空心管上,并与外层空心管和中层空心层管形成的空间相通,且该空间上端连接气管。
9、其中,所述扫刷头的末端安装有可自由摆动的钢丝刷头,清洗杆组件末端设有用于收紧钢丝刷头的圆柱形锥套。
10、其中,所述直线组件包括支撑型材,支撑型材的背部为与框架连接区域,支撑型材的前部沿着其轴向设有直线导轨,支撑型材的上端固定有直线电机,直线电机前端设有同步带轮,以及与同步带轮配合传动的同步带,同步带上安装有与直线导轨滑动配合的滑块,滑块上固定有清洗杆组件,通过同步带轮、同步带的传动,直线电机能够调节清洗杆组件沿着直线导轨移动。
11、其中,所述支撑型材的下侧设有直线轴承,清洗杆下端穿过直线轴承,以防止清洗杆组件在移动过程中发生摆动。
12、有益效果:本发明具有如下优点:1、所述设置在助力机械臂末端的清洗部件包含多组清洗模组,多组清洗模组之间相互独立且间距可调,从而在清扫过程中操作人员根据浇筑模具的型号或尺寸能够对清洗模组之间的间距进行快速调整,实现对多组浇筑模具的钢管模内腔进行同步清扫,清理效率高、操作方便、通用性强;
13、2、每组清洗模组底端设有吹扫吸端头,能够对浇筑模具的钢管模内腔进行全方位吹扫、扫刷、吸尘,其中进行扫刷的钢丝刷头可自由摆动地安装在清洗模组底端,从而在离心力作用下与不同直径的钢管模内壁接触进行扫刷;
14、3、每组清洗模组可上下移动地对钢管模内腔进行清扫,在清扫过程中利用吹气口和吸尘口之间形成的环形气流对颗粒杂质进行吸取收集,以避免交叉污染,同时配合可自由摆动的钢丝刷更容易清腔内底部或死角、浇冒口的污垢,清理效果好;
15、4、所述助力机械臂自动化程度高,可通过臂架上的调节机构将清洗部件调节在浇筑模具的上方,无需将清洗模组底端与钢管模管腔精确同心,减少了调节难度;
16、5、臂架的主臂和副臂上各关节带有锁紧功能,在完成末端定位作业后可以锁死各关节,降低清洗部件的自由度,使其保持稳定,便于清洗模组进行后续操作,降低了工作人员的劳动强度。
- 还没有人留言评论。精彩留言会获得点赞!